







1、单链表
结构图:
效率问题:
时间复杂度是O(N)。平均来说,要访问一个结点,时间复杂度也有O(N/2);
实现:
Typedef struct//表元素
{
elem *next;
结点数据
} elem;
class linkedlist//表头
{
elem *next;
};
int IsLast(elem* p)//是否是最后一个
{
return p->next==NULL;
}
elem Find(要找的数据,linkedlist* L)//Find函数
{
elem* p;
p=L->next;
while(p!=NULL&&p->结点数据!=要找的数据)
p=p->next;
}
elem PreFind(要找的数据,linkedlist* L)//找数据之前的元素
{
elem* p;
p=L->next;
while(p->next!=NULL&&p->next->结点数据!=要找的数据)
p=p->next;
}
void Delete(要删除的数据,linkedlist* L)//删除函数
{
(elem*) p,tmpcell;
p= PreFind(要删除的数据,L);
if(!IsLast(p))
{
tmpcell=p->next;
p->next=tmpcell->next;
free(tmpcell);
}
}
void Insert(要插入的数据,linkedlist* L,elem* p)//插入数据
{
elem* tmpcell;
tmpcell=malloc(sizeof(elem));
tmpcell->结点数据= 要插入的数据;
tmpcell->next=p->next;
p->next=tmpcell;
}
2、双链表:
结构图:![]()
效率问题:
顾名思义,在双链表的结点中有两个指针,一个指向直接后继,另一个指向直接前驱,所以效率跟单链表一样
实现:
typedef struct //双链表的元素
{
elem *next;
elem *prev;
结点数据
} elem;
class linkedlist//表头
{
elem *next;
};
void Delete(要删除的数据,linkedlist* L)//删除函数
{
(elem*) p,tmpcell;
p = Find(要删除的数据,L);
if(!IsLast(p))
{
tmpcell=p->prev;
tmpcell->next=p->next;
p->next->prev=tmpcell;
free(p);
}
}
其它的变化不大
3、循环链表:
结构图:

实现:
class linkedlist//表头
{
elem *next;
elem *prev;//指向末尾
};
最后一个元素指向表头
4、栈:
结构图:
实现:
由于栈是一个表,因此任何实现表的方法都可以实现栈,在这里我们运用两种流行的实现方法。
栈的链表实现:
struct Node//节点
{
数据
Node* next;
};
typdef Node* Stack;//代表栈
int IsEmpty(Stack s)//判断是否为空
{
return s->next==NULL;
}
void MakeEmpty(Stack s)//使栈为空
{
if(s==NULL)
{
error;
}
else
{
while(!IsEmpty(s))
{
pop(s);
}
}
}
Stack CreateStack()//创建栈
{
Stack s;
s=malloc(sizeof(Node));
if(!s)
{
error;
}
else
{
s->next=NULL;
MakeEmpty(s);
}
}
void Push(推入的数据,Stack s)//推入
{
Node* n;
n=malloc(sizeof(Node));
if(n==NULL)
{
error;
}
else
{
n->数据=推入的数据;
n->next=s->next;
s->next=n;
}
}
数据 Top(Stack s)//返回顶点数据
{
if(!IsEmpty(s))
{
return s->next->数据;
}
return 0;
}
void Pop(Stack s)
{
Node* n;
if(IsEmpty(s))
{
error;
}
n=s->next;
s->next=n->next;
free(n);
}
5、队列
概念:
队列是一种同栈相反和数据结构;它具有一个出口和一个入口;这是一种元素先入先出的结构;(这里我们用数组来设计一个队列)
struct Queue
{
int front;//出口
int back; //入口
int size;//目前插入的数据数
int capacity;元素数组容量
ElementData* array;
};
Queue* CreateQueue(int capacity)
{
Queue* tmpqueue;
tmpqueue=new Queue();
tmpqueue->front=0;
tmpqueue->back=0;
tmpqueue->size=0;
tmpqueue->capacity=capacity;
array=new ElementData[capacity];
}
bool IsEmpty(Queue* q)
{
if(q->size==0)
{
return true;
}
return false;
}
void Enqueue(ElementData ed,Queue* q)
{
q->array[tmpqueue->back]=ed;
q->back++;
if(q->back>q->capacity)
{
q->back=0;
}
q->size++;
}
ElementData Dequeue(Queue* q)
{
ElementData tmpdata;
if(IsEmpty(q))
{
return NULL;
}
