







目录导航栏
前言
以下学习笔记均来自bearpi,具体安装软件以及学习视频请查看
链接: 小熊派开源社区/BearPi-HM Nano
内容涉及学习视频未提及的好用工具以及功能调用。由于内容偏多,本次笔记将分开多次进行发表。非常感谢小熊派提供开源学习资料。
需要md版笔记可私信
1. vscode 在此项目中需要配置的好用插件⭐
1.1 vscode软件中文界面
扩展插件搜索安装
”*Chinese (Simplified) (简体中文) Language Pack for Visual Studio Code*“
1.2 编译环境
扩展插件搜索安装
"C/C++""python"
1.3 ctrl+滚轮放大缩小编译器以及终端字体大小
设置输入
mouseWheelZoom进行勾选
1.4 自动保存
设置输入
Auto save进行勾选
1.5 报错曲线提示
设置输入
(ctrl+shift+p)Enable/disable error squiggles选择enable
1.6 注释翻译神器
扩展插件搜索安装”
Comment Translate“
1.7 gn文件demo高亮
扩展插件搜索安装”
GN“
1.8 远程
扩展插件搜索安装"
ssh"
1.9 ai提示demo补全
扩展插件搜索安装"
通义"
2. 虚拟机配置可能出现的问题
可查阅我的博客文章~
SSH连接Ubuntu后本机ping不通虚拟机的ip问题||最后的解决
修改网络地址ip时出现“出现了一个意外的情况。不能完成所有你在设置中所要求的更改。”
3. 获取源码
创建文件夹📁: mkdir code(文件名称)
进入文件夹📁:cd code
下载源码①: hpm init -t default(回车)再输入hpm i @bearpi/bearpi_hm_nano
编译源码:hpm dist
下载源码②:git clone +(gitee的 仓库https)
编译命令:python build.py BearPi-HM_Nano
4. 编写demo
- 将下载的code丢入vscode
- 在
applications\bearpi\BearPi-HM_Nano\semple中新建文件夹 - 在文件夹内新建demo
新建.c文件
新建 BUILD.gn文件
注意c文件应包含
#include<stdio.h>
#include "ohos_init.h"
void (函数名)()
{
}
APP_FEATURE_INIT(函数名);
注意BUILD.gn文件包含
static_library("自定义"){
sources[
"相同文件夹内的.c文件"
]
include_dirs =[
"//utils/native/lite/include"
(其他需要引用的头文件可以通过base-iot_hardware中右键头文件复制相对路径)
]
}
注:所有的“”不可忽略,只需要将文字替换成对应的文件名称以及文件夹名称即可
4.1 编译
- 可用mobaXterm终端去编译,输入指令
hpm dist - 用vscode终端输入编译指令:Python build.py BearPi-HM_Nano(用
hpm dist也行但是编译过慢)
注:编译的时候需要将终端进入到code文件编译
涉及到的linux指令:
ssh (bearpi终端的ip),回车并输入密码
cd code
4.2 烧录
HiBurn 波特率设置为921600,
选择文件路径:Z(映射文件盘符):\code\out\BearPi-HM_Nano\Hi3861_wifiiot_app_allinone.bin
勾选Auto burn,点击connect,烧录完成点击disconnect
5. cmsis_os2的API常用功能
以下功能均来自cmsis_os2的API,查阅手册网址:cmsis_OS2
注:常用功能解释中“返回 CMSIS-RTOS 运行结果。”为@brief枚举CMSIS-RTOS的返回值
typedef enum {
/** 操作成功完成 */
osOK = 0,
/** 未指定的错误 */
osError = -1,
/**超时*/
osErrorTimeout = -2,
/** 资源错误 */
osErrorResource = -3,
/** 参数不正确 */
osError参数 = -4,
/** 内存不足 */
osErrorNoMemory = -5,
/** 服务中断 */
osErrorISR = -6,
/**保留。它用于防止编译器优化枚举。*/
osStatusReserved = 0x7FFFFFFF
} osStatus_t;
5.1 任务管理
1、LiteOS中的任务是抢占式调度机制,高优先级的任务可打断低优先级任务,低优先级任务必须在高优先级任务阻塞或
结束后才能得到调度,同时支持时间片轮转调度方式。
2、LiteOS的任务默认有32个优先级(0-31),最高优先级为0,最低优先级为31。
5.1.1 任务状态
