







 本文详细描述了如何使用IAP15F2K61S2单片机和提供的竞赛实训平台,实现一个包含超声波测距、模拟输入、状态指示、数据显示等功能的系统,涉及硬件配置、界面设计、按键和旋钮操作,以及上电初始状态的设定。
本文详细描述了如何使用IAP15F2K61S2单片机和提供的竞赛实训平台,实现一个包含超声波测距、模拟输入、状态指示、数据显示等功能的系统,涉及硬件配置、界面设计、按键和旋钮操作,以及上电初始状态的设定。
一、题目
一、基本要求
使用大赛组委会提供的四梯/国信长天单片机竞赛实训平台,完成本试题的程序设计与调试。程序编写、调试完成后,选手需通过考试系统提交以准考证号命名的hex文件。不符合以上文件提交要求的作品将被评为零分或者被酌情扣分。
硬件设置:
将IAP15F2K61S2单片机内部振荡器频率设定为12MHz。
键盘工作模式跳线J5配置为KBD矩阵按键模式。
扩展方式跳线J13配置为IO模式。
请注意:选手需严格按照以上要求配置竞赛板,编写和调试程序,不符合以上配置要求的作品将被评为零分或者被酌情扣分。
二、硬件框图
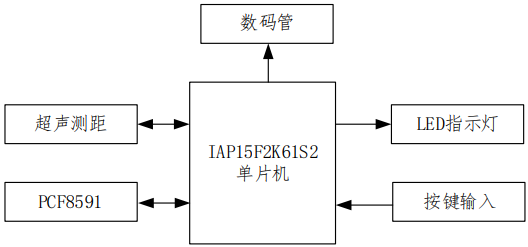
图1 系统硬件框图
三、功能描述
3.1 基本功能描述
1、通过超声波传感器完成距离测量功能;
2、通过 PCF8591完成试题要求的模拟功能;
3、通过LED指示灯完成试题要求的状态指示功能;
4、通过数码管、按键完成试题要求的数据显示、界面切换和参数设置等功能。
3.2 显示功能
1、测距界面
测距界面如图2所示,显示内容包括标识符(A)和距离值组成。距离值固定使用3位数码管显示,数码管显示不足3位时,高位(左侧)数码管熄灭。
距离值单位为:cm。

图2 测距界面
2、参数界面
参数界面如图3所示,由标识符(P)、模式值(按键模式:1;旋钮模式:2),参数下限、间隔符和参数上限组成。固定使用2位数码管显示参数下限/上限。
参数上限、参数下限单位为:cm。

图3 参数界面
3、记录界面
记录界面如图4所示,由标识符(E)和报警次数组成。

图4.1 记录界面(报警次数0-9)

图4.2 记录界面(报警次数>9)
测量的距离值由“参数下限≤测量的距离值≤参数上限”变为“测量的距离值>参数上限”或“测量的距离值<参数下限”时,报警次数加1;
注意:持续处于测量的距离值>参数上限或测量的距离值<参数下限时,报警次数不改变,
4、显示要求
(1)按照题目要求的界面格式和切换方式进行设计。
(2)数码管显示无重影、闪烁、过暗、亮度不均匀等严重影响显示效果的缺陷。
3.3 按键功能
1、功能说明
(1)S4:定义为“切换”,按下S4按键,切换“测距界面”、“参数界面”和“记录界面”。

