



智能家居防盗系统:一种用于近实时监控和智能家居安全的健康协议新方法
摘要
提出的研究方法旨在设计一个可普遍实施的框架,以便在发生正在进行的盗窃(对其场所的未授权访问)时,向房主/成员提供即时通知。为此,对现有系统进行了严格分析,以识别研究空白。发现现有系统存在的问题是:只能在盗窃发生后识别入侵者,或无法区分人类与非人类物体。无线传感器网络(WSNs)结合物联网(IoT)和认知物联网的应用,正在扩展智能家居概念及其解决方案。当前研究提出了一种新型智能家居防盗系统,能够检测到入侵者,即使其使用衣物、皮革、纤维或塑料材料部分或完全遮挡面部。所提出的系统还能利用不具备夜视功能的闭路电视摄像头在黑暗中检测入侵者。该系统的基本理念是设计一种经济高效系统,使个人能够实时检测任何类型的盗窃行为,并向房主提供即时通知。该系统还承诺实现具备大规模视频数据处理能力的实时家庭安全。调查结果验证了所提出系统的成功。在入侵者未遮挡面部、部分遮挡面部、完全遮挡面部以及在黑暗中被检测到的场景下,系统准确率分别从85%、64.13%、56.70%和44.01%提升至97.01%、84.13、78.19%和66.5%。
关键词 :智能防盗系统;入侵检测;无人监管活动监测;智能家居;部分/完全遮挡的面部
1. 引言与相关工作
在现代,安全与监控是重要的问题。近期发生的盗窃/恐怖主义事件凸显了对高效视频监控以及向房主和其他家庭成员发出正在进行的盗窃现场通知的迫切需求。目前市场上已有多种监控解决方案,例如闭路电视摄像头和数字视频录像机(DVR),它们能够记录闯入者的未经授权活动,但无法区分人类与非人类物体[1,2]。近年来,由于缺乏意识不足以及智能设备的可用性较低。当入侵者使用塑料、皮革或织物等材料部分或完全遮挡面部时,人脸检测和入侵者识别任务变得非常困难。
传统系统无法向房主提供实时盗窃通知,也无法检测部分或完全遮挡的面部。对于没有夜视功能的闭路电视摄像头而言,旧系统在黑暗中检测入侵者也存在困难。这种安排的主要缺陷在于,它要求房主或家庭成员全天候可用,或进行人工视频监控,而这几乎是不可能的[3–5]。此外,在可能发生盗窃后逐一查看所有录制的视频片段是一项繁琐的任务。存储服务器中可能包含大量家庭成员影像,这些影像在识别侵入者时毫无用处。
本文内容安排如下。第一部分介绍了传统系统、潜在问题及其对社会的影响。第2节阐述了当前研究的必要性,并描述了系统利用图形和统计方法检测遮挡面部的智能功能。接着,第3节介绍了系统的系统设计与实验设置,同时描述了两个关键功能:(i)遮挡面部检测;(ii)黑暗中的入侵者检测。第4节分三个阶段介绍了方法论,并结合图形分析和统计结果进行了说明。最后一节(第5节)讨论了研究成果。
(a) (b)

2. 基于物联网的新防盗系统的必要性
如今,入侵者对技术的了解日益加深,他们使用割枪、智能防盗锁系统等智能设备实施入室盗窃。对于这类入侵者而言,断开与数字视频录像机以及位于家庭内部的数据库服务器间接连接的闭路电视摄像监控变得轻而易举。因此,有必要改进现有系统[5–27],并提出一种智能方法,该方法不仅能够提供无监督的人类活动监测,还能在盗窃正在进行时尽早通知房主,从而阻止盗窃行为。所有传统系统都基于物体检测、物体运动检测和跟踪技术运行。此类系统容易产生错误警报或通知,可能导致向房主/成员发送错误的紧急通知、入侵者在盗窃后逃脱,以及对居民造成不必要的干扰。为解决这些问题,本文余下部分提出了一种新型人类活动监测检测、识别及家庭安全方法。使用术语列表见表1。