tmpdata=q->array[q->front];
q->front++;
if(q->front>q->capacity)
{
q->front=0;
}
return tmpdata;
}
6、递归
7、二叉树
8、二叉搜索树(ADT)
概念:
对于树中的每个结点的值X,左子树的值都小于X,右子树的值都大于X;
struct TreeNode
{
数据
TreeNode* LeftNode;
TreeNode* RightNode;
}
typedef TreeNode* SearchTree;
TreeNode* FindMin(SearchTree)//搜索最小值节点
{
if(SearchTree==NULL)
{
return NULL;
}
else if(SearchTree->LeftNode!=NULL)
{
return FindMin(SearchTree->LeftNode);
}
else if(SearchTree->LeftNode==NULL)
{
return SearchTree;
}
}
TreeNode* Find(数据,SearchTree)
{
if(SearchTree==NULL)
{
return NULL;
}
if(数据<SearchTree->数据)
{
return Find(数据,SearchTree->LeftNode);
}
else if(数据>SearchTree->数据)
{
return Find(数据,SearchTree->RightNode);
}
else
{
return SearchTree;
}
}
TreeNode* Insert(数据,SearchTree)
{
if(SearchTree==NULL)
{
SearchTree=new SearchTree();
SearchTree->数据=数据;
SearchTree->LeftNode=SearchTree->RightNode=NULL;
}
else if(数据<SearchTree->数据)
{
SearchTree->LeftNode=Insert(数据,SearchTree->LeftNode);
}
else if(数据>SearchTree->数据)
{
SearchTree->RightNode=Insert(数据,SearchTree->RightNode);
}
return SearchTree;
}
void Delete(数据,SearchTree)
{
if(SearchTree==NULL)
{
return;
}
else if(数据<SearchTree->数据)
{
Delete(数据,SearchTree->LeftNode);
}
else if(数据>SearchTree->数据)
{
Delete(数据,SearchTree->RightNode);
}
else
{
if(SearchTree->RightNode&&SearchTree->LeftNode)//如果子树都存在,则应把右子树最小元素拿来替换(或左子树最大元素)
{
TreeNode* lptmpnode=FindMin(SearchTree->RightNode);
SearchTree->数据=lptmpnode->数据;
Delete(lptmpnode->数据,SearchTree->RightNode);
}
else//如果子树有至少一个为NULL
{
TreeNode* lptmpnode=SearchTree;
if(SearchTree->LeftNode==NULL)
{
SearchTree=SearchTree->RightNode;
}
else if(SearchTree->RightNode==NULL)
{
SearchTree=SearchTree->LeftNode;
}
free(lptmpnode);
lptmpnode==NULL;
}
}
}
9、平衡二叉树(AVL)
AVL树的特点是:
1、它本身是个二叉树;
2、每个结点的左右子树高度差的绝对值不大于1;
struct TreeNode
{
数据
int height;
TreeNode* LeftNode;
TreeNode* RightNode;
}
typedef TreeNode* SearchTree;
int Height(TreeNode* treenode)
{
if(treenode==NULL)
{
return -1;
}
else
{
return treenode->height;
}
}
//单旋转
TreeNode* LeftSingleRotate(SearchTree)
{
TreeNode* tmpnode;
tmpnode=SearchTree->LeftNode;
SearchTree->LeftNode=tmpnode->RightNode;
tmpnode->RightNode=SearchTree;
tmpnode->height=max(Height(tmpnode->LeftNode),Height(tmpnode->RightNode))+1;
SearchTree->height=max(Height(SearchTree->LeftNode),Height(SearchTree->RightNode))+1;
return tmpnode;
}
TreeNode* RightSingleRotate(SearchTree)
{
TreeNode* tmpnode;
tmpnode=SearchTree->RightNode;
SearchTree->RightNode=tmpnode->LeftNode;
tmpnode->LeftNode=SearchTree;
tmpnode->height=max(Height(tmpnode->LeftNode),Height(tmpnode->RightNode))+1;
