







记性差,写下来方便看;
本人主要学习配套视频是电子设计工坊的视频,觉得代码很精简,受益匪浅;
LED
编写代码
//关闭所有灯
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_All, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
//打开指定的灯
HAL_GPIO_WritePin(GPIOC, led_value<<8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);若是需要对led以0.1s闪烁,可以以0.1s一次执行LED_Process(void);
在LED_Process中led进行异或操作,可以使得电平不断翻转;
KEY
配置流程
1.STM32CUBEMX:
配置按键连接引脚为GPIO_Input模式;
无需配置无上下拉模式;
PS:按键引脚已经上拉到高电平;
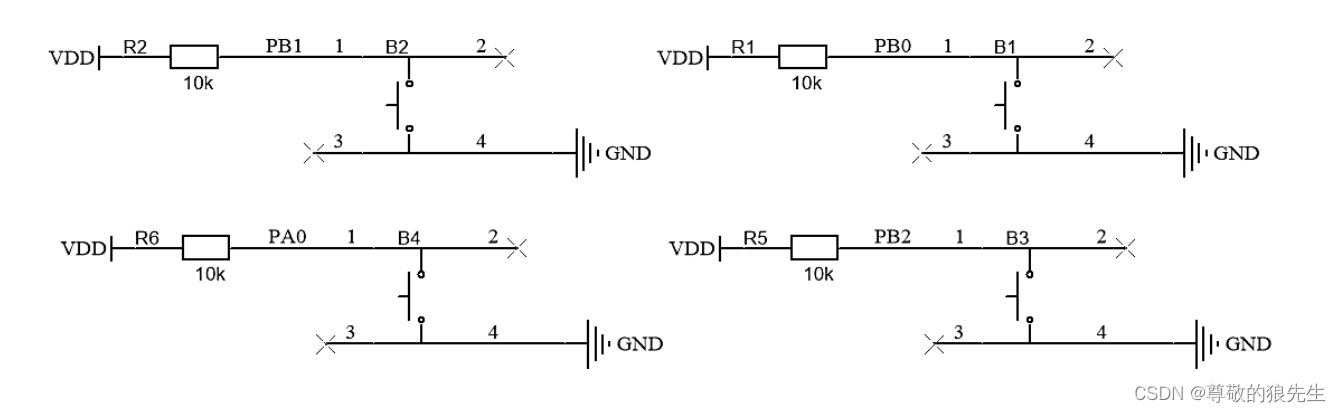
硬件电路图
IO口:未按下,高电平;按下,低电平;
编写代码
1.key编写;理解一下,多打几遍就记住了;
#define KB1 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0)
#define KB2 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1)
#define KB3 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2)
#define KB4 HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)
#define KEYPORT KB1 | (KB2<<1) | (KB3<<2) | (KB4<<3) | 0xf0
u8 Trg; //单次触发
u8 Cont; // 长按
void Key_Read(void)
{
u8 ReadData = (KEYPORT)^0xff;//括号一定要有 ^的优先级很低
Trg = ReadData & (ReadData ^ Cont);
Cont = ReadData;
}2.使用方法;
__IO uint32_t KEYTick = 0;
void Key_Process(void)
{
if(uwTick - KEYTick < 10) return ;
KEYTick = uwTick;
Key_Read();
//短按
if(Trg & 0x01) //B1
{
do somethings...
}
if(Trg & 0x02) //B2
{
do somethings...
}
//长按
if(Cont & 0x01) //B1
{
do somethings...