就绪(Ready): 该任务在就绪列表中,只等待CPU。
运行(Running): 该任务正在执行。
阻塞(Blocked): 该任务不在就绪列表中。包含任务被挂起、任务被延时、任务正在等待信号量、读写队列或者等待读写事件等。
退出态(Dead): 该任务运行结束,等待系统回收资源。
任务ID: 在任务创建时通过参数返回给用户,作为任务的一个非常重要的标识。
任务优先级: 优先级表示任务执行的优先顺序。
任务入口函数: 每个新任务得到调度后将执行的函数。
任务控制块TCB: 每一个任务都含有一个任务控制块(TCB)。TCB包含了任务上下文栈指针(stack pointer)、任务状态、任务优先级、任务ID、任务名、任务栈大小等信息。TCB可以反映出每个任务运行情况。
任务栈: 每一个任务都拥有一个独立的栈空间,我们称为任务栈。
任务上下文: 任务在运行过程中使用到的一些资源,如寄存器等,我们称为任务上下文。LiteOS在任务挂起的时候会将本任务的任务上下文信息,保存在自己的任务栈里面,以便任务恢复后,从栈空间中恢复挂起时的上下文信息,从而继续执行被挂起时被打断的代码。
任务切换: 任务切换包含获取就绪列表中最高优先级任务、切出任务上下文保存、切入任务上下文恢复等动作。
5.1.2 任务调度机制
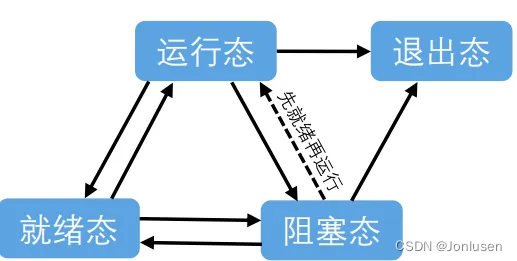
就绪态→运行态: 任务创建后进入就绪态,发生任务切换时,就绪列表中最高优先级的任务被执行,从而进入运行态,但此刻该任务依旧在就绪列表中。
运行态→阻塞态: 任务运行因挂起、读信号量等待等,在就绪列表中被删除进入阻塞。
阻塞态→就绪态(阻塞态→运行态): 阻塞的任务被恢复后(任务恢复、延时时间超时、读信号量超时或读到信号量等),此时被恢复的任务会被加入就绪列表,从而由阻塞态变成就绪态;此时如果被恢复任务的优先级高于正在运行任务的优先级,则会发生任务切换,将该任务由就绪态变成运行态。
就绪态→阻塞态: 任务也有可能在就绪态时被阻塞(挂起)。
运行态→就绪态: 有更高优先级任务创建或者恢复后,发生任务切换而进入就绪列表。
运行态→退出态: 任务运行结束,内核自动将此任务删除,此时由运行态变为退出态。
阻塞态→退出态: 阻塞的任务调用删除接口,任务状态由阻塞态变为退出态。
5.1.3 实现任务管理
/*创建活动线程。*/
osThreadId_t osThreadNew(osThreadFunc_t func, void *argument, const osThreadAttr_t *attr)
参数: func– 指示线程回调函数的条目。 argument– 指示指向传递给线程的参数的指针。 attr– 指示线程属性。
返回: 返回线程 ID;如果发生错误,则返回 NULL
/*获取线程的名称。*/
const char *osThreadGetName(osThreadId_t thread_id)
参数: thread_id– 指示线程 ID,该 ID 是使用 osThreadNew 或 osThreadGetId 获取的。
返回: 返回线程名称;如果发生错误,则返回 NULL。
/*获取当前正在运行的线程的 ID。*/
osThreadId_t osThreadGetId(void)
返回: 返回线程 ID;如果发生错误,则返回 NULL。
/*获取线程的状态。*/
osThreadState_t osThreadGetState(osThreadId_t thread_id)
参数: thread_id– 指示线程 ID,该 ID 是使用 osThreadNew 或 osThreadGetId 获取的。
返回: 返回线程状态。
/*获取线程的堆栈大小。*/
uint32_t osThreadGetStackSize(osThreadId_t thread_id)
参数: thread_id– 指示线程 ID,该 ID 是使用 osThreadNew 或 osThreadGetId 获取的。
返回: 返回堆栈大小(以字节为单位);如果出现错误,则返回 0。
/*根据栈水印获取一个线程可用的栈空间大小*/
uint32_t osThreadGetStackSpace(osThreadId_t thread_id)
参数: thread_id– 指示线程 ID,该 ID 是使用 osThreadNew 或 osThreadGetId 获取的。
返回: 返回可用的堆栈大小(以字节为单位);如果出现错误,则返回 0。
/*更改线程的优先级。*/
osStatus_t osThreadSetPriority(osThreadId_t thread_id, osPriority_t priority)
参数: thread_id– 指示线程 ID,该 ID 是使用 osThreadNew 或 osThreadGetId 获取的。 priority– 表示新的优先级。
返回: 返回 CMSIS-RTOS 运行结果。
/*获取活动线程的优先级。*/
