







前言:
DC-DC的BUCK电路是最近主板使用频率较高的电路,通过MATLAB对于BUCK进一步了解,本文主要进行知识的记录。
- DC-DC---- BUCK电路
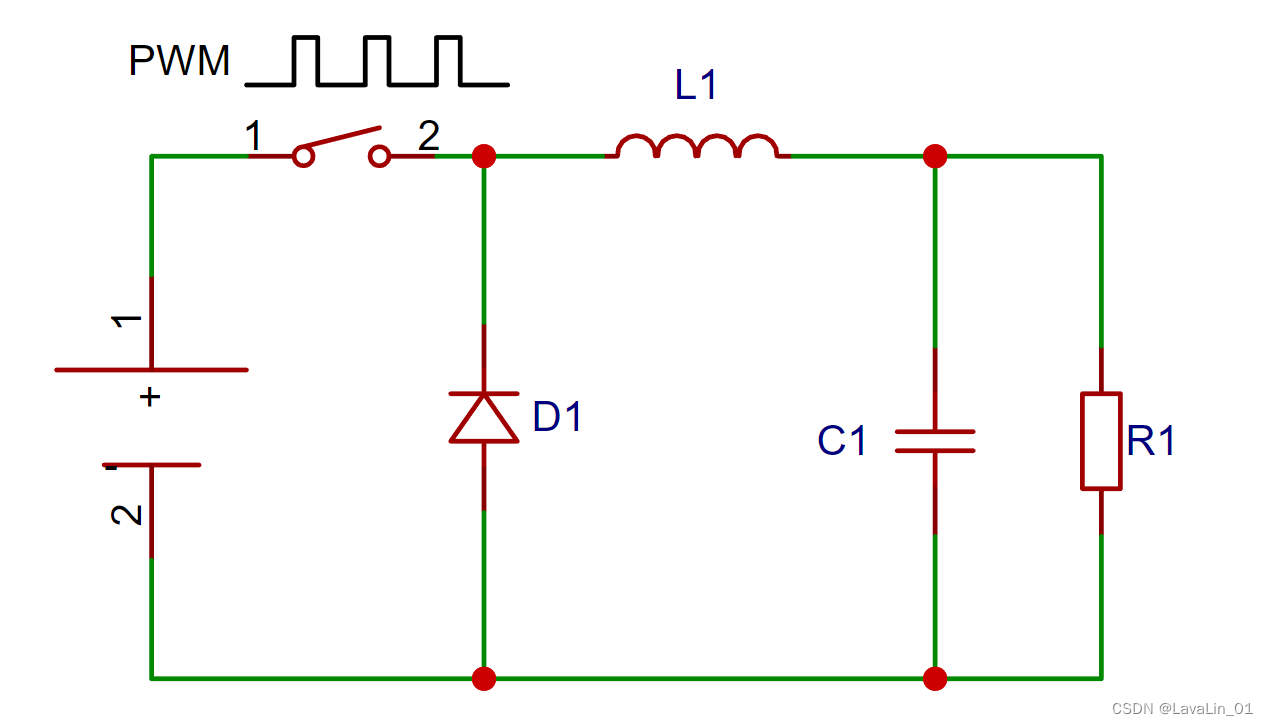
首先了解BUCK的拓扑图
为了比较直观的了解,下面是通过仿真来模拟12V转6V的过程。
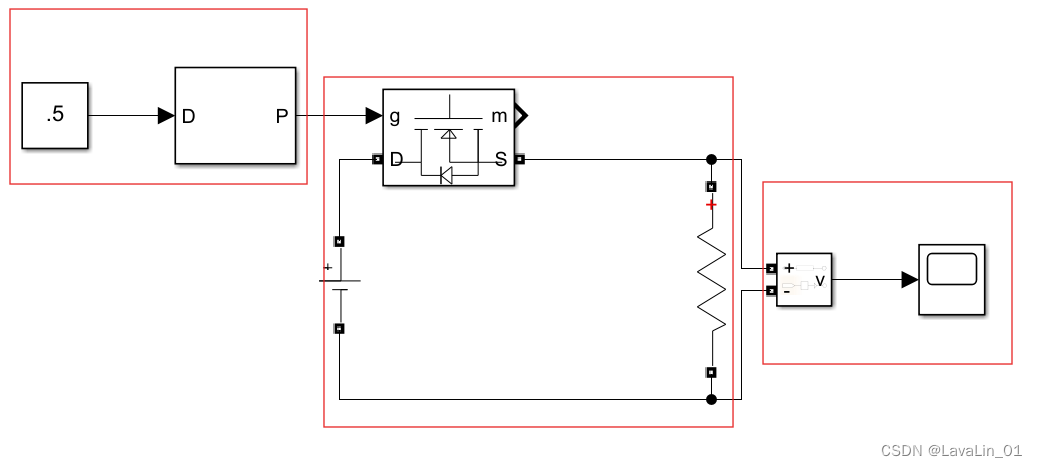 左边是一个占空比50%的PWM控制MOS的导通和关断,电源12V、50%的占空比等效于6V的电压,通过示波器测得的电压波形如下。