}
}ADC
配置流程
1.STM32CUBEMX:
设置ADC的GPIO为ADC输入模式;
设置成单端模式(Single-edned);
特别注意:在时钟树界面查看,ADC的时钟是否打开,为80M;
2.从模板中移植adc.c和adc.h代码到编程工程;(移植流程非常固定)
2.1在main函数当中添加adc.h,并添加ADC初始化代码;
2.2配置stm32g4xx_hal_conf.h文件,取消注释#define HAL_ADC_MODULE_ENABLE);
2.3开启ADC的外设时钟,并添加结构体定义;
2.4添加ADC相关的HAL库驱动文件(stm32gxx_hal_adc.c和stm32gxx_hal_adc_ex;
3.调用函数:
(1)HAL_ADC_Start:启动ADC转换;
(2)HAL_ADC_GetValue:读取ADC采集的值;
PS:测量一次ADC就要启动一起ADC;
硬件电路图

编写代码
HAL_ADC_Start(&hadc1);
ADC1_Val = HAL_ADC_GetValue(&hadc1);
ADC1_R38_Voltage = ADC1_Val / 4096.0f * 3.3f;有些题目需要对adc采集到的数据进行滤波处理;
进行均值滤波,采集10个数据求平均即可;
AT24C02(EEPROM)
配置流程
1.移植资源数据包里的i2c.h和i2c.c文件;初始化I2CInit();
2.在i2c.c文件当中编写AT24C02读写函数;并声明函数;
3.测试读写函数;
编写代码
1.AT24C02的读写函数;
AT24C02的设备地址是0xA0;
特别注意:写操作之后需要延时一段时间,给芯片写的时间;
//写24C02
void EEPROM_Write(u8 add,u8 dat)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(add);
I2CWaitAck();
I2CSendByte(dat);
I2CWaitAck();
I2CStop();
HAL_Delay(5); //延时5ms
}
//读24C02
u8 EEPROM_Read(u8 add)
{
u8 dat;
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(add);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
dat = I2CReceiveByte();
I2CSendNotAck();
I2CStop();
return(dat);
}以下函数可实现板子复位次数,在main函数中进行初始化,不需要再while中一直执行;
void EEPROM_Init(void)
{
if(EEPROM_Read(0x22) == 0x78) //不是第一次开机,open_num++
{
open_num = EEPROM_Read(0x00); //上电读取open_num的值
open_num++;
EEPROM_Write(0x00, open_num);
}
if(EEPROM_Read(0x22) != 0x78) //是第一次开机,open_num写为1
{
EEPROM_Write(0x22, 0x78);
EEPROM_Write(0x00, 1);
open_num = EEPROM_Read(0x00); //上电读取open_num的值
