






 本文讨论了解决物理布料模拟中拉伸约束问题的方法,涉及显式和隐式积分的挑战,以及使用PBD(PositionBasedDynamics)技术,如高斯-赛德尔和雅各布方法,同时强调了在大形变和稳定性之间的权衡。文章还介绍了如何通过限制模拟过程中的弹性系数来提高计算效率和模拟的物理意义。
本文讨论了解决物理布料模拟中拉伸约束问题的方法,涉及显式和隐式积分的挑战,以及使用PBD(PositionBasedDynamics)技术,如高斯-赛德尔和雅各布方法,同时强调了在大形变和稳定性之间的权衡。文章还介绍了如何通过限制模拟过程中的弹性系数来提高计算效率和模拟的物理意义。
约束想解决的问题:
在现实世界中,很多的布料对于拉伸有很强的约束作用,但在模拟中如果将弹簧系数K调的很大,会造成问题
1.显式积分中,模型会不稳定
2.隐式积分中,会造成ill_conditioned
问题可以解决,比如说更小的时间步长或者更多次的迭代,但这些解决方法都会带来很大的计算量,花更多的时间
因此使用约束是想要在弹簧系数很大的时候,如何减少模拟所花费的计算量和时间
约束1.拉伸约束
对于一根弹簧可以有弹簧的长度等于原长,可以得到一个约束
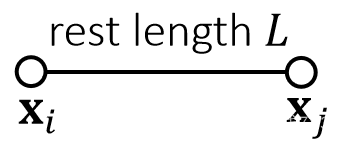
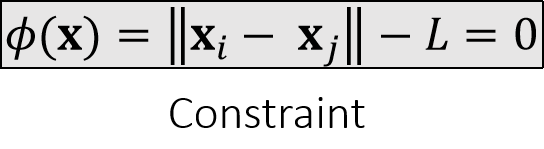
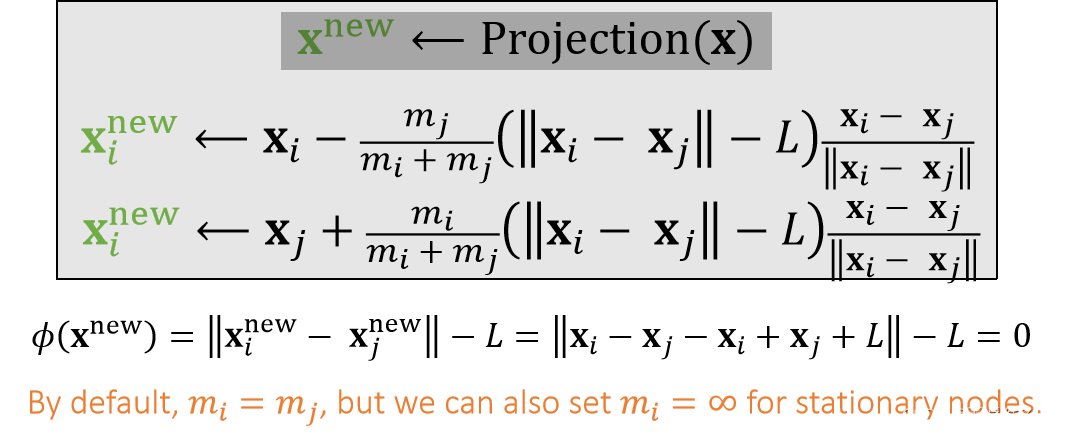
因此我们可以构造一个函数,使得弹簧长度始终为原长,拉伸状态下,需要减少长度,压缩转态下,需要扩大长度,可以得到两个顶点新的位置
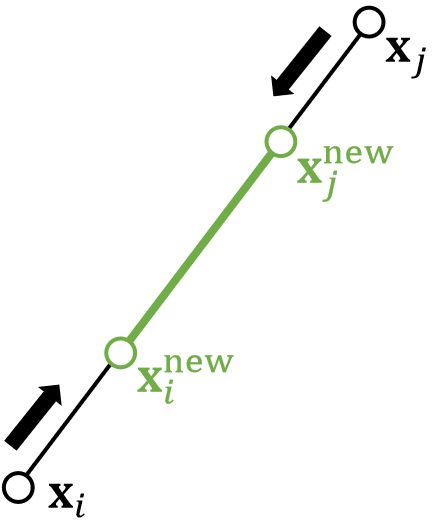
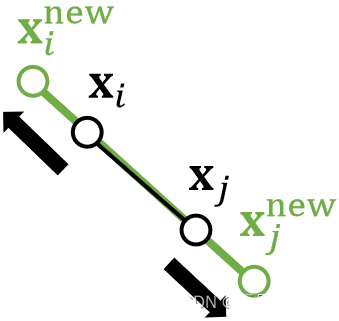
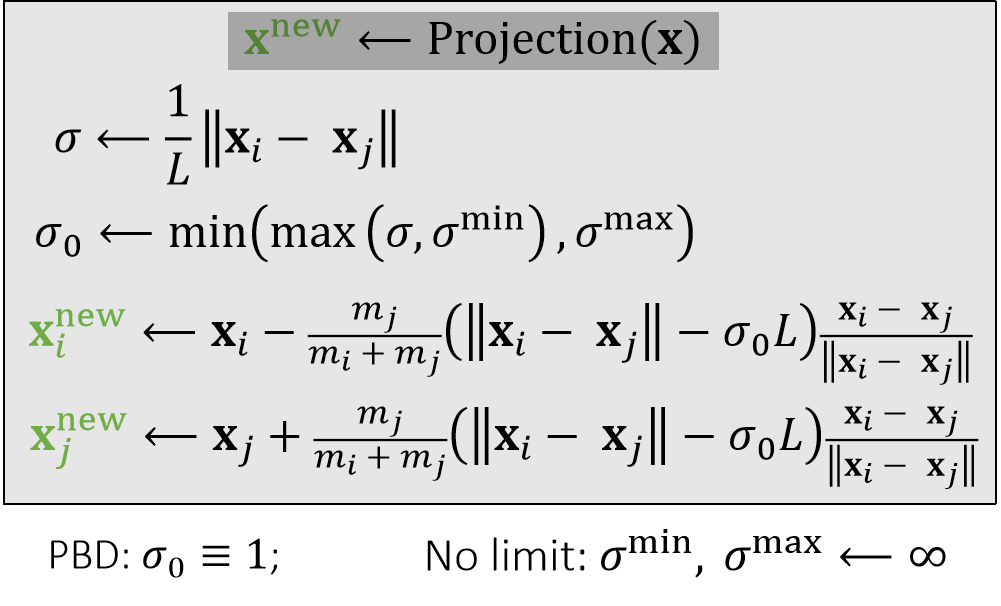
