






一.配置LED,KEY的IO口
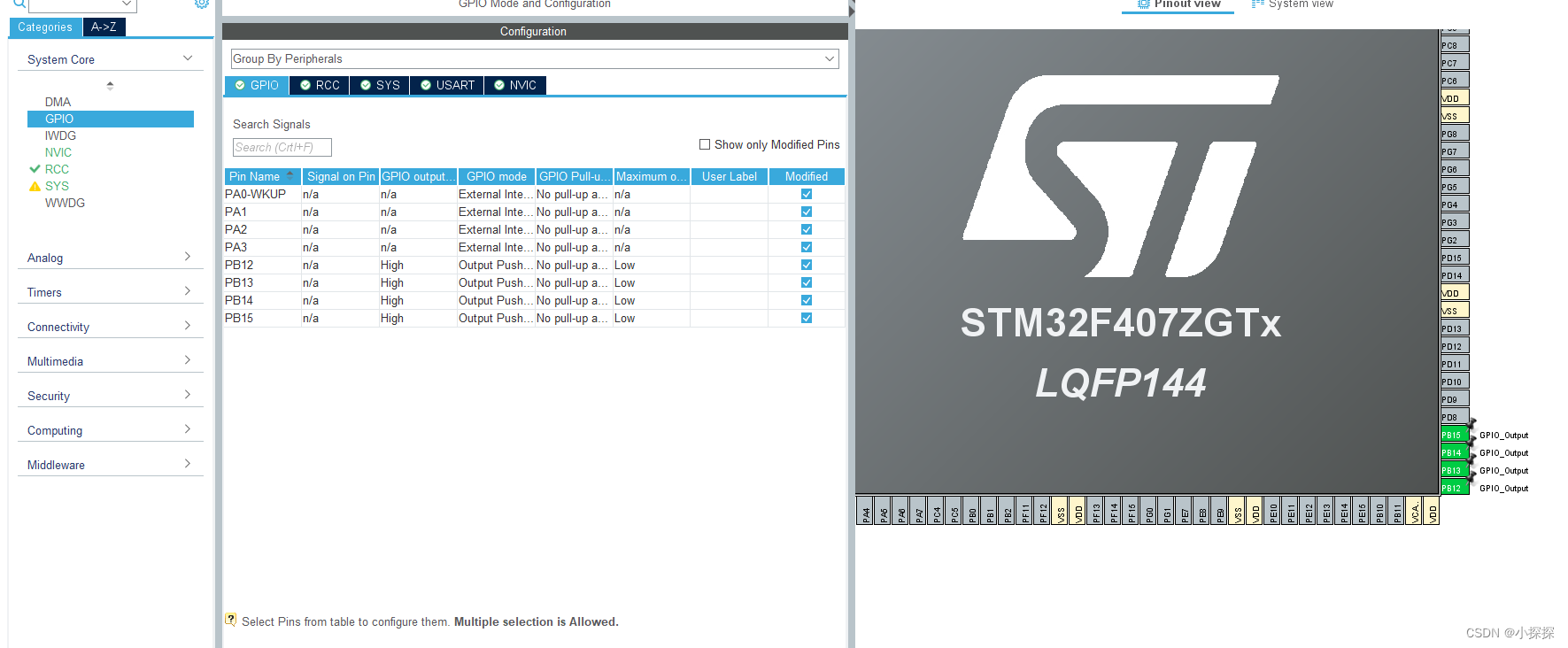
二.配置管理GPIO设备对象
#ifndef __CONFIG_H
#define __CONFIG_H
/*大总管*/
#define USE_GPIO_DEVICE (1)
#define USE_UART_DEVICE (1)
/*管理自定义库是否使用*/
#define USE_PRINTF_LIB (1)
#define USE_RINGBUFFER_LIB (1)#endif
#ifndef __DEVICES_H
#define __DEVICES_H/**/
#include "config.h"#if USE_GPIO_DEVICE
#include "dev_gpio.h"
#define USE_GPIO_DRIVER
#endif
#if USE_UART_DEVICE
#include "dev_uart.h"
#define USE_UART_DRIVER
#endif//#if USE_RINGBUFFER_LIB
// #include "ring_buffer.h"
// #define USE_RINGBUFFER_LIB
//#endif#endif
三.封装设备对象
#ifndef __DEV_GPIO_H
#define __DEV_GPIO_H//描述设备对象的结构体
typedef struct GPIODev{
char *name;
void *port;
unsigned int pin;
unsigned char value;
int(*Init)(struct GPIODev *PDev);
int(*Write)(struct GPIODev *PDev,unsigned char status);
int(*Read)(struct GPIODev *PDev);
struct GPIODev *next;}GPIODevice;
GPIODevice *IODeviceFind(const char *name);
void IODeviceInsert(GPIODevice *PData);
void IODevReigest(void);
#endif
#include "stm32f4xx_hal.h" // Device header
#include "./drv_config/gpio_config.h"
#include "dev_gpio.h"
#include "drivers.h"
#include "string.h"
struct GPIODev *PHead=NULL;
void IODevReigest(void)
{
GPIODeviceCreate();
}
void IODeviceInsert(GPIODevice *PData)
{
if(NULL==PHead)
{
PHead=PData;
}
else
{
PData->next=PHead;
PHead=PData;
}
}GPIODevice *IODeviceFind(const char *name)/*因为查找到一个对象返回的是他的地址(z指针),用const char 修饰传递过来的值,防止值被意外的改变*/
{
GPIODevice *p=PHead;
while(NULL!=p)
{
if(strstr(p->name,name))
{
return p;
}
p=p->next;
}
return NULL;
}
四.定义设备对象。
#define D1 \
{ \
.name = "D1", \
.port = GPIOB, \
.pin = GPIO_PIN_12, \
.Init = GPIODroveInit, \
.Wrint = GPIODriveWrint, \
.Read = GPIODriveRead, \
.next = NULL \
}//其余的类似
五.编写设备驱动
static RingBuffer *gK1Buffer = NULL;
static RingBuffer *gK2Buffer = NULL;
static RingBuffer *gK3Buffer = NULL;
static RingBuffer *gK4Buffer = NULL;//创建唤醒缓冲区static GPIODevice gGPIODev[]=
{
D1,D2,D3,D4,K1,K2,K3,K4};
static void GPIODevCleare(void)
{
unsigned int num=sizeof(gGPIODev)/sizeof(GPIODevice);
for(int i=0;i<num;i++)
{
IODeviceInsert(&gGPIODev[i]);
}}
/*初始化圆形缓冲区,如果成功返回0,失败返回EIO*/
static int GPIODroveInit(struct GPIODev *Pdev)
{
if(NULL==Pdev)
{
return -EINVAL;
}
if(strstr(Pdev->name,"K1"))
{
gK1Buffer=RingBufferNew(sizeof(unsigned char)*10);
if(NULL==gK1Buffer) return -EIO;
}
else if(strstr(Pdev->name,"K2"))
{
gK2Buffer=RingBufferNew(sizeof(unsigned char)*10);
if(NULL==gK2Buffer) return -EIO;
}
else if(strstr(Pdev->name,"K3"))
{
gK3Buffer=RingBufferNew(sizeof(unsigned char)*10);
if(NULL==gK3Buffer) return -EIO;
}
else if(strstr(Pdev->name,"K4"))
{
gK4Buffer=RingBufferNew(sizeof(unsigned char)*10);
