







工业相机为了传输效率和数据的真实性,很多都是用Raw格式,比如从某宝购买的这台JHEM203GC的相机,就只支持Bayer RG8, Bayer RG10数据。
1 Bayer图像
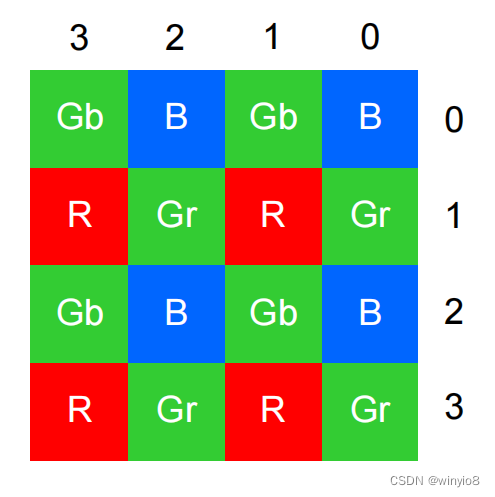
Bayer图像是彩色Bayer传感器产生的图像数据, 这种传感器每个像素只记录了红,绿,蓝一个分量的数据,如下图所示,按照排列方式分为RGGB,BGGR, GRBG, GBRG四种排列。
对相机返回的这种Bayer数据,如果需要显示为正常的彩色图像,需要将每个像素丢失的信息插补回来,一般是利用相邻和附近的像素信息进行插值,有许多不同的算法得到的效果也不尽相同。
2 图像转RGB或者BGR
如调用MVS SDK,可以通过MV_CC_ConvertPixelType实现,代码如下,转换的格式通常为PixelType_Gvsp_BGR8_Packed,就是BGR排列,如果是RGB排列,使用PixelType_Gvsp_RGB8_Packed,这种格式保存为图片或者显示时可能会出现红蓝对调的情况。
int Bayer2BGR(void *handle, unsigned char* pData, MV_FRAME_OUT_INFO_EX* pstImageInfo, unsigned char **pBgrData)
{
*pBgrData = 0;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 390
390

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