这个问题可以是一个投影问题,若是在高纬空间里面,我们需要做的就是保证x的位置在合理区域里面,挪动的距离还要尽可能少
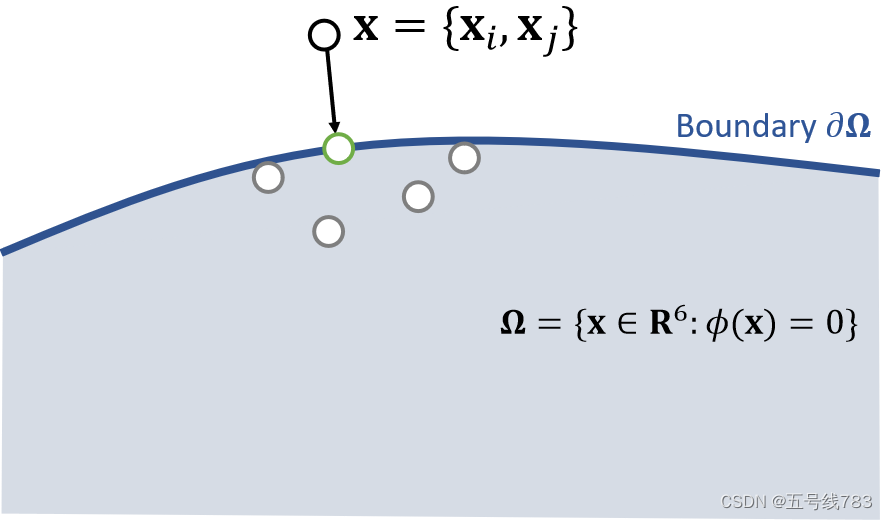
有

具体推导函数来自论文,作为结论使用(这个推导较为容易,质心不变为前提,质量和挪动的量相关,质量一般在模拟的时候都设置为1,若是固定点,就设置为无穷大(当然可以直接不更新))
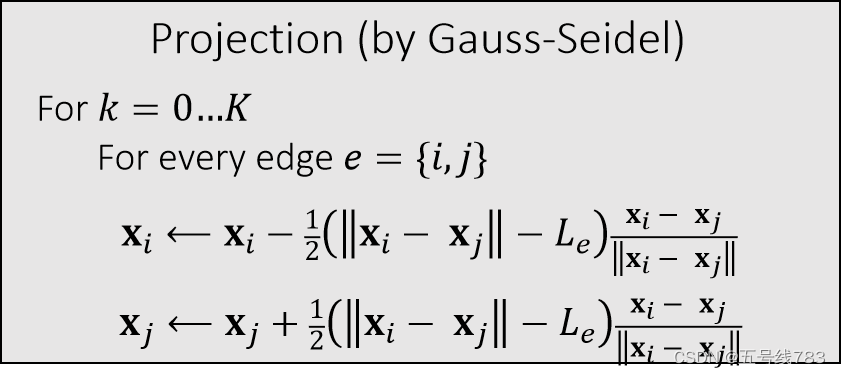
多弹簧(高斯—赛德尔方法),就是一根一根的处理这些弹簧,每处理一根,另外的也会变化,也就是需要不断迭代运算(方法很好理解,但名字很高大上。。。)
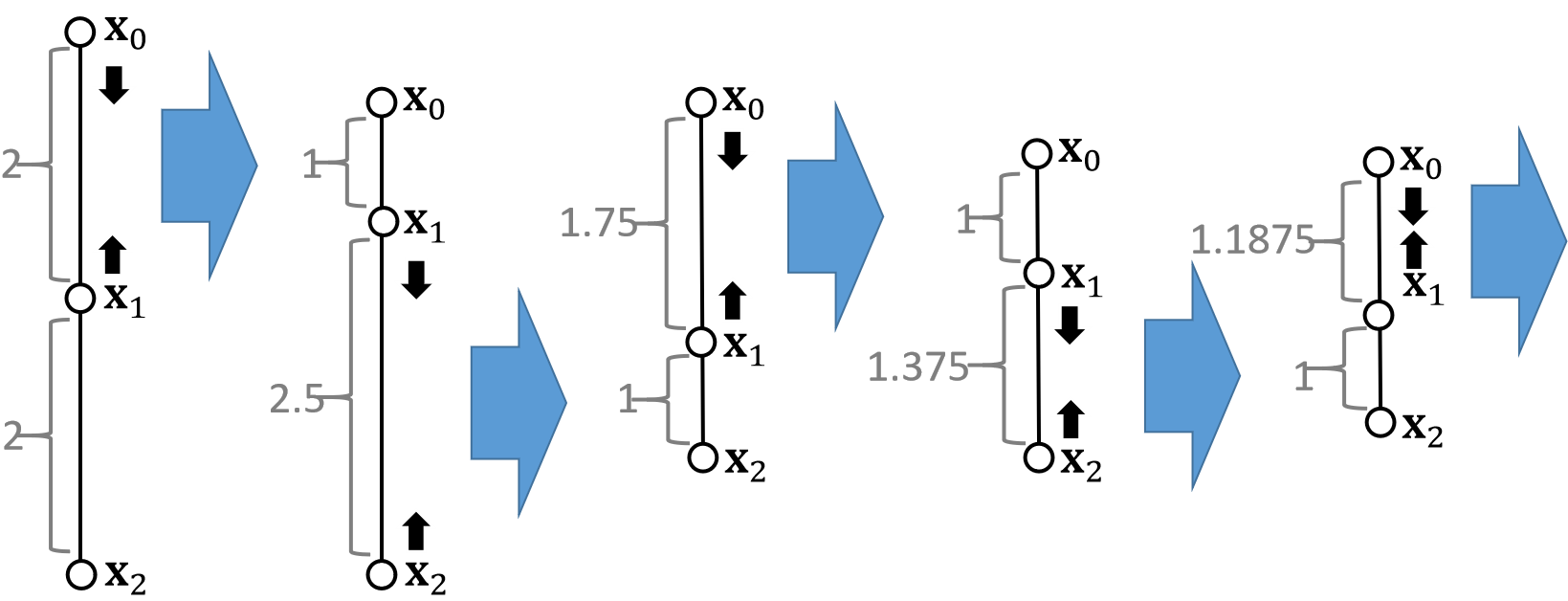
这个方法虽然容易,但是变形是和边的顺序是有关的,会有偏向性而且会影响收敛的速度,而且不管怎么做,总会有不收敛的边虽然这个方法叫做高斯-赛德尔方法,但事实上更像机器学习的梯度下降,只不过有方向
