






大屏:横向四块,纵向三块
天线:插在一个小屏背后主机底部,断开主机底部两根网线,单独调试该小屏幕。

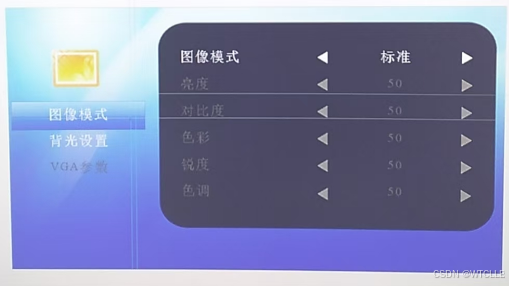
遥控器:INFO、MENU、SOURSE、IDSEL、IDALL、上下左右

按MENU键,弹出菜单首页。
再按右键,进入菜单第二页,拼接设置,ID设置,设置自动分配ID,行列数量(排序从左到右从上到下)。
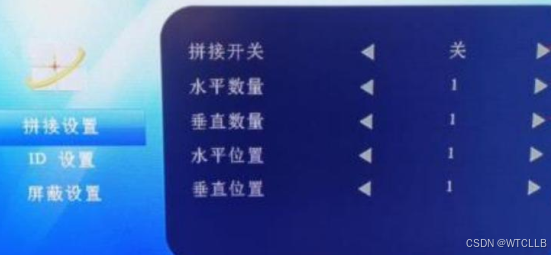
按菜单键退出,按电源键关机和重启,生效。
————————————————————————
厂家说明书如下:

大屏:横向四块,纵向三块
天线:插在一个小屏背后主机底部,断开主机底部两根网线,单独调试该小屏幕。
遥控器:INFO、MENU、SOURSE、IDSEL、IDALL、上下左右
按MENU键,弹出菜单首页。
再按右键,进入菜单第二页,拼接设置,ID设置,设置自动分配ID,行列数量(排序从左到右从上到下)。
按菜单键退出,按电源键关机和重启,生效。
————————————————————————
厂家说明书如下:
 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