}
}MCP4017
1. STM32CUBEMX:
设置ADC的GPIO为ADC输入模式;
并设置成单端模式(Single-edned);
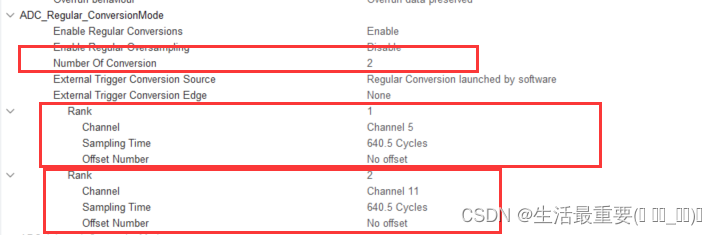
2.设置ADC的转换通道数目(Numbei Of Conversion)大于1时;要设置Rank和Sample Time;
3.将新生成的代码移植到工程文档;
4.在i2c.c文件当中编写MCP4017读写函数;并声明函数;测试完成读写程序;
5.调用函数:
(1)HAL_ADC_Start:启动ADC转换;
(2)HAL_ADC_GetValue:读取ADC采集的值;
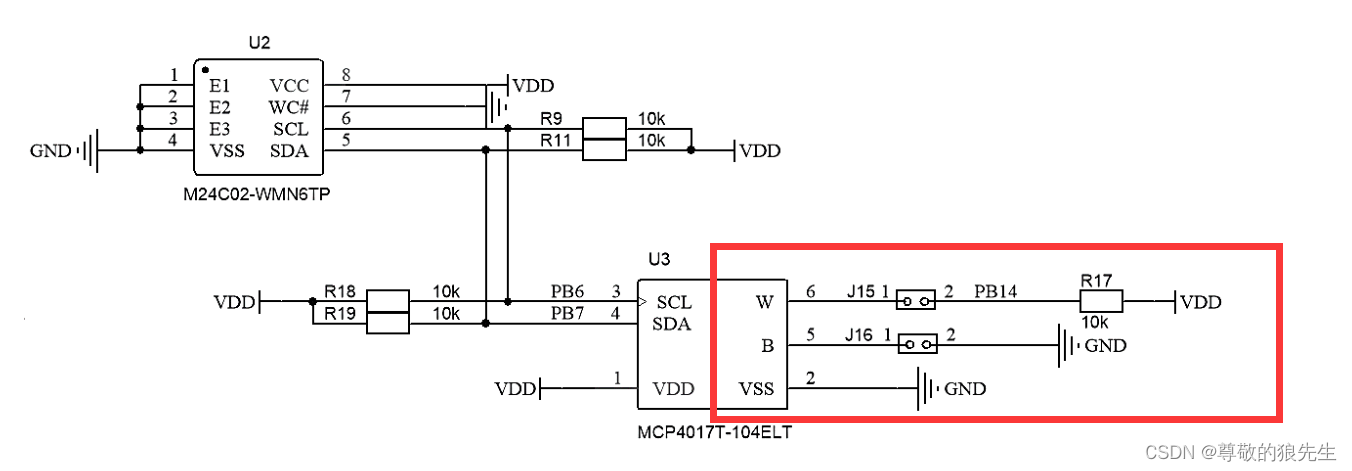
硬件电路图
编写代码
1.MCP4017的读写函数;
MCP4017的设备地址是0x5E;
void MCP4017_Write(u8 Val)
{
I2CStart();
I2CSendByte(0x5E);
I2CWaitAck();
I2CSendByte(Val);
I2CWaitAck();
I2CStop();
}
//读MCP4017
u8 MCP4017_Read(void)
{
u8 val;
I2CStart();
I2CSendByte(0x5F);
I2CWaitAck();
val = I2CReceiveByte();
I2CSendNotAck();
I2CStop();
return val;
}以下代码adc1转换有两个通道,adc2转换有一个通道;
//adc1
u16 adc1_r38_value;
u16 adc1_mcp_value;
u8 mcp_data;
float adc1_r38_vol;
float adc1_mcp_vol;
//adc2
u16 adc2_r37_value;
float adc2_r37_vol;
void ADC_Process(void)
{
MCP4017_Write(0x6f); //写数据
mcp_data = MCP4017_Read(); //读数据验证
//获取adc1通道5的电压值 通道5排序第1
HAL_ADC_Start(&hadc1);
adc1_mcp_value = HAL_ADC_GetValue(&hadc1);
adc1_mcp_vol = adc1_mcp_value / 4096.0f * 3.3f;
//获取adc1通道11的电压值 通道11排序第2
HAL_ADC_Start(&hadc1);
adc1_r38_value = HAL_ADC_GetValue(&hadc1);
adc1_r38_vol = adc1_r38_value / 4096.0f * 3.3f;
//获取adc2通道15的电压值
HAL_ADC_Start(&hadc2);
adc2_r37_value = HAL_ADC_GetValue(&hadc2);
adc2_r37_vol = adc2_r37_value / 4096.0f * 3.3f;
}LCD
注意事项
1.LCD分辨率320*240;最多显示十行,
从Line0~Line9;每行最多显示20个字符;
2.sprintf函数:需包含头文件“stdio.h>”;
注意避免长数据对短数据的覆盖;
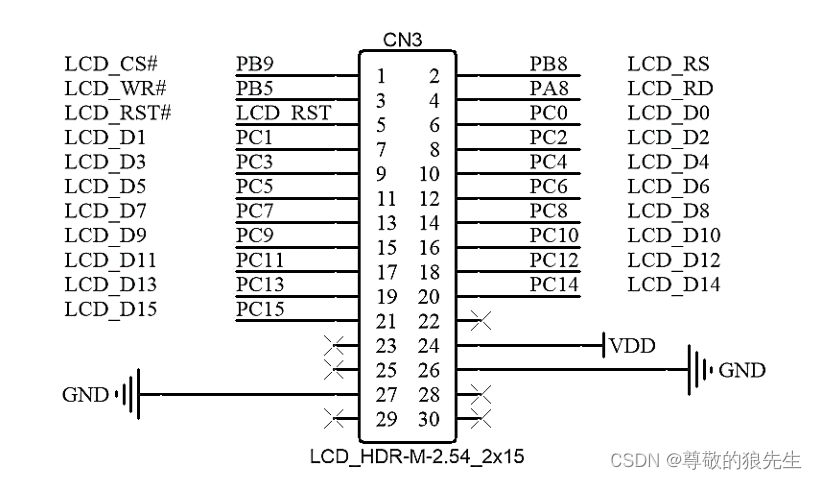