多弹簧(雅各布方法 jacobi)
减少边的顺序造成的影响,可以进行一些并行的计算,并行计算比高斯法更容易一些
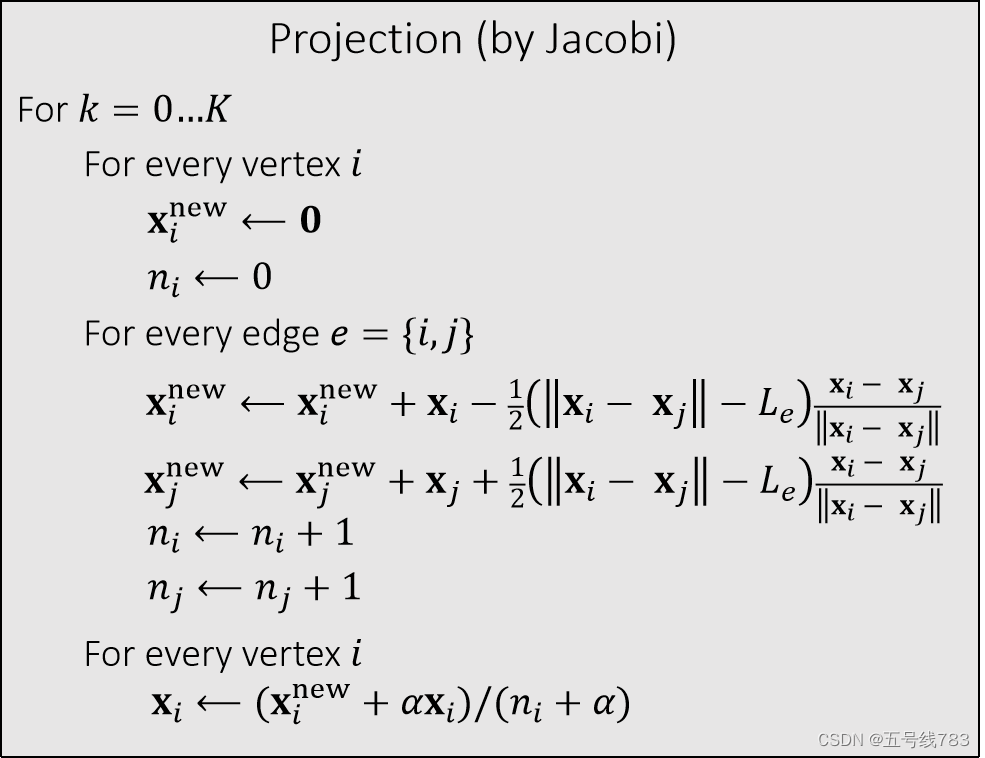
但我每次计算更新时,先保存下来,有很多的更新值,我最后做一个类似取平均值的加权计算,得到一个总的更新,收敛的速度上会慢一些
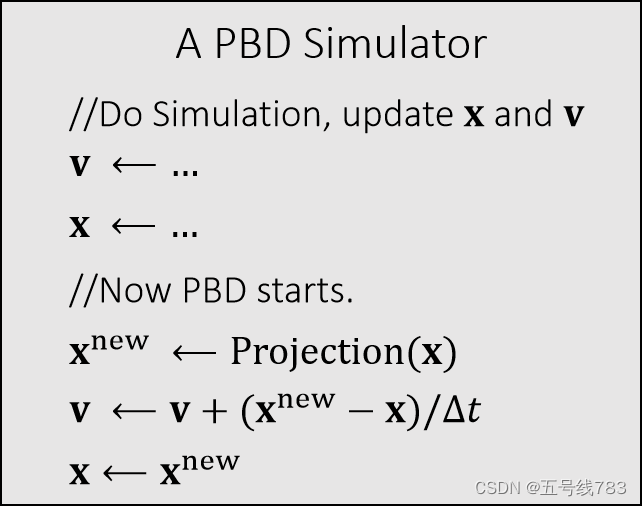
基于上面的方法,可以做PBD模拟
第一步:先做简单的自由活动的位置更新,更新速度和位置
第二步:开始施加约束,
1.对顶点位置做约束
2.根据新位置,我们可以对速度做新的计算
3.最后,将原来的位置覆盖掉
这个方法的问题在于,这个模拟过程中只注重了视觉的表达,但实际上并未涉及到什么物理的方法,并没有什么弹性系数等等东西
在这种模拟方法中,弹性效果的体现仅仅在于通过迭代数量和网格来展现,迭代数量越少,网格数越多(因为需要更多次数的迭代才会收敛),也就越有弹性