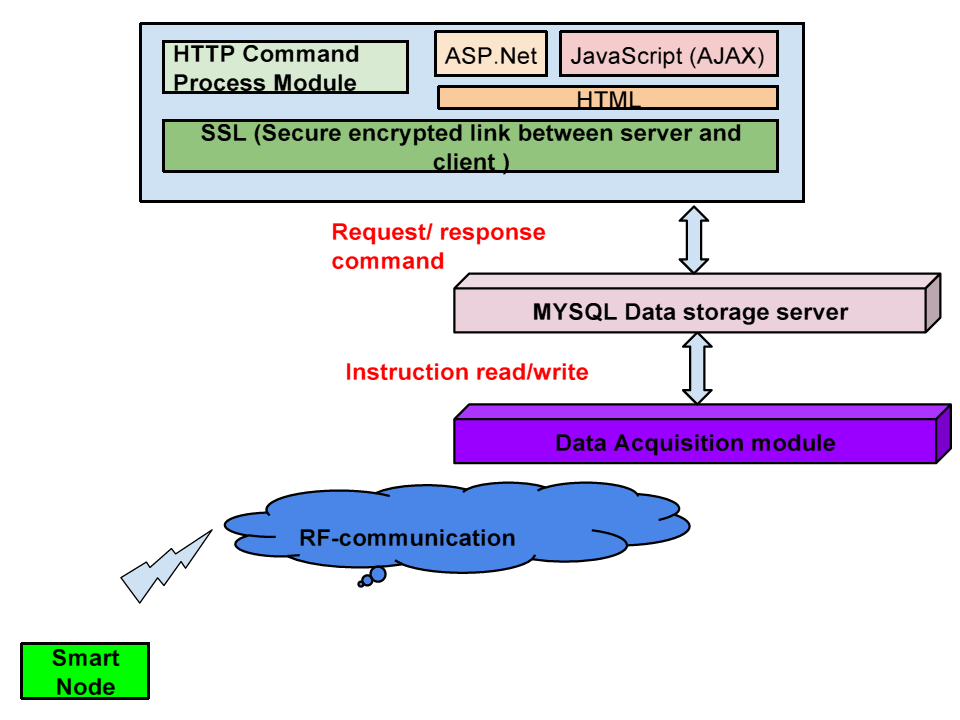
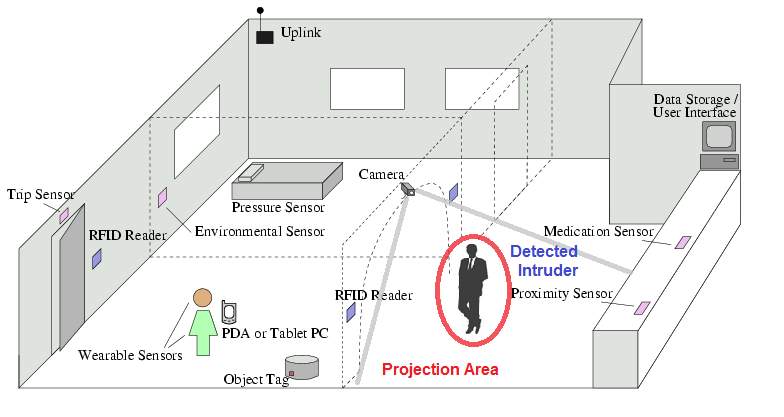
传感单元的整体布置如下。智能家居监控与控制框架应用于两个独特的层面:设备和编程。设备框架包含传感器布置。该设备框架进一步分为四个区域:体感传感器设置(BSS)、环境传感器设置(ASS)、危机传感器设置(CSS)和其他传感器设置(OSS)。BSS配备了冲击传感器。远程BSS可提供对住户在不同生理状态下的观测。BSS框架集成了生理检测装置,能够记录智能家居居民的日常活动,同时不干扰其日常生活。
第二个设备系统ASS包含温度传感单元、运动传感单元和压力传感单元。CSS配备有多个手动按钮,例如在房屋火灾等紧急情况下的紧急按钮,可激活安防和报警系统。最终设置OSS通过电气与电子传感单元实现家用电器控制和使用监测。
OSS还集成了接触传感单元。OSS框架负责将信息收集、挖掘和存储到数据库服务器中。最后,通过机器学习和信息挖掘模型对服务器信息进行收集和处理,以向网站提供有用数据并输出相应操作。
无线传感单元的布置将在下一节中介绍。
智能家居监控与控制框架自2015年5月起在一座建于1945年的老式房屋中持续运行。图1展示了智能家居监控与控制框架正在运行的房屋,以及居民在此进行日常生活的场景[12]。
3. 系统设计与实验设置
如图2所示,使用了CP‐PLUS模拟摄像头型号850tvl、支持Wi‐Fi和蓝牙的定制硬件(配备1GB内存和256GB存储卡)以及三星Grand移动设备。在智能家居的每个房间都放置了摄像头,以防止携带智能设备的入侵者。如今,入侵者通常知道摄像头会连接到笔记本电脑/计算机/平板电脑,并可能将其断开以停止系统运行。本系统所使用的定制硬件具备蓝牙和Wi‐Fi功能,使得所提出的系统可以放置在智能家居内任何有Wi‐Fi信号的地方。即使发生停电情况,只要将所提出的系统连接到带有热点互联网连接的笔记本电脑或平板电脑,系统仍可继续运行。此外,该定制硬件表面覆盖有塑料涂层,以保护其免受电线隐蔽线路内部水分的影响。


所提出的系统的核心模块的技术特性将在下文详细说明。
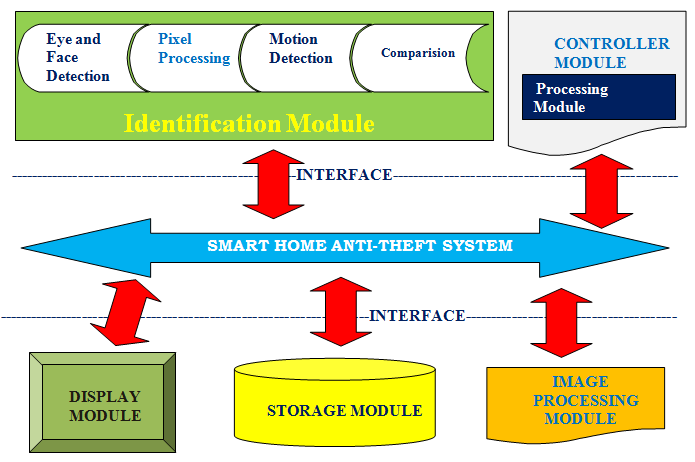
I. 功能模块/处理模块
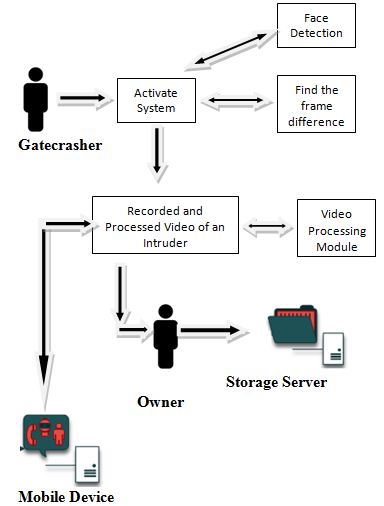
以每秒15帧的速度捕获监控区域中入侵者的存在,如图3所示。在检测到入侵者后,功能模块将捕获的帧发送至识别模块(M)进行检测和入侵者识别。
II. 识别模块
当入侵者进入监控区域时,识别模块(M)检测其存在,并通过眼部和面部检测模块(Me)评估捕获的入侵者面部的各个区域,判断其为人类或非人类。识别模块(M)包含四个子模块,如图5所示。
a. 眼部和面部检测模块
通过区分人类与非人类物体来捕获入侵者的面部。如果入侵者的面部被部分遮挡,该模块将利用像素处理模块(Mp)检测入侵者面部的最亮部分或感兴趣区域。在此过程之后,眼部和面部检测模块将被捕获的图像发送至像素处理模块进行进一步处理。