3.使用赛场资源历程HAL_06_LCD可以不用再配置LED的引脚,可直接使用;
但是需要配置PD2为输出模式;低电平保持,高电平可修改;
硬件电路图
编写代码
1.sprintf函数的基本使用方法;定义char display_buf[20]数据存放数组;
DAC
配置流程
1.STM32CUBEMX:
配置DAC输的GPIO为DAC输出通道;
模式为输出到外部引脚(Connected to external pin only);
PA4-DAC1_CH1 PA5-DAC1_CH2;
2.将新生成的代码移植到工程文档;无需开启外设时钟;
3.调用函数:
(1)HAL_DAC_SetValue:设置DAC转换的值;
(2)HAL_DAC_Start:启动DAC转换;
DAC资源查询
<<数据手册>>4.4.10

硬件电路图

编写代码
DAC_CH1_Voltage = (1.1f/3.3f)*4095;
HAL_DAC_SetValue(&hdac1, DAC_CHANNEL_1, DAC_ALIGN_12B_R, DAC_CH1_Voltage);
HAL_DAC_Start(&hdac1, DAC_CHANNEL_1);RTC
配置流程
1.STM32CUBEMX:
激活RTC的时钟和日历功能;(打两个勾即可)

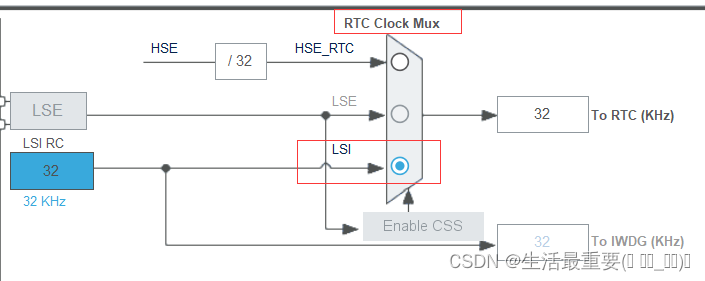
2.配置RTC的时钟,初始化状态,将RTC模块的时钟配置成1Hz,对应1s;

3.RTC采用内部低速时钟(LIS);即32KHz,默认就是,不需要修改;
4.将rtc.c和rtc.h移植到工程文档;开启外设时钟;
5.调用函数:
(1)HAL_RTC_GetTime:获取时间;
(2)HAI_RTC_GetData:获取日期;
实现功能
1.获取年月日和时分秒毫秒;可分闰年大月小月;
2,注意编码格式是BCD编码;调试和LCD显示时用十六进制%x进行显示;
编写代码
RTC_TimeTypeDef sTime;//时间结构体
RTC_DateTypeDef sDate;//日期结构体
void RTC_Process(void)
{
HAL_RTC_GetTime(&hrtc, &sTime, RTC_FORMAT_BCD); //获取时间
HAL_RTC_GetDate(&hrtc, &sDate, RTC_FORMAT_BCD); //获取日期
//显示日期
sprintf((char *)display_buf, "%02x-%02x-%02x", sDate.Year, sDate.Month, sDate.Date);
LCD_DisplayStringLine(Line2, display_buf);
//显示时间
sprintf((char *)display_buf, "%02x-%02x-%02x", sTime.Hours,sTime.Minutes,sTime.Seconds);
LCD_DisplayStringLine(Line3, display_buf);
}USART-TX
配置流程
1.STM32CUBEMX:
配置USART1的PA9和PA10为串口收发引脚;
USART的Mode选择Asynchronous;
2.根据需求,配置USART的波特率,数据位长度,奇偶校验位,停止位和时钟;

3.将uart.c和uart.h移植到工程文档;开启外设时钟;
4.调用函数:
(1)HAL_UART_Transmit:串口发送函数;