其余的约束还有体积约束,能量约束等
缺点是没有什么物理含义,而且在高分辨率网格上效率下降很快,实时低精度模拟套路
Muller. 2008. Hierarchical Position Based Dynamics. VRIPHYS.
为了使得PBD具有物理含义,我们可以这样做,前面的位置速度更新,我们使用正常的物理方法,只是使用后面的约束提高其稳定性
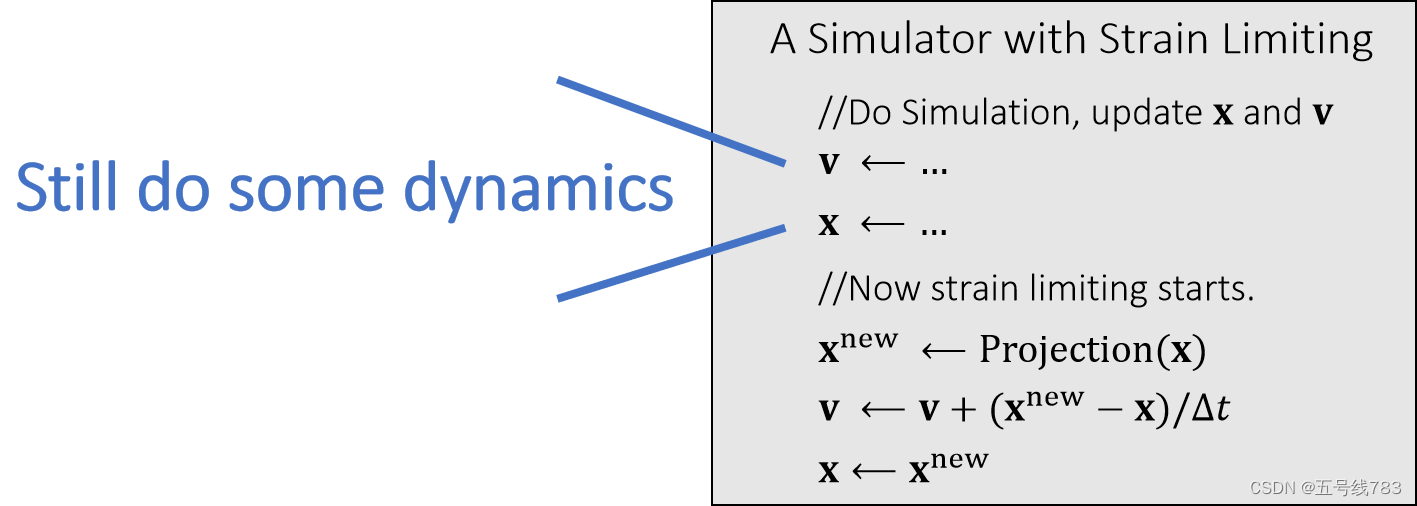
此时,后面的约束只是用来保证模拟的稳定,解决抖动问题
例如说对于一阶弹簧,我们可以定义拉伸比例

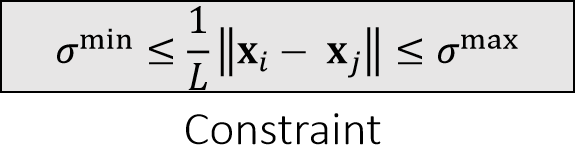
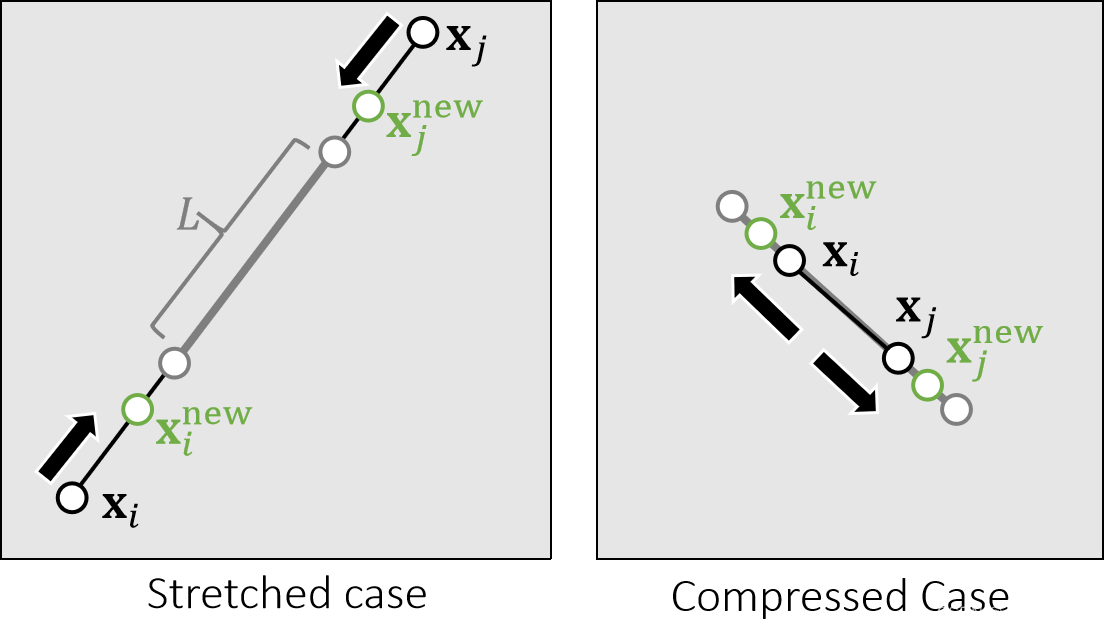
我希望靠近满足比例,意思就是将约束放宽的PBD
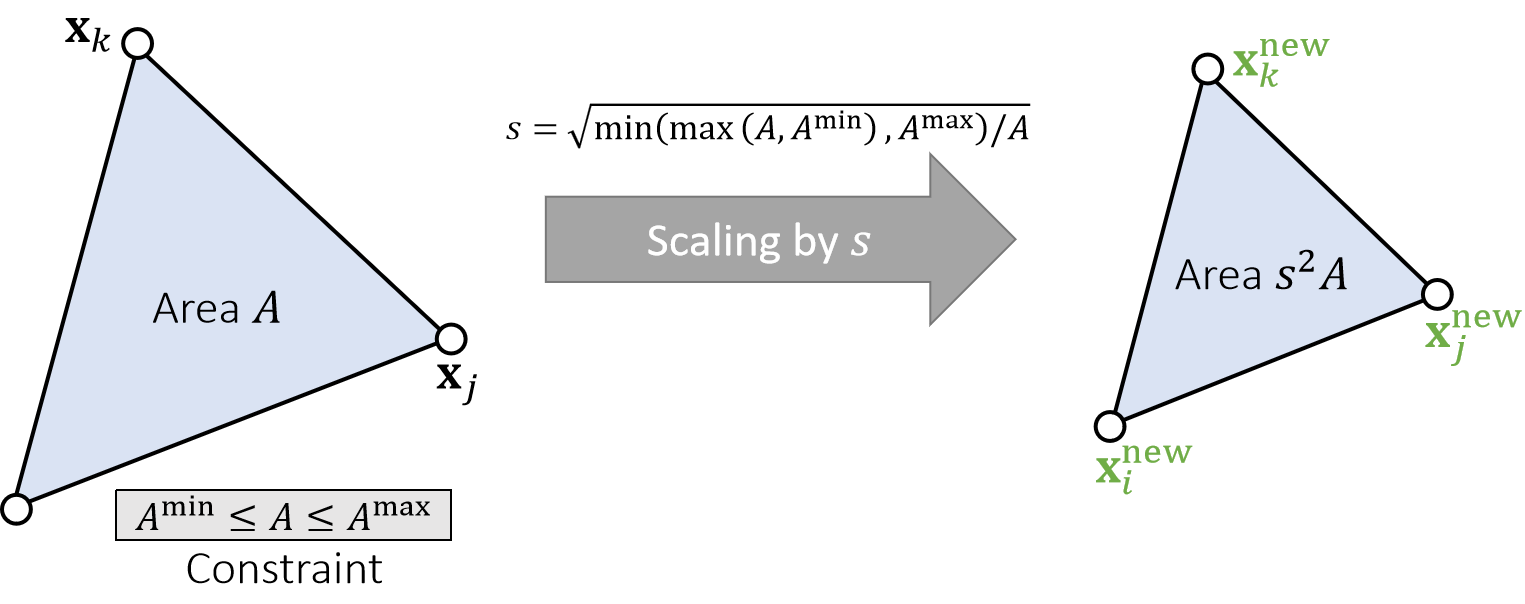