b. 增强型像素处理模块
首先,如果入侵者部分遮挡了面部,该模块会检测面部最亮区域,例如眼睛、脸颊或头部上部[28,29]。接着,它通过运动检测模块(Mm)检测被捕获的入侵者的运动。这消除了来自墙壁、杂志或报纸上印刷的人类照片所引起的误报风险。
c. 运动检测模块
如果被检测到的入侵者是人,运动检测模块将检测入侵者的动作;它以每秒15帧的速率从视频中捕获入侵者的首帧,并以每秒45帧的速率捕获后续帧。将捕获帧速率从每秒15帧提高到每秒45帧的主要目的是使房主能够在网络连接较慢的场景下访问捕获的视频序列。随后,视频被发送到比较模块(Mc),以降低误报的可能性。
d. 比较模块
为了降低误报的可能性,比较模块(Mc)使用改进的Haar级联算法[13,14]区分人类与非人类物体,并向房主/成员发送近实时通知。
III. 存储模块
该模块存储所有被捕获入侵者的图像。智能家居防盗系统在智能家居监控区域对任何未授权访问的检测与识别分为三个阶段进行:(a)初级人脸检测阶段;(b)次级人脸检测阶段;以及(c)最终阶段,即入侵者部分或完全遮挡面部或在黑暗中被检测到的情况。

4. 方法与结果分析
根据我们严格而详细的文献调查[3–40],我们发现迄今为止尚无可行的解决方案能够检测到具有部分或完全遮挡脸部的入侵者,并向房主提供即时通知以阻止正在进行的盗窃。此外,还指出,此类方法论尚未进入市场的主要原因是开发用于部分或完全遮挡脸部的入侵检测专用方法论所涉及的复杂性、效率、准确率以及所需的时间持续时间。为了克服上述挑战,我们提出了一种研究方法,旨在设计一个可普遍实施的框架,为房主/成员提供正在进行的盗窃(对其场所的未授权访问)的即时通知。该研究方法被分为三个阶段,并对应相应的结果:(a)第一阶段;(b)第二阶段;(c)最终阶段。
4.1. 第一阶段
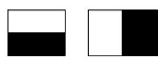
眼部和面部检测模块采用改进的基于特征的Haar级联人脸检测分类器算法进行编程[13,22,26,28,31,32]。改进的Haar级联人脸检测分类器算法可检测入侵者对象的边缘、线条以及中心环绕特征。各种Haar级联分类器如图6所示。如图6和7所示,可根据捕获的入侵者图像的中间表示来捕获和计算矩形特征。Haar级联分类器与现有方法在人脸检测率分析方面的结果如表2所示,表明在普通场景下针对约5000个人脸样本且入侵者未遮挡面部时,改进的Haar级联分类器的准确人脸检测率远高于先前的方法。这是当前实验研究中采用改进的Haar级联分类器的主要原因。在位置a, b处检测到的入侵者图像包含位于a, b上方和左侧的像素总和,如下列方程所述。
$$
ii(a, b)= \sum_{a′≤a,b≤b′} i(a′, b′) \quad (1)
$$
其中,$ii(a, b)$ 是检测到的入侵者图像,$i(a’, b’)$ 是原始图像,$(a, b)$ 表示检测到的图像的 $x$ 和 $y$ 坐标,$(a’, b’)$ 表示原始图像的 $x$ 和 $y$ 坐标,$S$ 表示像素总和。当所提出的系统处于空闲状态或尚未在智能家居中捕获到闯入者时,$S$ 的初始条件设为零,并通过以下递推公式对进行设置。
$$