图5 界面切换顺序
(2)S5:
在“参数界面”下,定义为“模式”,按下按键S5,切换参数调整模式。切换顺序如图6所示。

图6 模式切换
在“记录界面下”,定义为“清零”,按下按键S5,清零当前的报警次数。
(3)S9:在“参数界面”下
“按键模式”下,定义为“上限调整”,按下按键S9,参数上限加10。参数上限调整顺序:
50 60 70 80 90 50 …
“旋钮模式”下,定义为“上限”,按下按键S9,可使用旋钮调整当前参数上限。调整顺序详见3.4(1)。
(4)S8:在“参数界面”下,
“按键模式”下,定义为“下限调整”,按下按键S8,参数下限加10。参数下限调整顺序:
0 10 20 30 40 0 10 …
“旋钮模式”下,定义为“下限”,按下按键S8,可使用旋钮调整当前参数上限。调整顺序详见3.4(2)。
(5)按键要求
① 按键应做好消抖处理,避免出现一次按键动作导致功能多次触发。
② 按键动作不影响数码管显示等其他功能。
③ 当前界面或模式下无功能的按键按下,不触发其它界面的功能。
④ 参数上限调整范围“50-90”;
⑤ 参数下限调整范围“0-50”。
3.4 旋钮模式
使用PCF8591的ADC功能采集RB2的模拟信号,模拟旋钮功能调整参数上限或参数下限:
(1)“上限”调整过程如图7所示:
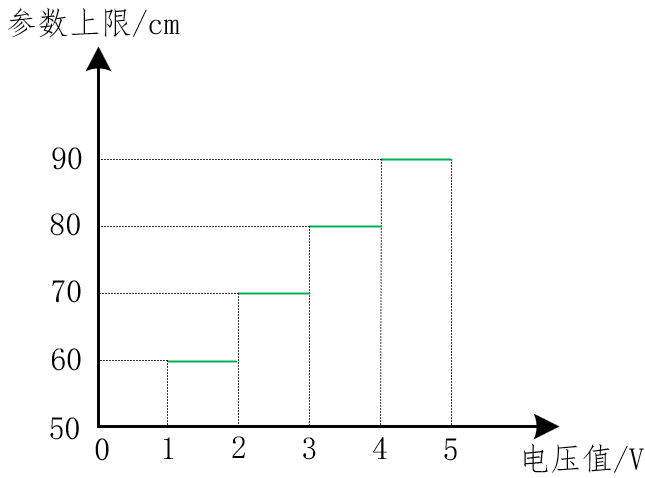
图7 “上限”调整过程
(2)“下限”调整过程如图8所示:
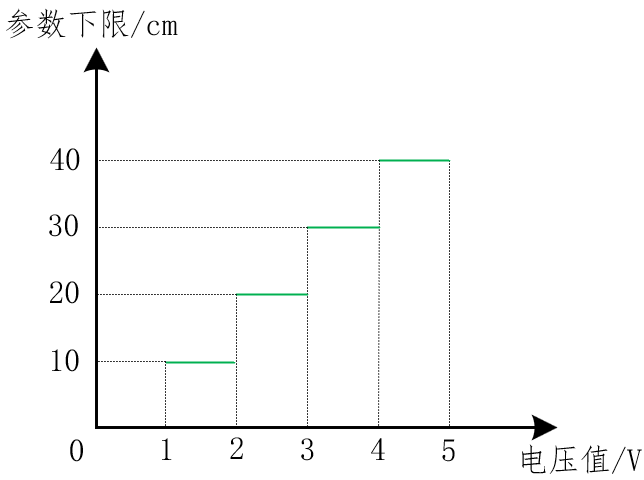
图8 “下限”调整过程
3.5 LED指示灯功能
(1)测距界面下,指示灯 L1 点亮,否则指示灯 L1 熄灭。
(2)参数界面下,指示灯 L2 点亮,否则指示灯 L2 熄灭。
(3)记录界面下,指示灯 L3 点亮,否则指示灯 L3 熄灭。
(4)参数下限≤测量的距离值≤参数上限,指示灯L8点亮,否则L8以0.1s为间隔切换亮灭状态。
(5)除L1、L2、L3和L8指示灯外,其余指示灯均处于熄灭状态。
3.6 初始状态
请严格按照以下要求设计作品的上电初始状态。
1、处于测距界面
2、按键模式
3、参数上限60;参数下限10。
二、代码
1.mian.c
main.c
#include <STC15F2K60S2.H>
#include <iic.h>
#include <Seg.h>
#include <Key.h>
#include <Led.h>
#include <Ultra.h>
#include <Init.h>
//变量定义区
//键盘专用
unsigned char Key_Slow_Down;//10ms
unsigned char Key_Val,Key_Down,Key_Up,Key_Old;
//数码管专用
unsigned int Seg_Slow_Down;//500ms
unsigned char Seg_Pos;
unsigned char Seg_Buf[8]={10,10,10,10,10,10,10,10};
unsigned char Seg_Point[8]={0,0,0,0,0,0,0,0};
//Led灯专用
unsigned char ucLed[8]={0,0,0,0,0,0,0,0};
//超声波测距
unsigned int Distance;//实时距离
//PCF8592
float Voltage;//实时电压
unsigned char Seg_Disp_Mode;//界面切换标志 0-测距界面,1-参数界面,2-记录界面
/*测距界面*/
//超声波测距
unsigned int Distance;//实时距离
/*参数界面*/
unsigned char Seg_Mode;//1-按键模式 2-旋钮模式
unsigned char Seg_Max=60;//参数上限 初始值:60
unsigned char Seg_Min=10;//参数下限 初始值:10
bit Seg_Voltage_Flag1;//参数上限:1-旋钮调整 0-按键调整
bit Seg_Voltage_Flag2;//参数下限:1-旋钮调整 0-按键调整
/*记录界面*/
unsigned char Index;//报警次数
unsigned char Distance_Old;
bit flag;//判断上一次的Index的值处于什么地方
bit Led_Star_Flag;//闪烁标志位
unsigned char Timer_100ms;//100毫秒
//关于参数上限的读取函数
void Read_Seg_Max()
{
Voltage=AD_Read(0x43)/51.0;
if(Voltage>=0&&Voltage<1) Seg_Max=50;
else if(Voltage>=1&&Voltage<2) Seg_Max=60;
else if(Voltage>=2&&Voltage<3) Seg_Max=70;
else if(Voltage>=3&&Voltage<4) Seg_Max=80;
else Seg_Max=90;
}
//关于参数下限的读取函数
void Read_Seg_Min()
{
Voltage=AD_Read(0x43)/51.0;
if(Voltage>=0&&Voltage<1) Seg_Min=0;
else if(Voltage>=1&&Voltage<2) Seg_Min=10;