osPriority_t osThreadGetPriority(osThreadId_t thread_id)
参数: thread_id– 指示线程 ID,该 ID 是使用 osThreadNew 或 osThreadGetId 获取的。
返回: 返回线程的 prority。
/*将当前正在运行的线程设置为就绪状态。*/
osStatus_t osThreadYield(void)
返回: 返回 CMSIS-RTOS 运行结果。
/*挂起线程。*/
osStatus_t osThreadSuspend(osThreadId_t thread_id)
参数: thread_id– 指示线程 ID,该 ID 是使用 osThreadNew 或 osThreadGetId 获取的。
返回: 返回 CMSIS-RTOS 运行结果。
/*从挂起状态恢复线程。*/
osStatus_t osThreadResume(osThreadId_t thread_id)
参数: thread_id– 指示线程 ID,该 ID 是使用 osThreadNew 或 osThreadGetId 获取的。
返回: 返回 CMSIS-RTOS 运行结果。
/*终止线程。*/
osStatus_t osThreadTerminate(osThreadId_t thread_id)
参数: thread_id– 指示线程 ID,该 ID 是使用 osThreadNew 或 osThreadGetId 获取的。
返回: 返回 CMSIS-RTOS 运行结果
/*获取活动线程数。*/
uint32_t osThreadGetCount(void)
返回: 返回数字;如果出现错误,则返回 0。
5.2 定时器管理
**软件定时器,**是基于系统Tick时钟中断且由软件来模拟的定时器。当经过设定的Tick时钟计数值后会触发用户定义的回调函数。定时精度与系统Tick时钟的周期有关。
软件定时器功能上支持:
⚫ 静态裁剪:能通过宏关闭软件定时器功能。
⚫ 软件定时器创建。
⚫ 软件定时器启动。
⚫ 软件定时器停止。
⚫ 软件定时器删除。
⚫ 软件定时器剩余Tick数获取。
5.2.1 运作机制
软件定时器使用了系统的一个队列和一个任务资源,软件定时器的触发遵循队列规则,先进先出。
定时时间短的定时器总是比定时时间长的靠近队列头,满足优先被触发的准则。
软件定时器以Tick为基本计时单位,当用户创建并启动一个软件定时器时,Huawei LiteOS会根据当前系统Tick时间及用户设置的定时间隔确定该定时器的到期Tick时间,并将该定时器控制结构挂入计时全局链表。
当Tick中断到来时,在Tick中断处理函数中扫描软件定时器的计时全局链表,看是否有定时器超时,若有则将超时的定时器记录下来。
Tick中断处理函数结束后,软件定时器任务(优先级为最高)被唤醒,在该任务中调用之前记录下来的定时器的超时回调函数。
5.2.2 定时器创建
/*创建并初始化计时器。*/
osTimerId_t osTimerNew(osTimerFunc_t func, osTimerType_t type, void *argument, const osTimerAttr_t *attr)
参数: func– 表示定时器回调函数的输入。 type– 指示计时器类型。 argument– 指示指向计时器回调中使用的参数的指针。 attr– 指示指向计时器属性的指针。不使用此参数。
返回: 返回计时器 ID;如果发生错误,则返回 NULL。
/*启动或重新启动计时器。*/
osStatus_t osTimerStart(osTimerId_t timer_id, uint32_t ticks)
参数: timer_id– 表示计时器 ID,这是使用 osTimerNew 获取的。 ticks– 表示自计时器开始运行以来的刻度数。
返回: 返回 CMSIS-RTOS 运行结果。
/*停止计时器。*/
osStatus_t osTimerStop(osTimerId_t timer_id)
参数: timer_id– 表示计时器 ID,这是使用 osTimerNew 获取的。
返回: 返回 CMSIS-RTOS 运行结果。
/*检查计时器是否正在运行。*/
uint32_t osTimerIsRunning(osTimerId_t timer_id)
参数: timer_id– 表示计时器 ID,这是使用 osTimerNew 获取的。
返回: 如果计时器正在运行,则返回 1;否则返回 0。
/*删除计时器。*/
osStatus_t osTimerDelete(osTimerId_t timer_id)
参数: timer_id– 表示计时器 ID,这是使用 osTimerNew 获取的。
返回: 返回 CMSIS-RTOS 运行结果。















 3594
3594











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