S(a, b)= S(a, b−1)+ i(a, b) \quad (2)
$$
$$
ii(a, b)= ii(a, b−1)+ S(a, b) \quad (3)
$$
 边缘特征;(b)线条特征;(c)四矩形特征;(d)中心环绕特征;以及(e)面部分类器。)
边缘特征;(b)线条特征;(c)四矩形特征;(d)中心环绕特征;以及(e)面部分类器。)
表2. 在入侵者未遮挡面部的情况下,改进的Haar级联分类器与现有方法论的人脸检测率准确度分析
| 人脸检测类型 | 方法论 | 普通场景下的人脸检测率准确度 (%) [总样本量 = 5000] |
|---|---|---|
| 改进的Haar级联 | 97.01 | |
| 神经网络 | 75.4 | |
| 皮肤分割模板 | 52.3 | |
| 匹配改进的Haar级联 | 65.87 | |
| 高阶统计 | 72 | |
| 两步R‐CNN方法 | 94 |
级联分类器计算被检测到的入侵者面部的质心,并根据缩放值计算半径。根据几何面部模型[27],,以裁剪的嘴部区域作为感兴趣区域(ROI),我们将左上角坐标定义为(x, y),质心点定义为(cx, cy),半径定义为r。随后,嘴部区域可大致按如下方式获得
$$
x=(cx −(2r / 5)) \quad \text{and} \quad y=(cy+(r / 3)) \quad (4)
$$
嘴宽$Wm = r$和嘴高$Hm = r/2$,其中嘴高为嘴高$Hm$,嘴宽为嘴宽$Wm$。
在进行的实验中,使用公式(4)所示的级联分类的主要原因是使所提出的系统能够检测多张人脸,包括通过区分强分类器和弱分类器来检测重叠人脸模式,如图8和9a所示。此处,特征值定义为白色矩形和黑色矩形中像素总和S之间的总差值,如图6所示。该算法通过对捕获的特征值进行阈值化来定义弱分类器。改进的Haar级联分类算法训练强分类器,以实现非常低的错误接受和错误识别率。如图8所示,第一级分类器的正向结果将触发第二级分类器的评估,后者又会触发第三级分类器,依此类推。
如果在整个过程中出现负向结果,则导致子窗口的终止。在此阶段,使用改进型哈尔级联构建多个分类器阶段,以最小化漏检。
与现有方法相比,该框架比其他识别框架快15倍[31]。根据罗利等人提出的人脸定位框架,基于多分类器的近实时人脸检测系统在检测人脸方面比现有方法论更快,是最快算法。所提出的系统还可以使用改进的Haar级联人群分类器捕获单帧中被捕获的一组人脸,如图9a所示。图9b表示在进行的实验中智能家居防盗系统未捕获的非人类物体样本。为了进行非人类物体检测实验,使用了狗、猫、麻雀和鹦鹉的样本,如图9b所述。
(a)
(b)
人群级联图像分类器样本(照片版权许可于2017年4月1日获得)。(b)非人类物体样本(照片版权许可于2017年7月9日获得)。)
如图10a所示,在普通场景中检测到入侵者且入侵者未完全/部分遮挡面部的情况下,使用约1万多样本进行了严格的实验研究。在超过10,000个人脸样本中,超过97%的情况下人脸检测准确率达到100%。图10b以热图表示的形式展示了97%准确率情况下的人脸检测率分析。
(a)
(b)
 所提出的系统在普通场景下使用10,000个人脸样本进行人脸检测率分析,其中入侵者未遮挡面部(b)所提出的系统在普通场景下使用10,000个人脸样本进行人脸检测率分析的热图表示,其中入侵者未遮挡面部。)