硬件电路图
硬件连接已确定,只能使用PA9和PA10;

编写代码
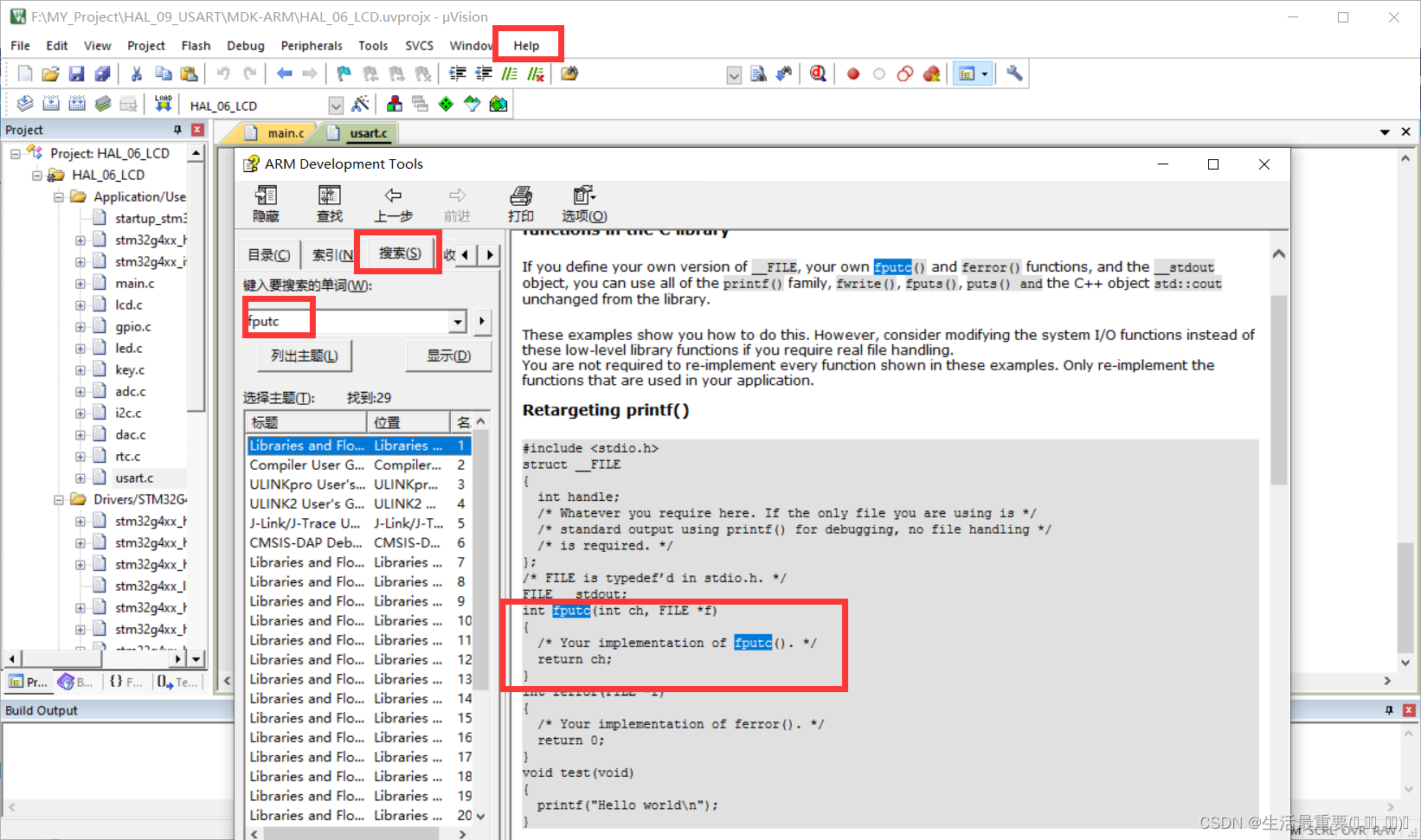
1.在usart.c当中编写fputc函数;
int fputc(int ch, FILE *f)
{
/* Your implementation of fputc(). */
HAL_UART_Transmit(&huart1, (unsigned char *)&ch, 1, 50);
return ch;
}可以在菜单栏的Help的uVision help查找fputc;
里面有大部分的代码,修改成上方那样即可;
2.在main函数中调用printf可输出字符和变化的数据; 用STC-ISP进行接收数据
PS:字符的长度需要-1,因为包含了结束符;
u8 USART_Arr[]={"你好\r\n"};//无需定义数组的大小 否则产生结束符影响下一次串口发送
void USART_Process(void)
{
HAL_UART_Transmit(&huart1,(unsigned char*)"HelloWorld\r\n",sizeof("HelloWorld\r\n")-1,50); //有结束符
HAL_UART_Transmit(&huart1,(unsigned char *)USART_Arr,sizeof(USART_Arr)-1,50);
printf("D = %d \r\n", 123); //无结束符
printf("F = %f \r\n", 123.123);
printf("HelloWorld \r\n");
}USART-RX
配置流程
1.勾选NVIC Setting中的使能USART1的中断;
2.初始化里,开启中断HAL_UART_Receive_IT(&huart1,usart_buf,1);
3.main.c文件当中重定义接收回调函数void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart);
4.在回调函数中打断点,硬件仿真用STC_ISP发送数据测试能不能进入中断里面;
5.编写接收回调函数,函数需要调用HAL_UART_Receive_IT(&huart1,usart_buf,1);
编写代码
1.定义一个两位数组,用于中断接收收到的数据;
2.再定义一个多位数组,存放每次两位数组接收到的数据;
3.使用 if 函数对换行符进行判断,判断接收到的数据是否结束;换行符为‘\n’ ;0a 0d
4.发送数据时,需要在数据结尾带上0a 0d;
5.编写串口清除函数RxIdle_Process();
函数功能:对存放数据的数组进行清除,防止数据的堆叠;保证每次接收到的数据从第一位开始;
6.可以将接收到数据进行处理,但是要避免出现0a 0d这两个数据处理外设;
u8 usart_buf[2]; //中断接收数组
u8 rx_buf[10]; //数据存放数组
u8 rx_cnt = 0; //存放数组位
u8 rx_flag_lcd = 0;
__IO uint32_t USARTTick = 0;
//串口接收
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//do somethings
USARTTick = uwTick; //更新计时
rx_buf[rx_cnt] = usart_buf[0]; //存放接收字符