else if(Voltage>=2&&Voltage<3) Seg_Min=20;
else if(Voltage>=3&&Voltage<4) Seg_Min=30;
else Seg_Min=40;
}
//按键处理函数
void Key_Proc()
{
if(Key_Slow_Down) return;
Key_Slow_Down=1;
Key_Val = Key_Read();
Key_Down = Key_Val&(Key_Old ^ Key_Val);
Key_Up = ~Key_Val&(Key_Old ^ Key_Val);
Key_Old=Key_Val;
switch(Key_Down)
{
case 4:
if(++Seg_Disp_Mode==3) Seg_Disp_Mode=0;
break;
case 5:
if(Seg_Disp_Mode==1)
Seg_Mode=!Seg_Mode;
else if(Seg_Disp_Mode==2)
Index=0;
break;
case 9:
if(Seg_Disp_Mode==1)
{
if(Seg_Mode==0)
{
Seg_Voltage_Flag1=0;
Seg_Max+=10;
if(Seg_Max==100)
Seg_Max=50;
}
else if(Seg_Mode==1)
{
Seg_Voltage_Flag1=1;
Seg_Voltage_Flag2=0;
}
}
break;
case 8:
if(Seg_Disp_Mode==1)
{
if(Seg_Mode==0)
{
Seg_Voltage_Flag2=0;
Seg_Min+=10;
if(Seg_Min==50)
Seg_Min=0;
}
else if(Seg_Mode==1)
{
Seg_Voltage_Flag2=1;
Seg_Voltage_Flag1=0;
}
}
break;
}
}
//数码管清除函数
void Clear_Seg()
{
unsigned char i;
for(i=0;i<8;i++)
{
Seg_Buf[i]=10;
Seg_Point[i]=0;
}
}
void Index_Judge()
{
if((Distance_Old>=Seg_Min)&&(Distance_Old<=Seg_Max))
flag=1;
else
flag=0;
if(flag==1)
{
if((Distance>Seg_Max)||(Distance<Seg_Min))
Index++;
}
Distance_Old=Distance;
}
//数码管处理函数
void Seg_Proc()
{
if(Seg_Slow_Down) return;
Seg_Slow_Down=1;
Distance=Ultra_Data();
Index_Judge();
if(Seg_Voltage_Flag1==1)
Read_Seg_Max();
if(Seg_Voltage_Flag2==1)
Read_Seg_Min();
switch(Seg_Disp_Mode)
{
//测距界面
case 0:
Clear_Seg();
Seg_Buf[0]=12;//A
Seg_Buf[5]=(Distance/100%10>0)?(Distance/100%10):10;
Seg_Buf[6]=((Distance/10%10==0)&(Distance/100%10==0))?10:(Distance/10%10);
Seg_Buf[7]=Distance%10;
break;
//参数界面
case 1:
Clear_Seg();
Seg_Buf[0]=13;//P
Seg_Buf[1]=Seg_Mode+1;
Seg_Buf[3]=Seg_Min/10;
Seg_Buf[4]=Seg_Min%10;
Seg_Buf[5]=11;//-
Seg_Buf[6]=Seg_Max/10;
Seg_Buf[7]=Seg_Max%10;
break;
//记录界面
case 2:
Clear_Seg();
Seg_Buf[0]=14;//E
if(Index>9)
Seg_Buf[7]=11;//-
else
Seg_Buf[7]=Index;
break;
}
}
//其他处理函数
void Led_Proc()
{
unsigned char i;
for(i=0;i<3;i++)
ucLed[i]=(i==Seg_Disp_Mode);
if(flag==1) ucLed[7]=1;
else ucLed[7]=Led_Star_Flag;
}
//定时器0初始化
void Timer0Init(void) //1毫秒@12.000MHz
{
AUXR &= 0x7F; //定时器时钟12T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0x18; //设置定时初始值
TH0 = 0xFC; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
EA=1;
ET0=1;
}
void Timer0Sever() interrupt 1
{
if(++Key_Slow_Down==10) Key_Slow_Down=0;
if(++Seg_Slow_Down==500) Seg_Slow_Down=0;
if(++Seg_Pos==8) Seg_Pos=0;
if(flag==0)
{