所提出的系统在普通场景下使用10,000个人脸样本进行人脸检测率分析,其中入侵者未遮挡面部(b)所提出的系统在普通场景下使用10,000个人脸样本进行人脸检测率分析的热图表示,其中入侵者未遮挡面部。)
4.2. 第二阶段
在完成初始人脸检测后,设计了一种智能第二阶段算法,以消除捕获半隐藏人脸的误报,该算法基于人脸最亮特征[26,27,33–38]。针对每个正样本,设置了动态阈值(范围为0.5到0.7),用于捕捉部分或完全遮挡的脸部入侵者中最亮的部分。在进行了大量实验后发现,所提出的系统无需针对白天或夜间入侵设置不同的动态阈值。为了检测视网膜点和其他明亮的面部特征,采用了改进的Gabor滤波器[38]。Gabor滤波器是异构图像特征提取的有力工具。Gabor滤波器能够从多样化的人脸图像中提取共同特征。
Gabor滤波器利用Gabor小波,在检测和区分图像特征提取方面非常强大。Gabor滤波器还具有与人类视觉系统相似的特性[19]。
在每个视网膜点,通过构成与该点相关联的响应场的Gabor通道向量来检测图像附近的功率范围。Gabor通道是理想的选择,因为它们能够最小化图像与频域平面联合扩展。当仅使用少量频率通道时,通道的高斯范围会导致频域原点附近覆盖过于密集,而高频区域覆盖不足。这是因为每个高斯函数对高频和低频的加权方式是对称的,而在高频处分解较粗糙。为了抵消这一效应,采用了一组改进的Gabor通道,这些通道在对数极坐标频域[20]中被定义为高斯函数。图11a,b显示了傅里叶域中的改进Gabor滤波器以及截面坐标的二维图。因此,可将调谐至角频率的通道定义如下
$$
G(\omega, \delta)= A \exp\left(-\frac{(\delta - \delta_0)^2}{2\sigma_\delta^2}\right) \times \exp\left(-\frac{(\varphi - \varphi_0)^2}{2\sigma_\varphi^2}\right) \quad (5)
$$
其中$A$是归一化常数,$(\delta, \varphi)$为极坐标频率坐标。
 傅里叶域中的Gabor滤波器、等高线,以及(b)截面图。)
傅里叶域中的Gabor滤波器、等高线,以及(b)截面图。)
图12展示了各种分类器样本,其中入侵者使用普通、黑色、有阴影、带框和无框眼镜部分遮挡其面部。此外,还展示了入侵者使用透明、实心、塑料和/或皮革材料部分遮挡面部的场景。另外,图13a还展示了一些在黑夜中使用普通模拟相机被捕获的分类器样本。
在检测到的入侵者部分遮挡面部(使用透明、实心、塑料或皮革材料)的场景下,使用约10,000个人脸样本进行了严格实验。图13a报告了在此条件下对10,000人进行正确人脸检测率分析的结果。正确人脸检测率准确度达到84%以上,当使用超过10,000张图像时也获得了类似的准确率。图13b以热图表示的形式展示了准确率为84%情况下的人脸检测率分析。
(a)
(b)
4.3. 最终阶段
