






操作系统常见的进程调度算法
调度算法是指:根据系统的资源分配策略所规定的资源分配算法。常见的进程调度算法有:
1.先来先去服务
2.时间片轮转法
3.多级反馈队列算法
4.最短进程优先
5.最短剩余时间优先
6.最高响应比优先
7.多级反馈队列调度算法
一、先来先去服务
先来先去服务调度算法是一种最简单的调度算法,也称为先进先出或严格排队方案。当每个进程就绪后,它加入就绪队列。当前正运行的进程停止执行,选择在就绪队列中存在时间最长的进程运行。该算法既可以用于作业调度,也可以用于进程调度。先来先去服务比较适合于常作业(进程),而不利于段作业(进程)。
二、时间片轮转法
轮转法是基于适中的抢占策略的,以一个周期性间隔产生时钟中断,当中断发生后,当前正在运行的进程被置于就绪队列中,然后基于先来先去服务策略选择下一个就绪作业的运行。这种技术也称为时间片,因为每个进程再被抢占之前都给定一片时间。
三、最短进程优先
最短进程优先是一个非抢占策略,他的原则是下一次选择预计处理时间最短的进程,因此短进程将会越过长作业,跳至队列头。该算法即可用于作业调度,也可用于进程调度。但是他对长作业不利,不能保证紧迫性作业(进程)被及时处理,作业的长短只是被估算出来的。
四、最短剩余时间优先
最短剩余时间是针对最短进程优先增加了抢占机制的版本。在这种情况下,进程调度总是选择预期剩余时间最短的进程。当一个进程加入到就绪队列时,他可能比当前运行的进程具有更短的剩余时间,因此只要新进程就绪,调度程序就能可能抢占当前正在运行的进程。像最短进程优先一样,调度程序正在执行选择函数是必须有关于处理时间的估计,并且存在长进程饥饿的危险。
五、最高响应比优先
根据比率:R=(w+s)/s (R为响应比,w为等待处理的时间,s为预计的服务时间)
如果该进程被立即调用,则R值等于归一化周转时间(周转时间和服务时间的比率)。R最小值为1.0,只有第一个进入系统的进程才能达到该值。调度规则为:当前进程完成或被阻塞时,选择R值最大的就绪进程,它说明了进程的年龄。当偏向短作业时,长进程由于得不到服务,等待时间不断增加,从而增加比值,最终在竞争中赢了短进程。
和最短进程优先、最短剩余时间优先一样,使用最高响应比策略需要估计预计服务时间。
六、反馈法
如果没有关于进程相对长度的任何信息,则最短进程优先,最短剩余时间、最高响应优先比都不能使用。另一种导致偏向短作业的方法是处罚运行时间较长的作业,换句话说,如果不能获得剩余的执行时间,那就关注已执行了的时间。
方法为:调度基于被抢占原则(按时间片)并使用动态优先级机制。当一个进程第一次进入系统中时,他被放置在一个优先级队列中,当第一次被抢占后并返回就绪状态时,它被放置在下一个低优先级队列中,在随后的时间里,每当被抢占时,他被降级到下一个低优先级队列中。一个短进程很快被执行完,不会在就绪队列中降很多级,一个长进程会逐渐降级。因此先到的进程和短进程优先于长进程和老进程。在每个队列中,除了优先级在最低的队列中之外,都是用简单的先来先去服务机制,一旦一个进程处于优先级最低的队列中,它就不可能在降级,但会重复的返回该队列,直到运行结束。因此,该队列课按照轮转方式调度。
七、多级反馈队列调度算法
多级反馈队列算法,不必事先知道各种进程所需要执行的时间,他是当前被公认的一种较好的进程调度算法。其实施过程如下:
1)设置多个就绪队列,并为各个队列赋予不同的优先级。在优先权越高的队列中,为每个进程所规定的执行时间片就越小。
2)当一个新进程进入内存后,首先放入第一队列的末尾,按照先来先去原则排队等候调度。如果他能在一个时间片中完成,便可撤离;如果未完成,就转入第二队列的末尾,同样等待调度.....如此下去,当一个长作业(进程)从第一队列依次将到第n队列(最后队列)后,便按第n队列时间片轮转运行。
3)仅当第一队列空闲的时候,调度程序才调度第二队列中的进程运行;仅当第1到(i-1)队列空时,才会调度第i队列中的进程运行,并执行相应的时间片轮转。
4)如果处理机正在处理第i队列中某进程,又有新进程进入优先权较高的队列,则此新队列抢占正在运行的处理机,并把正在运行的进程放在第i队列的队尾。
进程调度:
无论是在批处理系统还是分时系统中,用户进程数一般都多于处理机数、这将导致它们互相争夺处理机。另外,系统进程也同样需要使用处理机。
这就要求进程调度程序按一定的策略,动态地把处理机分配给处于就绪队列中的某一个进程,以使之执行。
一、进程的基本状态及状态间的转换:
1.等待态:等待某个事件的完成;
2.就绪态:等待系统分配处理器以便运行;
3.运行态:占有处理器正在运行。
运行态→等待态 往往是由于等待外设,等待主存等资源分配或等待人工干预而引起的。
等待态→就绪态 则是等待的条件已满足,只需分配到处理器后就能运行。
运行态→就绪态 不是由于自身原因,而是由外界原因使运行状态的进程让出处理器,这时候就变成就绪态。例如时间片用完,或有更高优先级的进程来抢占处理器等。
就绪态→运行态 系统按某种策略选中就绪队列中的一个进程占用处理器,此时就变成了运行态