rx_cnt++;
if(usart_buf[0] == '\n')//换行符 0a 0d
{
rx_cnt = 0;
if( (rx_buf[1] == 0x0a) || (rx_buf[1] == 0x0d))//避免换行符提前出现,若是多个位置如何避免
{
rx_buf[1] = 0x00;
}
LED_Disp(rx_buf[1]);
rx_flag_lcd = 1;
}
HAL_UART_Receive_IT(&huart1, usart_buf, 1);//开启下一次串口中断
}
//串口接收清除
void RxIdle_Process(void)
{
u8 i;
if(uwTick - USARTTick < 50) return ; //50ms到?
USARTTick = uwTick;
rx_cnt = 0;//清除数组内容
rx_flag_lcd = 0;
memset(rx_buf, '\0', sizeof(rx_buf));//数组清除函数,需要包含头文件"string.h"头文件
}PWM测量输入信号
配置流程
1.STM32CUBEMX:
开启TIM的GPIO的定时器功能;
通道模式配制成输入捕获模式(Input Capture direct mode);打开NVIC;
配置预分频值PSC为80,每1us自增1;根据需求配置ARR的值;
配置ARR为0xFFFF(65535);对应测量取值范围为15H-1MHZ;
配置ARR为0xFFFF_FFFF(2^32);对应测量取值范围为0.00023H-1MHZ;
2.将tim.c和tim.h的代码移植到工程文档;
3.开始定时器PWM捕获中断HAL_TIM_IC_Start_IT(&htimx,TIM_CHANNEL_y);
4.编写回调函数;
5.在回调函数当中设置断点,能不能进入中断当中
6.编写PWM回调函数,再次调用HAL_TIM_IC_Start_IT(&htimx,TIM_CHANNEL_y);
7.调用函数:
(1)__HAL_TIM_SetCounter:设置计数器的值;一般用来清零;
(2)__HAL_TIM_GetCounter:获取计数器的值;获取占空比和周期;
(3)TIM2->CCER:修改上升或者下降沿触发中断;
最后在回调函数中进行数据处理得到测量信号的频率和占空比;
硬件电路图

编写代码
1.回调函数中获取测量信号的频率和占空比;
u32 pwm_tim3_cnt1;
u32 pwm_tim3_cnt2;
u8 pwm_tim3_state;
u32 pwm_tim3_freq;
float pwm_tim3_duty;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
//如果是多个通道输入捕获,则进行if判断
if(htim == &htim3)
{
if(pwm_tim3_state == 0)
{
__HAL_TIM_SetCounter(&htim3, 0); //开始计时
TIM3->CCER |= 0x0002; //转为下降沿触发中断
pwm_tim3_state = 1;
}
else if(pwm_tim3_state == 1)
{
pwm_tim3_cnt1 = __HAL_TIM_GetCounter(&htim3); //获取占空比时间
TIM3->CCER &= ~0x0002; //转为上升沿触发中断