在第二阶段完成后,如果系统仍无法捕获闯入者的面部特征,则将执行最终阶段。在此阶段,如果检测到的入侵者是人,则系统将跟踪该被检测到的人体目标的运动,并通过发送最新捕获的图像和一段压缩视频(45帧每秒)通知房主家中有陌生人存在。此外,该系统具备足够的智能性,能够根据面部的变化来捕获入侵者;系统设置了动态阈值,即使入侵者使用透明、实心、塑料和/或皮革材料完全遮盖面部,也能捕获面部最亮部分。该系统还可在夜间或低光照条件下检测入侵者。这仅需使用一台普通模拟相机,使得整个系统非常经济实惠。为了检测入侵者的运动,参考图像(a,b)和捕获的视频帧是从捕获的视频序列中获取的。二值运动检测掩码M(a,b)可按如下方式计算
$$
M(a, b)=
\begin{cases}
1, & \text{if } |I_t(a, b)− B(a, b)|> T \
0, & \text{if } |I_t(a, b)− B(a, b)|≤ T
\end{cases}
\quad (6)
$$
此处,$T$ 是预定义的阈值,用于在捕获的视频帧中捕捉移动物体。如果参考图像与当前视频帧之间的直接对比度未超过$T$,则识别覆盖区域中的像素被标记为“0”,表示其包含背景。通常情况下,动态像素被标记为“1”,用于表示移动物体。为了捕捉复杂场景,采用了一种简单的统计差异方法,利用平均值和标准差。该方法计算每个捕获的视频帧中每个像素的平均值。每个像素 $\mu_{xy}$ 的像素值是根据给定时间间隔内($t_0$, $t_{k−1}$)所有先前捕获的帧集合计算得出的。对于每个计算出的像素,阈值由标准差 $\sigma_{ab}$ 按如下方式确定。
$$
\mu_{ab}= \frac{1}{k} \sum_{k=0}^{k-1} I_k(a, b)
$$
$$
\sigma_{ab}= \left( \frac{1}{k} \sum_{k=0}^{k-1} \left( I_k(a, b)−\mu_{ab} \right)^2 \right)^{1/2} \quad (7)
$$
为了实现物体运动检测,计算了图像背景与被捕获的视频帧之间的差异。此处,预定义参数为 $\lambda$。如果被捕获的视频帧与图像背景之间的确切差异大于 $\lambda\sigma_{xy}$或小于 $\lambda\sigma_{ab}$,则可按如下方式计算背景像素。
$$
M(a, b)=
\begin{cases}
1, & \text{if } |I_t(a, b)− B(a, b)| > \lambda\sigma_{xy} \
0, & \text{if } |I_t(a, b)− B(a, b)| ≤ \lambda\sigma_{ab}
\end{cases}
\quad (8)
$$
如图15a所示,在被检测到的入侵者完全用透明、实心、纸张、塑料或皮革材料遮盖面部的场景中,使用约10,000个人脸样本进行了严格的实验研究。上图描述了这10,000个人体样本在这些变化情况下的人脸检测率分析。如图15a所示,面部检测的准确率约为78%。图15b以热图表示的形式展示了准确率为78%情况下的人脸检测率分析。
(a)
(b)
图16a描述了普通模拟相机在无夜视功能的情况下,对夜间检测到的10,000张人类图像进行人脸检测率分析的结果。大约在67%的情况中,面部被准确检测到,并且在大量图像上达到了相似的准确率。图16b以热图表示的形式展示了检测到的67%情况的人脸检测率分析。