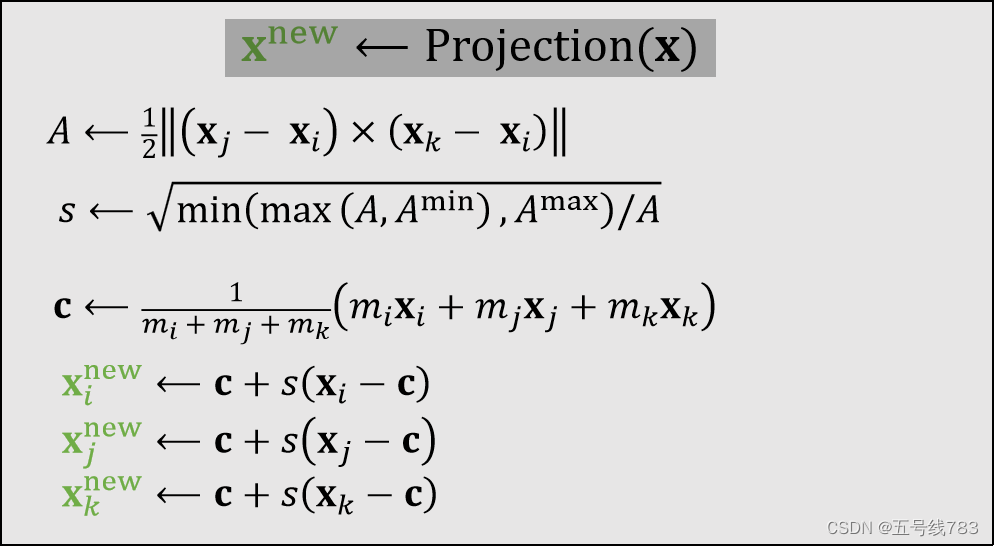
三角形面积约束:
也可以约束三角形面积的大小,实际操作起来的话计算一个缩放比就可以了

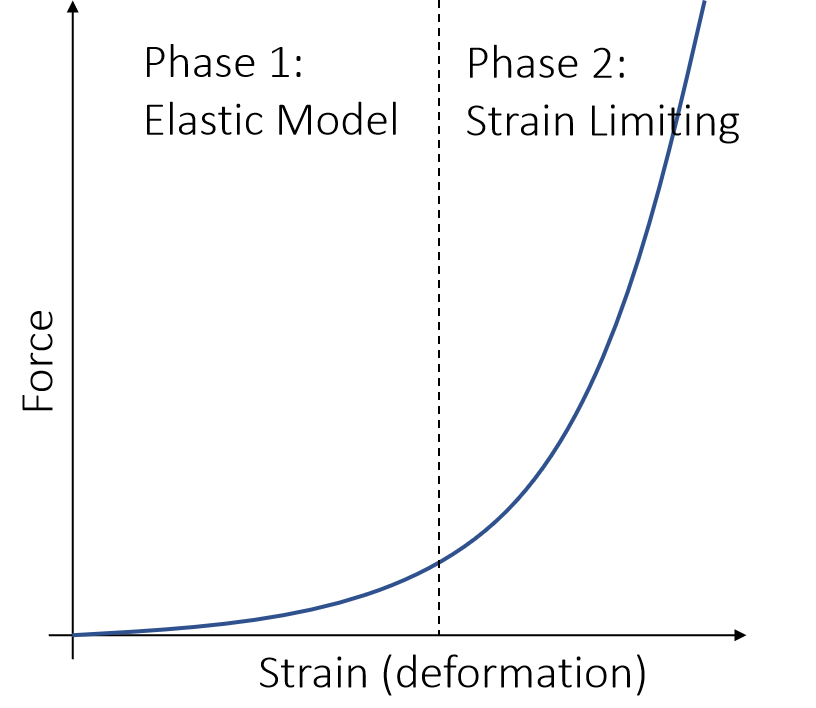
有稳定性的问题(大形变),模拟非线性的表现,可以在比较小的阶段使用物理模拟,在形变比较大的阶段使用约束限制,,解决锁死问题
PBD代码中的拉伸约束实现
void Strain_Limiting()
{
Mesh mesh = GetComponent<MeshFilter>().mesh;
Vector3[] vertices = mesh.vertices;
Vector3[] sum_x = new Vector3[vertices.Length];
int[] sum_n = new int[vertices.Length];
//Apply PBD here.