if(NULL==gK4Buffer) return -EIO;
}
return ESUCCESS;
}
/*重写中断回调函数,驱动中断回调函数保存键值,保存到环形缓冲区内*/
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
switch(GPIO_Pin)//pin_0==k1
{
case GPIO_PIN_0:
{
GPIO_PinState status=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
if(NULL!=gK1Buffer)
{
/*将读出的状态保存到BUFF里面*/
gK1Buffer->Write(gK1Buffer,(unsigned char *)&status,1);
}
break;
}
case GPIO_PIN_1:
{
GPIO_PinState status=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1);
if(NULL!=gK2Buffer)
{
gK2Buffer->Write(gK2Buffer,(unsigned char *)&status,1);
}
break;
}
case GPIO_PIN_2:
{
GPIO_PinState status=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_2);
if(NULL!=gK3Buffer)
{
gK3Buffer->Write(gK3Buffer,(unsigned char *)&status,1);
}
break;
}
case GPIO_PIN_4:
{
GPIO_PinState status=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_3);
if(NULL!=gK4Buffer)
{
gK4Buffer->Write(gK4Buffer,(unsigned char *)&status,1);
}
break;
}
default :break;
}
}
/*读取按键的状态值(读取圆形缓冲区的里的数据)*/
static int GPIODrvIrqRead(struct GPIODev *ptdev)
{
if(NULL==ptdev)
{
return -EINVAL;
}
if(strstr(ptdev->name,"K1"))
{
if(NULL!=gK1Buffer)
{ /* Value 里面保存的是读取的值*/
int ret=gK1Buffer->Read(gK1Buffer,(unsigned char *)&ptdev->value,1);
if(ret!=1) return -EIO;
}
}
else if(strstr(ptdev->name,"K2"))
{
if(NULL!=gK2Buffer)
{
int ret=gK2Buffer->Read(gK2Buffer,(unsigned char *)&ptdev->value,1);
if(ret!=1) return -EIO;
}
}
else if(strstr(ptdev->name,"K3"))
{
if(NULL!=gK3Buffer)
{
int ret=gK3Buffer->Read(gK3Buffer,(unsigned char *)&ptdev->value,1);
if(ret!=1) return -EIO;
}
}
else if(strstr(ptdev->name,"K4"))
{
if(NULL!=gK4Buffer)
{
int ret=gK4Buffer->Read(gK4Buffer,(unsigned char *)&ptdev->value,1);
if(ret!=1) return -EIO;
}
}return ESUCCESS;
}
static int GPIODriveWrint(struct GPIODev *Pdev,unsigned char status)
{
if(NULL==Pdev) return -EIO;
if(status!=1&&status!=0)
return -EIO;
HAL_GPIO_WritePin(Pdev->port,Pdev->pin,status);
Pdev->value=status;
return ESUCCESS;
}
static int GPIODriveRead(struct GPIODev *pdev)
{
if(NULL==pdev) return -EIO;
pdev->value=HAL_GPIO_ReadPin(pdev->port,pdev->pin);
return ESUCCESS;
}
六。编写测试函数
#include "devices.h"
#include "stm32f4xx_hal.h" // Device header
#include "error.h"
void App_key_test(void)
{
IODevReigest();
GPIODevice *PK1=IODeviceFind("K1");
if(NULL==PK1) return ;
GPIODevice *PD1=IODeviceFind("D1");
if(NULL==PD1) return ;
if(PK1->Init(PK1)!=ESUCCESS) return ;
if(PD1->Init(PD1)!=ESUCCESS) return ;while(1)
{
int status=PK1->Read(PK1);
if(ESUCCESS==status)
PD1->Wrint(PD1,PK1->value);
}
}
至此就可以喽















 145
145











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