(a)
(b)
 所提出的系统在黑夜中检测到入侵者场景下,使用10,000个人脸样本的人脸检测率分析。(b)所提出的系统在黑夜中检测到入侵者场景下,使用10,000个人脸样本的人脸检测率分析的热图表示。)
所提出的系统在黑夜中检测到入侵者场景下,使用10,000个人脸样本的人脸检测率分析。(b)所提出的系统在黑夜中检测到入侵者场景下,使用10,000个人脸样本的人脸检测率分析的热图表示。)
在上述所有场景中进行的严格实验研究中所使用的男女比例分析如图17所示,该图描绘了以下场景中的男性和女性样本分布:(a)面部未被遮挡,(b)面部部分被遮挡,(c)面部完全被遮挡,以及(d)通过模拟相机在黑暗中拍摄。所有实验研究所使用的总样本量为10,000张图像。
(a)
(b)
(c)
(d)
对各种肤色(深色、浅褐色、偏白、白皙、非常白皙和白色)的分析如图18所示。所提出的系统在所有肤色类型以及上述所有场景中均实现了高准确率,如表3所示。结果明确表明,在针对白色、非常白皙、白皙、小麦褐色、小麦色和深色等多种肤色进行的实验中,当入侵者部分遮挡面部时,准确率超过80%;当入侵者使用某种塑料、皮革或纸张完全隐藏面部时,准确率超过70%;当使用不具备夜视功能的普通模拟相机在黑夜中捕捉到入侵者时,准确率超过60%。
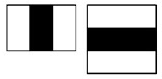
表3. 不同场景下多种肤色的准确率分析。
| 肤色 | 准确率%(总样本量= 10,000) | 场景1:入侵者面部未被遮挡 | 场景2:入侵者面部部分被遮挡(部分遮挡的脸,且某种透明、固体、塑料、皮革材料)(%) | 场景3:入侵者面部完全被遮挡(并使用某种类型的透明、固体、塑料、皮革材料)(%) | 场景4:入侵者在黑暗中被捕捉(黑夜或光线不良条件)(%) |
|---|---|---|---|---|---|
| 白色 | 97.9 | 91.9 | 79.7 | 66.4 | |
| 非常白皙 | 97.8 | 87.8 | 76.7 | 64.01 | |
| Fair | 95.6 | 85.6 | 74.9 | 63.12 | |
| 小麦色 | 94.5 | 84.5 | 73.8 | 63.05 | |
| 小麦色棕色 | 94.3 | 84.3 | 72.6 | 62.75 | |
| Dark | 93.7 | 83.7 | 71.9 | 62.12 |
如图19所示,对图12、图13、图15以及图16中提到的所有场景进行了10,000个人脸样本的正确人脸检测率比较。比较结果表明,在被检测到的入侵者未遮挡面部、部分遮挡面部、完全遮挡面部以及在黑暗中被检测到这四种场景下,所达到的正确人脸检测准确率分别为97.01%、84.13、78.19%和66.5%。图20描述了在四种场景下捕获的10,000个人脸样本的年龄组分析:(a)面部未被遮挡,(b)面部部分被遮挡,(c)面部完全被遮挡,以及(d)通过模拟相机在黑暗中拍摄。

图20描绘了多种年龄群体样本:(i) <10岁,(ii) (10–15岁)之间,(iii) (15–20岁)之间,(iv) (20–35岁)之间,(v) (35–45岁)之间,(vi) (45–55岁)之间,(vii) (55–60岁)之间,以及(viii) >60,对应于相应的人脸检测率和人脸样本。所有实验研究所使用的总样本量为10,000张图像。