for (int i = 0; i < vertices.Length; i++)
{
sum_x[i] = new Vector3(0, 0, 0);
sum_n[i] = 0;
}
for (int e = 0; e < L.Length; e++)
{
int i = E[e * 2];
int j = E[e * 2 + 1];
Vector3 xij = vertices[i] - vertices[j];
sum_x[i] = sum_x[i] + 0.5f * (vertices[i] + vertices[j] + L[e] * xij * (1.0f / xij.magnitude));
sum_x[j] = sum_x[j] + 0.5f * (vertices[i] + vertices[j] - L[e] * xij * (1.0f / xij.magnitude));
sum_n[i]++;
sum_n[j]++;
}
for (int i = 0; i < vertices.Length; i++)
{
if (i == 0 || i == 20) continue;
V[i] = V[i] + (1.0f / t) * ((0.2f * vertices[i] + sum_x[i]) / (0.2f + (float)sum_n[i]) - vertices[i]);
vertices[i] = (0.2f * vertices[i] + sum_x[i]) / (0.2f + (float)sum_n[i]);
}
mesh.vertices = vertices;
}代码逻辑为
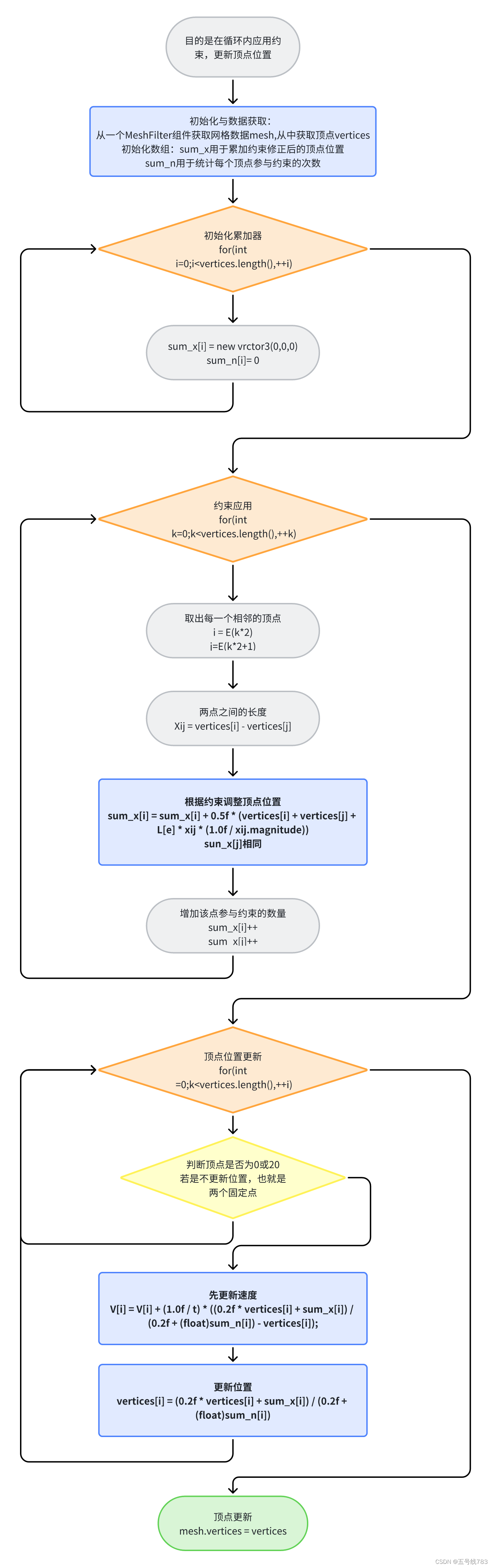
比较直观,根据伪代码一步一步执行即可
完整代码如下所示
public class PBD_model : MonoBehaviour
{
float t = 0.0333f;
float damping = 0.99f;
int[] E;
float[] L;
Vector3[] V;
Vector3 gravity = new Vector3(0, -9.8f, 0);
// Use this for initialization
void Start()
{
Mesh mesh = GetComponent<MeshFilter>().mesh;
//Resize the mesh.