pwm_tim3_state = 2;
}
else if(pwm_tim3_state == 2)
{
pwm_tim3_cnt2 = __HAL_TIM_GetCounter(&htim3); //获取周期时间
pwm_tim3_freq = 1000000 / pwm_tim3_cnt2;
pwm_tim3_duty = pwm_tim3_cnt1 * 100.0f / pwm_tim3_cnt2;
pwm_tim3_state = 0;
}
HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_1);
}
}CCER进行修改的值根据不同的定时器通道的值也不同,根据参考手册查看
PWM输出方波信号
配置流程
1.STM32CUBEMX:
开启TIM的GPIO的定时器功能;
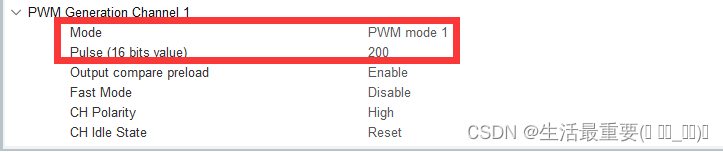
通道模式为PWM产生通道(PWM Generation CH1);
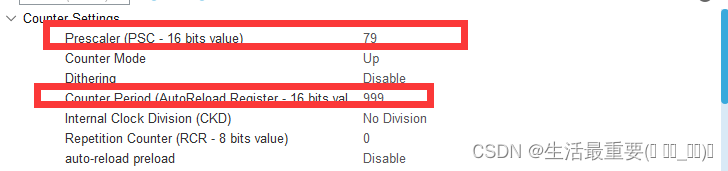
配置预分频值PSC为80,每1us自增1;
根据需求配置ARR的值和Pluse的值;
PWM模式选mode1;极性选择高;
以上都根据需要而定,可以组合成不同频率和占空比的信号;
2..将tim.c和tim.h的代码移植到工程文档;
3..调用函数:
(1)HAL_TIM_PWM_Start(&htimx, TIM_CHANNEL_y):启动指定定时器通道生成PWM;
(2)TIM16->ARR = 499:修改输出信号频率;
(3)TIM17->CCRx = 500:修改指定通道输出信号的占空比;注意写上通道值;
硬件电路图

编写代码
无
其他
一、按键长按:
//KB4长按
if(Cont & 0x08) //按键长按
{
kb4_cnt++; //长按计时
}
if((Trg == 0x00) && (Cont == 0x00)) //无按键按下
{
if(kb4_cnt >= 65) //2s到?
{
kb4_cnt = 0; //清零
do somethings...
}
else if (kb4_cnt != 0) //2s未到
{
kb4_cnt = 0; //清零,防止累加
}
}
//按键程序每31ms执行一次;所以200/31=65;当长按计次到65时代表大约2s到了二、细节
1.工程需包含#include “stdio.h”和 #include “string.h” ,#include “lcd.h” ;方便之后编写代码;
2.STM32CUBEMX新生成的工程,下载设置中添加128k的芯片类型;
3.串口接收到的数据为ASCII码,转换为普通的数据需要进行 -‘\0’处理;
4.结构体定义的方法
typedef struct
{
u8 tyep[5];
u8 code[5];
u8 in_year;
u8 in_month;
u8 in_day;
u8 in_hour;
u8 in_minute;
u8 in_second;
u8 pos; //停车位置 1-8
} TYPE_CAR_INFO;
TYPE_CAR_INFO car_infomation[8];














 3538
3538











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