if(++Timer_100ms==100)
{
Timer_100ms=0;
Led_Star_Flag=!Led_Star_Flag;
}
}
Seg_Disp(Seg_Pos,Seg_Buf[Seg_Pos],Seg_Point[Seg_Pos]);
Led_Disp(Seg_Pos,ucLed[Seg_Pos]);
}
//main()函数
void main()
{
System_Init();
Timer0Init();
Ultra_Data();
while(1)
{
Key_Proc();
Seg_Proc();
Led_Proc();
}
}
2.ultra.c
超声波测距
ultra.c
#include <Ultra.h>
#include <intrins.h>
sbit TX=P1^0;
sbit RX=P1^1;
void Delay12us() //@12.000MHz
{
unsigned char i;
_nop_();
_nop_();
i = 36;
while (--i);
}
void Ultra_Init()
{
unsigned char i;
for(i=0;i<8;i++)
{
TX=1;
Delay12us();
TX=0;
Delay12us();
}
}
unsigned char Ultra_Data()
{
unsigned int time;
CMOD=0x00;
CH=CL=0;
ET0=0;
Ultra_Init();//8个方波
ET0=1;
CR=1;//开始计时
while((RX==1)&&(CF==0));
CR=0;//停止计时
if(CF==0)
{
time=(CH<<8)|CL;
return (time*0.017);//单位:cm
}
else
{
//超过测量范围
CF=0;
return 999;
}
}3.Led.c
Led.c
#include <Led.h>
void Led_Disp(unsigned char addr,unsigned char flag)
{
static unsigned char temp=0x00;
static unsigned char temp_old=0xff;
if(flag)
temp|=0x01<<addr;
else
temp&=~(0x01<<addr);
if(temp_old!=temp)
{
P0=~temp;
P2=P2&0x1f|0x80;
P2&=0x1f;
temp_old=temp;
}
}4.Key.c
Key.c
#include <Key.h>
unsigned char Key_Read()
{
unsigned char temp=0;
P44=0;P42=1;P35=1;P34=1;
if(P33==0) temp=4;
if(P32==0) temp=5;
if(P31==0) temp=6;
if(P30==0) temp=7;
P44=1;P42=0;P35=1;P34=1;
if(P33==0) temp=8;
if(P32==0) temp=9;
if(P31==0) temp=10;
if(P30==0) temp=11;
P44=1;P42=1;P35=0;P34=1;
if(P33==0) temp=12;
if(P32==0) temp=13;
if(P31==0) temp=14;
if(P30==0) temp=15;
P44=1;P42=1;P35=1;P34=0;
if(P33==0) temp=16;
if(P32==0) temp=17;
if(P31==0) temp=18;
if(P30==0) temp=19;
return temp;
}5.Seg.c
Seg.c
#include <Seg.h>
unsigned char Wulu[8]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
unsigned char Dulu[15]={
0xc0, //0
0xf9, //1
0xa4, //2
0xb0, //3
0x99, //4
0x92, //5
0x82, //6
0xf8, //7
0x80, //8
0x90, //9
0xff, //熄灭
0xbf, //-
0x88, //A
0x8c, //P
0x86 //E
};
void Seg_Disp(unsigned char addr,unsigned char dat,unsigned char point)
{
//段选消隐
P0=0xff;
P2=P2&0x1f|0xe0;
P2&=0x1f;
//位选
P0=Wulu[addr];
P2=P2&0x1f|0xc0;
P2&=0x1f;
//段选
P0=Dulu[dat];
if(point)
P0&=0x7f;
P2=P2&0x1f|0xe0;
P2&=0x1f;
}
6.Init.c
Init.c
#include <Init.h>
void System_Init(void)
{
//关闭Led
P0=0xff;
P2=P2&0x1f|0x80;
P2&=0x1f;
//关闭蜂鸣器、继电器
P0=0x00;
P2=P2&0x1f|0xa0;
P2&=0x1f;
}















 1227
1227











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