SearchTree->height=max(Height(SearchTree->LeftNode),Height(SearchTree->RightNode))+1;
return tmpnode;
}
//双旋转
TreeNode* LeftDoubleRotate(SearchTree)
{
SearchTree->LeftNode=RightSingleRotate(SearchTree->LeftNode);
return LeftSingleRotate(SearchTree);
}
TreeNode* RightDoubleRotate(SearchTree)
{
SearchTree->RightNode=LeftSingleRotate(SearchTree->RightNode);
return RightSingleRotate(SearchTree);
}
TreeNode* Insert(数据,SearchTree)
{
if(SearchTree==NULL)
{
SearchTree=new TreeNode();
SearchTree->height=0;
SearchTree->LeftNode=SearchTree->RightNode=NULL;
}
else if(数据<SearchTree->数据)
{
SearchTree->LeftNode=Insert(数据,SearchTree->LeftNode);
if((Height(SearchTree->LeftNode)-Height(SearchTree->RightNode))==2)
{
if(数据<SearchTree->LeftNode->数据)
{
SearchTree=LeftSingleRotate(SearchTree);
}
else
{
SearchTree=LeftDoubleRotate(SearchTree);
}
}
}
else if(数据>SearchTree->数据)
{
SearchTree->RightNode=Insert(数据,SearchTree->RightNode);
if((Height(SearchTree->RightNode)-Height(SearchTree->LeftNode))==2)
{
if(数据>SearchTree->RightNode->数据)
{
SearchTree=RightSingleRotate(SearchTree);
}
else
{
SearchTree=RightDoubleRotate(SearchTree);
}
}
}
SearchTree->height=max(Height(SearchTree->LeftNode),Height(SearchTree->RightNode))+1;
return SearchTree;
}
10、优先队列
二叉堆:其实际是一棵被填满的完全二叉树;完全二叉树可以用数组表示;
对于数组中的任一位置i上的元素,它的左儿子的位置在2*i+1上,它的右儿子的位置在2*i+2上;
一棵高为h的完全二叉树,它的节点数为2^h到2^(h+1)-1个;
struct QueueHead//堆头
{
int cur_pos;//目前的位置
int capacity;//容积
ElementData* lpeledata;
}
HeapQueue* InitQueue(int nMaxEleNum)//优先队列的初始化
{
QueueHead* lptmpqueue;
lptmpqueue=new HeapQueue();
lptmpqueue->cur_pos=0;
lptmpqueue->capacity=nMaxEleNum;
lptmpqueue->lpeledata=new ElementData[nMaxEleNum];
lptmpqueue->lpeledata[0]=MinEleData;//为最小元素
return lptmpqueue(ElementData nElementData,
}
void InsertQueue(ElementData nElementData, HeapQueue* lpqueue)
{
lpqueue->cur_pos++;
int i;
for(i=lpqueue->cur_pos;lpqueue->lpeledata[i/2]>nElementData;i/=2)
{
lpqueue->lpeledata[i]=lpqueue->lpeledata[i/2];
}
lpqueue->lpeledata[i]=nElementData;
}
删除最小的算法可看图:
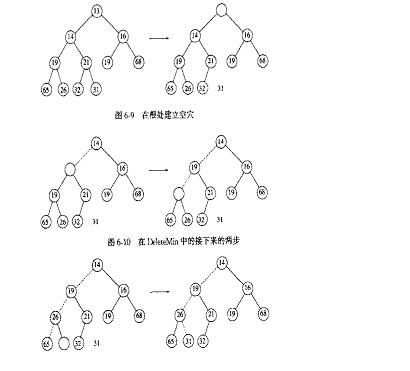
ElementData DeleteMin(HeapQueue* lpqueue)
{
ElementData tmpmin;
ElementData lastdata;
tmpmin=lpqueue->lpeledata[0];
lastdata=lpqueue->lpeledata[lpqueue->size];
lpqueue->size--;
int i=0;
while(lpqueue->lpeledata[i]<lastdata&&(2*i)<lpqueue->size)
{
if(lpqueue->lpeledata[2i+1]>lpqueue->lpeledata[2i+2])
{
lpqueue->lpeledata[i]=lpqueue->lpeledata[2i+2];
i=2i+2;
}
else
{
lpqueue->lpeledata[i]=lpqueue->lpeledata[2i+1];
i=2i+1;
}
}
lpqueue->lpeledata[i]=lastdata;
return tmpmin;
}
左式堆:
对于堆中的每个节点,左子节点的零路径长(从本节点到一个没有子节点的节点的最短路径长)大于等于右子节点的零路径长;