左边是一个占空比50%的PWM控制MOS的导通和关断,电源12V、50%的占空比等效于6V的电压,通过示波器测得的电压波形如下。
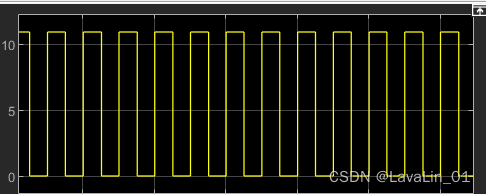
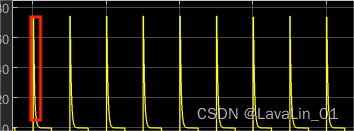
从波形我们可以看到这个是一个上下跳变的电压,为了得到一个稳定的电压,我们加入电容进行滤波。
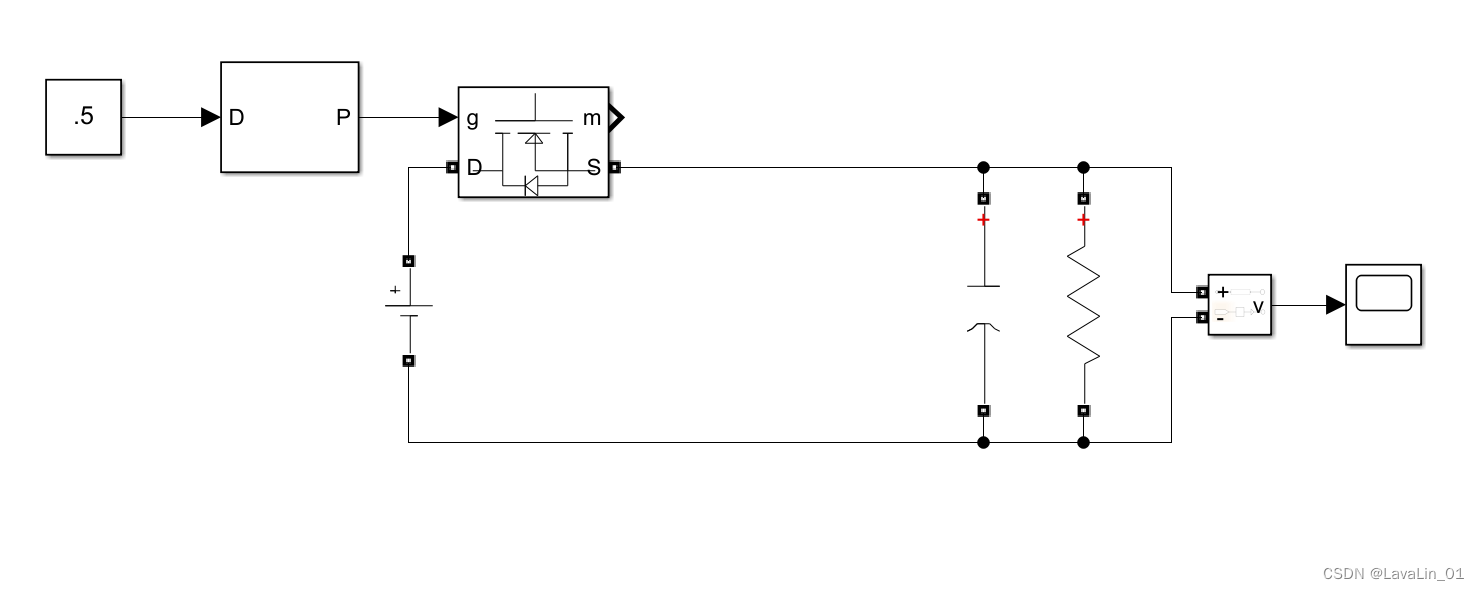