int n = 21;
Vector3[] X = new Vector3[n * n];
Vector2[] UV = new Vector2[n * n];
int[] T = new int[(n - 1) * (n - 1) * 6];
for (int j = 0; j < n; j++)
for (int i = 0; i < n; i++)
{
X[j * n + i] = new Vector3(5 - 10.0f * i / (n - 1), 0, 5 - 10.0f * j / (n - 1));
UV[j * n + i] = new Vector3(i / (n - 1.0f), j / (n - 1.0f));
}
int t = 0;
for (int j = 0; j < n - 1; j++)
for (int i = 0; i < n - 1; i++)
{
T[t * 6 + 0] = j * n + i;
T[t * 6 + 1] = j * n + i + 1;
T[t * 6 + 2] = (j + 1) * n + i + 1;
T[t * 6 + 3] = j * n + i;
T[t * 6 + 4] = (j + 1) * n + i + 1;
T[t * 6 + 5] = (j + 1) * n + i;
t++;
}
mesh.vertices = X;
mesh.triangles = T;
mesh.uv = UV;
mesh.RecalculateNormals();
//Construct the original edge list
int[] _E = new int[T.Length * 2];
for (int i = 0; i < T.Length; i += 3)
{
_E[i * 2 + 0] = T[i + 0];
_E[i * 2 + 1] = T[i + 1];
_E[i * 2 + 2] = T[i + 1];
_E[i * 2 + 3] = T[i + 2];
_E[i * 2 + 4] = T[i + 2];
_E[i * 2 + 5] = T[i + 0];
}
//Reorder the original edge list
//Guarantee smaller index in front of bigger one
for (int i = 0; i < _E.Length; i += 2)
if (_E[i] > _E[i + 1])
Swap(ref _E[i], ref _E[i + 1]);
//Sort the original edge list using quicksort
Quick_Sort(ref _E, 0, _E.Length / 2 - 1);
int e_number = 0;
for (int i = 0; i < _E.Length; i += 2)
if (i == 0 || _E[i + 0] != _E[i - 2] || _E[i + 1] != _E[i - 1])
e_number++;
E = new int[e_number * 2];
for (int i = 0, e = 0; i < _E.Length; i += 2)
if (i == 0 || _E[i + 0] != _E[i - 2] || _E[i + 1] != _E[i - 1])
{
E[e * 2 + 0] = _E[i + 0];
E[e * 2 + 1] = _E[i + 1];
e++;
}
L = new float[E.Length / 2];
for (int e = 0; e < E.Length / 2; e++)
{
int i = E[e * 2 + 0];
int j = E[e * 2 + 1];
L[e] = (X[i] - X[j]).magnitude;
}
V = new Vector3[X.Length];
for (int i = 0; i < X.Length; i++)
V[i] = new Vector3(0, 0, 0);
}
void Quick_Sort(ref int[] a, int l, int r)
{
int j;
if (l < r)
{
j = Quick_Sort_Partition(ref a, l, r);
Quick_Sort(ref a, l, j - 1);
Quick_Sort(ref a, j + 1, r);
}
}
int Quick_Sort_Partition(ref int[] a, int l, int r)
{
int pivot_0, pivot_1, i, j;
pivot_0 = a[l * 2 + 0];
pivot_1 = a[l * 2 + 1];
i = l;
j = r + 1;
while (true)
{
do ++i; while (i <= r && (a[i * 2] < pivot_0 || a[i * 2] == pivot_0 && a[i * 2 + 1] <= pivot_1));
do --j; while (a[j * 2] > pivot_0 || a[j * 2] == pivot_0 && a[j * 2 + 1] > pivot_1);
if (i >= j) break;
Swap(ref a[i * 2], ref a[j * 2]);
Swap(ref a[i * 2 + 1], ref a[j * 2 + 1]);
}
Swap(ref a[l * 2 + 0], ref a[j * 2 + 0]);
Swap(ref a[l * 2 + 1], ref a[j * 2 + 1]);
return j;
}
void Swap(ref int a, ref int b)
{
int temp = a;
a = b;
b = temp;
}
void Strain_Limiting()
{
Mesh mesh = GetComponent<MeshFilter>().mesh;
Vector3[] vertices = mesh.vertices;
Vector3[] sum_x = new Vector3[vertices.Length];
int[] sum_n = new int[vertices.Length];
//Apply PBD here.
for (int i = 0; i < vertices.Length; i++)
{
sum_x[i] = new Vector3(0, 0, 0);
sum_n[i] = 0;
}
for (int e = 0; e < L.Length; e++)
{
int i = E[e * 2];
int j = E[e * 2 + 1];
Vector3 xij = vertices[i] - vertices[j];
sum_x[i] = sum_x[i] + 0.5f * (vertices[i] + vertices[j] + L[e] * xij * (1.0f / xij.magnitude));
sum_x[j] = sum_x[j] + 0.5f * (vertices[i] + vertices[j] - L[e] * xij * (1.0f / xij.magnitude));
sum_n[i]++;
sum_n[j]++;
}
for (int i = 0; i < vertices.Length; i++)
{
if (i == 0 || i == 20) continue;
V[i] = V[i] + (1.0f / t) * ((0.2f * vertices[i] + sum_x[i]) / (0.2f + (float)sum_n[i]) - vertices[i]);
vertices[i] = (0.2f * vertices[i] + sum_x[i]) / (0.2f + (float)sum_n[i]);
}
mesh.vertices = vertices;
}
void Collision_Handling()
{
Mesh mesh = GetComponent<MeshFilter>().mesh;
Vector3[] X = mesh.vertices;
//For every vertex, detect collision and apply impulse if needed.
float radius = 2.7f;
GameObject sphere = GameObject.Find("Sphere");
Vector3 center = sphere.transform.position;
for (int i = 0; i < X.Length; i++)
{
if (i == 0 || i == 20)
continue;
Vector3 d = X[i] - center;
if (d.magnitude < radius)
{
Vector3 A = center + radius * d.normalized;
V[i] = V[i] + (A - X[i]) / t;
X[i] = A;
}
}
mesh.vertices = X;
}
// Update is called once per frame
void Update()
{
Mesh mesh = GetComponent<MeshFilter>().mesh;
Vector3[] X = mesh.vertices;
for (int i = 0; i < X.Length; i++)
{
if (i == 0 || i == 20) continue;
//Initial Setup
V[i] = V[i] * damping;
V[i] = V[i] + gravity * t;
X[i] = X[i] + V[i] * t;
}
mesh.vertices = X;
for (int l = 0; l < 32; l++)
Strain_Limiting();
Collision_Handling();
mesh.RecalculateNormals();
}
}

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