struct TreeNode
{
ElementData element;
TreeNode* leftNode;
TreeNode* rightNode;
int nullPathLength;//零路径长
}
typedef LeftQueue TreeNode
void SwapChildren(LeftQueue* nqueue)//把左子树同右子树互换
{
LeftQueue* tmpqueue;
tmpqueue=nqueue->leftNode;
nqueue->leftNode=nqueue->rightNode;
nqueue->rightNode=tmpqueue;
}
合并方法为:如果两个堆有一个为NULL,则返回另外一个堆;然后把根值小的堆的右子树同根值大的进行递归合并;由于最后合并的堆右子树会大于左子树(这样合并后就不是一个左式堆了),所以我们还得把它的左子树跟右子树对换,然后把它的零路径长设为右子树的零路径长加1;
LeftQueue* Merge(LeftQueue* nH1,LeftQueue* nH2)
{
if(nH1==NULL) return nH2;
if(nH2==NULL) return nH1;
LeftQueue* retqueue;
if(nH1->element<nH2->element)
{
retqueue=Merge1(nH1,nH2);
}
else
{
retqueue=Merge1(nH2,nH1);
}
return retqueue;
}
LeftQueue* Merge1(LeftQueue* nH1,LeftQueue* nH2)
{
if(nH1->rightNode==NULL)
{
nH1->rightNode=nH2;
}
else
{
nH1->rightNode=Merge(nH1->rightNode,nH2);
if(nH1->rightNode->nullPathLength>nH1->leftNode->nullPathLength)
{
SwapChildren(nH1);
}
nH1->nullPathLength=nH1->rightNode->nullPathLength+1;
}
return nH1;
}
LeftQueue* Insert(LeftQueue* nqueue,ElementData nelement)
{
LeftQueue* tmpqueue;
tmpqueue=new LeftQueue();
tmpqueue->element=nelement;
tmpqueue->nullPathLength=0;
tmpqueue->leftNode=tmpqueue->rightNode=NULL;
return Merge(nqueue,tmpqueue);
}
LeftQueue* DeleteMin(LeftQueue* nqueue)
{
LeftQueue* leftstack;
LeftQueue* rightstack;
leftstack=nqueue->leftNode;
rightstack=nqueue->rightNode;
free(nqueue);
return Merge(leftstack,rightstack);
}
11、散列表
概念:
理想的散列表是一个包含关键字的固定大小的数组,而散列函数就是计算每个关键字映射到数组中的对应位置(同时不同的两个关键字不可对应到同一个位置).
一个简单的计算关键字为字符串时的散列函数:
unsigned int Hash(const char* key,int tablesize)
{
unsigned int reval=0;
while(*key!='/0')
{
reval+=*key++;
}
return reval%tablesize;
}
散列表过大时的一个散列函数:
这个只考察前3个字符,有27*27*27种组合
unsigned int Hash(const char* key, int tablesize)
{
return (key[0]+key[1]*27+key[2]*27^2)%tablesize;
}
下面是一个可以考察所有字符的散列函数
上面散列函数据用公式:k0+k1*n+k2*n*n;可转换为:(k2*n+k1)*n+k0
unsigned int Hash(const char* key,int tablesize)
{
unsigned int hashval=0;
while(*key!='/0')
{
hashval=hashval<<5+*key++;
}
return hashval%tablesize;
}
分离链接法(separate chaining):其做法是将散列到同一个位置的元素以一个链表的方式保存。通常产生冲突的元素被插入到链表的最前面,这样不仅方便,而且由于最后插入的元素最有可能不久再使用,这样在查找起来效率会增加。分离链接实现简单,但是双向链表会占用额外的内存,冲突严重时,查找效率也会严重下降;
以下是个分离链接散列表,它可以用来解决冲突
struct ListNode
{
数据;
ListNode* lpNext;
};
typedef ListNode *HashElement;
struct HashTable
{
int tablesize;
HashElement* thelist;
}
HashTable* InitHash(int tablesize)//初始化散列表
{
HashTable* lphashtb;
lphashtb=new HashTable();
lphashtb->tablesize=tablesize;
lphashtb->thelist=new HashElement[tablesize];
for(int i=0;i<tablesize;i++)
{
lphashtb->thelist[i]=new ListNode();