测定的波形,没有到达我们想象的效果,并不是一个相对平缓的直线。原因是在上图中标记的位置,电压突变导致,根据I = C*du/dt,u瞬时增大,I趋近无线大。也是就是下图电流波形标注的位置。
我们加入电感来抑制这个电流,由于电感的电流是不能突变的,可以通过加入二极管来续流。
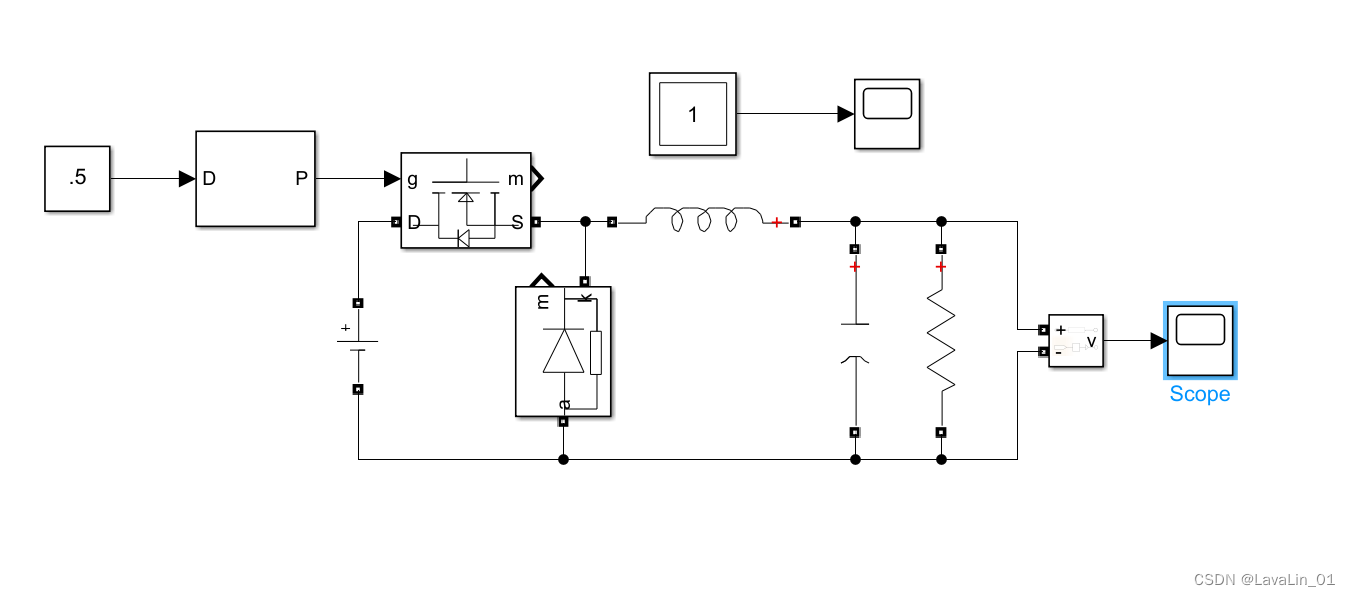
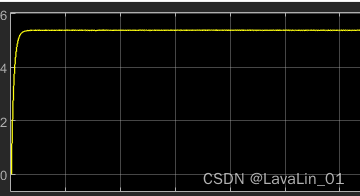
这样我们就可以得到一个稳定的电压。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