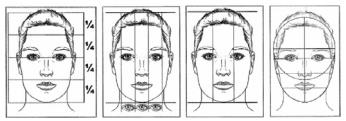
表4. 改进的Haar级联分类器在四种场景下与现有方法论的人脸检测率准确度分析:(a)面部未被遮挡;(b)面部部分被遮挡;(c)面部完全被遮挡;以及(d)通过模拟相机在黑暗中拍摄。
| 方法论 | 准确率%(总样本量 = 10,000) | 场景1:入侵者面部未被遮挡 | 场景2:入侵者面部部分被遮挡(部分遮挡的脸并带有某种透明、实心的塑料、皮革材料)(%) | 场景3:入侵者面部完全被遮挡(使用某种透明、实心、塑料、皮革材料的遮挡面部)(%) | 场景4:入侵者被捕获在黑夜或光线不良条件下被捕捉(%) |
|---|---|---|---|---|---|
| 改进型哈尔级联 | 97.01 | 84.13 | 78.19 | 66.5 | |
| 神经网络 | 95 | 80.8 | 56.70 | 44.01 | |
| Skin分割模板 | 75.6 | 65.5 | CD3 | CD4 | |
| 匹配改进型哈尔级联 | 69 | 34.5 | CD3 | CD4 | |
| 两步R‐CNN | 95 | 75 | 69 | 55 | |
| 高阶统计 | 72 | 50 | CD3 | CD4 | |
| 面容网 | 94 | 75 | CD3 | CD4 |
CD3—无法在场景3中检测到入侵者,CD4—无法在场景4中检测到入侵者。
5. 结论
这篇研究论文提出了一种创新的方法,通过提供正在进行的入侵的即时通知来防止智能家居盗窃。该研究提供了一种新颖的无线传感系统,用于监控和检测人类入侵者,并即时通知入侵事件以防止盗窃。该系统消除了使用数字视频录像机进行录制以及使用大量存储器进行存储的需求。
该系统能够有效识别人类入侵者,并通过区分人类与非人类物体,在入侵者为非人类时防止误报。所有这些过程通过提供有关潜在盗窃的实时通知,实现即时入侵警报。智能家居防盗系统在入侵检测方面的性能评估参数记录了四种不同场景:(a)面部未被遮挡,(b)面部部分被遮挡,(c)面部完全被遮挡,以及(d)通过模拟相机在黑暗中拍摄。对比表明,在被检测到的入侵者未遮挡面部、部分遮挡面部、完全遮挡面部以及在黑暗中被检测到的场景中,所达到的正确人脸检测准确率分别为97.01%、84.13、78.19%和66.5%。所提出系统的最大优势在于,其成本仅为市场上数字视频录像机及其他基于监控的解决方案的50%。
护理人员以及授权机构的信息将由本地家庭网关服务器或云服务器上传至网站。如果入侵者通过拒绝服务攻击禁用WiFi连接,则所提出的系统将无法向房主通知正在进行的盗窃。然而,所提出的系统配备了蓝牙网络,仍可记录正在进行的盗窃行为,但由于缺乏WiFi/互联网连接,无法向房主发送通知。随着连接网络与物理世界的产品日益增多,安全与隐私方面出现了新的研究挑战。预计这些研究问题将在未来由同行研究人员进一步解决。

















 1041
1041

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