lphashtb->thelist[i]->lpNext=NULL;
}
return lphashtb;
}
ListNode* Find(数据, HashTable h)//在分离链接散列表中查找数据
{
ListNode* tmpnode;
tmpnode=h->thelist[Hash(数据,h->tablesize)];
while(tmpnode!=NULL&&tmpnode->数据!=数据)
tmpnode=tmpnode->lpNext;
return tmpnode;
}
void Insert(数据,HashTable h)//插入数据到分离链接散列表中
{
ListNode* tmpnode;
tmpnode=Find(数据,h);
if(tmpnode==NULL)
{
ListNode* hashnode=h->thelist[Hash(数据,h)];
tmpnode=new ListNode();
tmpnode->lpNext=hashnode->lpNext;
tmpnode->数据=数据;
hashnode->lpNext=tmpnode;
}
}
开放地址散列表:
用开放定址法解决冲突的做法是:当冲突发生时,使用某种探查 ( 亦称探测 ) 技术在散列表中形成一个探查 ( 测 )序列。沿此序列逐个单元地查找,直到找到给定的关键字,或者碰到一个开放的地址 ( 即该地址单元为空 )为止(若要插入,在探查到开放的地址,则可将待插入的新结点存人该地址单元)。查找时探查到开放的地址则表明表中无待查的关键字,即查找失败。
注意:
① 用开放定址法建立散列表时,建表前须将表中所有单元 ( 更严格地说,是指单元中存储的关键字 ) 置空。
enum state
{
empty,
active
};
struct HashElement
{
数据;
state elementstate;
}
struct HashTable
{
int tablesize;
HashElement* thelist;
};
HashTable* InitHashTable(int tablesize)
{
HashTable* hashtable;
hashtable=new HashTable();
hashtable->tablesize=tablesize;
hashtable->thelist=new HashElement[tablesize];
for(int i=0;i<tablesize;i++)
{
hashtable->thelist[i]->elementstate=empty;
}
}
unsigned int Find(数据,HashTable* nHT)
{
unsigned int pos;
int collision_num=0;//冲突次数;
pos=Hash(数据,nHT->tablesize);
while(nHT->thelist[pos]->elementstate!=empty&&nHT->thelist[pos]->数据!=数据)
{
pos+=2*(++collision_num)-1;//增量为奇数;
if(pos>=nHT->tablesize)
{
pos-=nHT->tablesize;
}
}
return pos;
}
void Insert(数据,HashTable nHT)
{
unsigned int pos;
pos=Find(数据,nHT);
if(nHT->thelist[pos]->elementstate==empty)
{
nHT->thelist[pos]->elementstate=active;
nHT->thelist[pos]->数据=数据;
}
}
12、排序
插入排序:插入算法(insertion sort)把要排序的数组分成两部分:第一部分包含了这个数组的所有元素,但将最后一个元素除外,而第二部分就只包含这一个元素。在第一部分排序后,再把这个最后元素插入到此刻已是有序的第一部分里的正确位置中。
void InsertSort(Element ele[],int size)
{
for(int i=1;i<size;i++)
{
Element data=ele[i];
int index;
for(index=i;index>0&&ele[index-1]>ele[index];index--)
{
ele[index]=ele[index-1];
}
ele[index]=data;
}
}
希尔排序:
希尔排序算法是对插入排序的一种改进,其核心是减少已排序区域的右移次数来提高速度。具体做法是先获得一个间隔数值 h,然后将 n-1 替换成 n-h 来完成插入排序。其中不同的间隔数值的选取会影响到整个排序的效率;
将插入排序稍改下就成了希尔排序
void InsertSort(Element ele[],int size)
{
int increment;//新增加一个间隔量
for(increment=size/2;increment>0;increment/=2)//这也是新增的
{
for(int i=increment;i<size;i++)
{
Element data=ele[i];
int index;
for(index=i;index>=increment&&ele[index-increment]>ele[index];index-=increment)
{
ele[index]=ele[index-increment];
}
ele[index]=data;
}
}
}
13、图论
如果图中的边都是有方向的则为:有向图;
如果图中的边都是无方向的则为:无向图;
图的两种表示方法:
1、使用二维数组(又称邻接矩阵):这样种的数组大小需要顶点数^2;
2、使用邻接表:在图是稀疏时候最好用这个;结构如下图表示;也就是对每个顶点,我们使用链表来存放所有它的邻接顶点;其中最左边只是个表头。用数组来表示表头.

最短路径算法:
赋权路径值:指路径上权值的总和;
无权路径值:指路径上的边数;
以下是一个应用广度优先搜索算法的计算无权路径的伪代码;
void UnWeight(Table T)
{
for(int curdist=0;curdist<VertexNum;curdist++)
{
for each vertex v
{
if(!T[v].know&&T[v].dist==curdist)
{
T[v].know==true;
for w to 其邻接顶点
{
if(T[w].dist==UnDist)
{
T[w].FatherVertex=v;
T[w].dist=curdist++;
}
}
}
}
}
}
使用队列精练后的计算无权路径的伪代码:
void UnWeight(Table T)
{
Queue q;
Vertex tmpvt;
q=CreateQueue(NumVertex);
MakeEmpty(q);
Enqueue(StartVertex,q); //向队列中插入开始点
T[StartVertex].dist=0;
while(!IsEmpty(q))
{
tmpvt=Dequeue(q);
T[tmpvt].know=true;
for w to 其邻接顶点
{
if(T[w].dist==UnDist)
{
T[w].FatherVertex=v;
T[w].dist=T[tmpvt].dist+1;
Enqueue(w,q);
}
}
}
}
当权值不为负时计算赋权最短路径算法:
以下的CVW=顶点V到顶点W的值,UnDist=无穷大;
void Dijkstra(Table T)
{
Vertex v;
while(true)
{
v=找出know为false的Dist最小权值;
if(v==NULL) break;
T[v].know=true;
for w to v //循环此顶点的邻接点
{
if(!T[w].know)
{
if((T[v].Dist+CVW)<T[w].Dist)
{
T[w].Dist=T[v].Dist+CVW;
T[w].FatherVertex=v;
}
}
}
}
}
当权值为负时,也就是有以下这种情况时用下面这种方法,但这种花费时间比上面多(因为它要遍历所有有关顶点,而上面的只要遍历最小值就可以了);
s->u>s->v->u;也就是v->u为负的情况;
void WeightNegative(Table T)
{
Queue q;
Vertex tmpvt;
q=CreateQueue(NumVertex);
MakeEmpty(q);
Enqueue(StartVertex,q); //向队列中插入开始点
while(!IsEmpty(q))
{
tmpvt=Dequeue(q);
for w to v
{
if((T[tmpvt].Dist+CVW)<T[w].Dist)
{
T[w].Dist=T[tmpvt].Dist+CVW;
T[w].FatherVertex=tmpvt;
if(w不在队列q中)
{
Enqueue(w,q);
}
}
}
}
}
在连通情况下求最小生成树的Prim算法(同Dijkstra算法差不多,只是改Dist为V到W的距离(这样保证了各个顶点两两的距离为最优的)):
void MinTree(Table T)
{
Vertex v;
while(true)
{
v=找出know为false的Dist最小权值;
if(v==NULL) break;
T[v].know=true;
for w to v
{
if(!T[w].know)
{
T[w].Dist=Min(CVW,T[w].Dist);
T[w].FatherVertex=v;
}
}
}
}
Kruskal算法计算最小生成树:
void Kruskal(Table T)
{
TreeSet ts;//森林,开始的时候每个顶点为一棵树
Queue H;//优先队列;
Edge E;//边=(顶点1,顶点2)
H=BuldHead(T);
int tmpnum=0;
while(tmpnum<VertexNum-1)
{
E=DeleteMin(H);//得到最小边
Tree ut=Find(E.Vertex1);
Tree vt=Find(E.Vertex2);
if(ut!=vt)
{
tmpnum++;
ConbinTree(ts,ut,vt);//合并树ut和vt
}
}
}
深度优先搜索算法:
下面是一个深度优先搜索的模版
void DFS(Vertex V)
{
Visited[V]=true;
for W to V //顶点V的临接顶点
{
if(!Visited[W])
{
DFS(W);
}
}
}
14、树的遍历:
先序遍历:当前节点先于其儿子进行处理;
中序遍历:先遍历左子树,再遍历当前节点,最后在右子树;
后序遍历:先处理两个子树,最后再处理当前节点;
层序遍历:与其它遍历不同,其遍历方法使用的是一个队列外加一个循环而不是递归;
15、算法设计技巧:
(1)文件压缩算法:正常的ASCII编码等需要的比特数很大,所以人们想到是否提供一种可以降低比特数的编码;
哈夫曼编码:二进制代码可以用二叉树来表示,树只在树叶上有数据,每个字符从要节点开始以左分支为0,右分支为1,以记录路径的方式表示出来。最初先把每个字符作为树,然后依照频率,选取最小的两个进行合并,接着从这个合并树同其它树中找出最小频率,然后再合并,依其类推;
(2)随机数发生器:Seedn+1=(A*Seedn)Mod M
其中当M为素数时,总存在一个A可以使Xn的值周期为M-1(也就是满周期);上面那个算式当A太大时会溢出,所以我们使用以下这个:Seedn+1=A*(Seedn%Q)-R*(Seedn/Q)其中Q为M/A的商,R为M/A的余。















 1260
1260











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