二、处理机
高级、中级和低级调度作业从提交开始直到完成,往往要经历下述三级调度:
高级调度:(High-Level Scheduling)又称为作业调度,它决定把后备作业调入内存运行;
低级调度:(Low-Level Scheduling)又称为进程调度,它决定把就绪队列的某进程获得CPU;
中级调度:(Intermediate-Level Scheduling)又称为在虚拟存储器中引入,在内、外存对换区进行进程对换。
三、进程调度的算法及思想
1.先来先服务调度算法
先来先服务(FCFS)调度算法是一种最简单的调度算法,该算法既可用于作业调度,也可用于进程调度。当在作业调度中采用该算法时,
每次调度都是从后备作业队列中选择一个或多个最先进入该队列的作业,将它们调入内存,为它们分配资源、创建进程,然后放入就绪
队列。在进程调度中采用FCFS算法时,则每次调度是从就绪队列中选择一个最先进入该队列的进程,为之分配处理机,使之投入运行。
该进程一直运行到完成或发生某事件而阻塞后才放弃处理机。
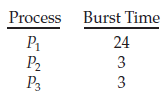
来看一个例子,假设有三个进程和它们各自执行时间(以毫秒为单位)如下表:
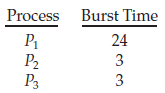
那么如果三个进程按照P1, P2, P3的顺序启动的话,按照先到先服务的调度算法,执行过程如下:

平均等待时间就是(0 + 24 + 27) / 3 = 17毫秒。FCFS算法是非抢占式的,一旦内核将CPU分配给一个进程就不会被释放
了,除非进程结束或者请求I/O阻塞。这也是我们之前学习的多任务系统的特点。
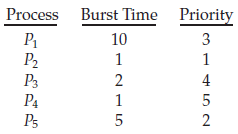
2、基于优先级调度 (Priority Scheduling)
在优先级调度算法中,每个进程都关联一个优先级,内核将CPU分配给最高优先级的进程。具有相同优先级的进程,按照
先来先服务的原则进行调度。假设进程的执行时间和优先级如下,并且这些进程同时存在于内存中时,内核基于优先级的
调度过程如下:

采取基于优先级调度算法要考虑进程饿死的问题,因为高优先级的进程总是会被优先调度,具有低优先级的进程可能永远
都不会被内核调度执行。Aging是对于这个问题的一个解决方案,所谓Aging就是指逐渐提高系统中长时间等待的进程的
优先级。比如如果优先级的范围从127到0(127表示最低优先级),那么我们可以每15分钟将等待进程的优先级加1。最终
经过一段时间,即便是拥有最低优先级127的进程也会变成系统中最高优先级的进程,从而被执行。
优先级调度可以抢占式或者非抢占式的。当一个进程在Ready队列中时,内核将它的优先级与正在CPU上执行的进程的优先级
进行比较。当发现这个新进程的优先级比正在执行的进程高时:对于抢占式内核,新进程会抢占CPU,之前正在执行的进程
转入Ready队列;对于非抢占式内核,新进程只会被放置在Ready队列的头部,不会抢占正在执行的进程。
3、短进程优先(SCBF--Shortest CPU Burst First)
最短CPU运行期优先调度算法(SCBF--Shortest CPU Burst First)
该算法从就绪队列中选出下一个“CPU执行期最短”的进程,为之分配处理机。
最短作业优先调度是优先级调度的特例。在优先级调度中我们根据进程的优先级来进行调度,在最短作业优先调度中我们
根据作业的执行时间长短来调度。通过下面的例子来看看SJF是怎样调度的。
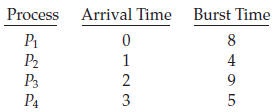

进程1首先执行了1毫秒,当执行时间更短的进程2进入Ready队列时发生抢占。进程3在进程2执行1毫秒后到来,但是进程3的
执行时间比进程2长。同理进程4的到来也没法抢占进程2,所以进程2可以一直执行到结束。之后是执行时间第二短的进程4
执行,最后是进程1(要看剩余执行时间,还剩7毫秒)和进程3。
SJF调度是最优的调度,但难点在于如何预测进程的执行时间(Burst Time)。对于批处理系统中的长期调度来说,可以将用户
提交进程时输入的执行时间上限作为依据。但对于短期调度来说,没有办法能够提前得知下一个要被分配CPU的进程的执行
时间长短。我们只能通过历史数据来进行预测,公式如下:
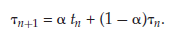
α可以取0.5,公式前半部分表示最近一次Burst Time,而后半部分表示过去历史平均的Burst Time。
该算法虽可获得较好的调度性能,但难以准确地知道下一个CPU执行期,而只能根据每一个进程的执行历史来预测。
4、轮转法 (Round-Robin Scheduling) (RR)
前几种算法主要用于批处理系统中,不能作为分时系统中的主调度算法,在分时系统中,都采用时间片轮转法。
简单轮转法:系统将所有就绪进程按FIFO规则排队,按一定的时间间隔把处理机分配给队列中的进程。这样,就绪
队列中所有进程均可获得一个时间片的处理机而运行。多级队列方法:将系统中所有进程分成若干类,每类为一级。
RR调度算法转为分时系统设计,它与FCFS很像,但是加入了抢占。具体调度过程是:内核从Ready队列中选取第一个进程,
将CPU资源分配给它,并且设置一个定时器在一个时间片后中断该进程,调度Ready队列中的下一进程。很明显,RR调度
算法是抢占式的,并且在该算法的调度下,没有一个进程能够连续占用CPU超过一个时间片,从而达到了分时的目的。
来看下面的例子,假设一个时间片的长度为4毫秒:

5、高响应比优先调度算法
(1) 如果作业的等待时间相同,则要求服务的时间愈短,其优先权愈高,因而该算法有利于短作业.
(2) 当要求服务的时间相同时,作业的优先权决定于其等待时间,等待时间愈长,其优先权愈高,因而它实现的是先来先服务.
(3) 对于长作业,作业的优先级可以随等待时间的增加而提高,当其等待时间足够长时,其优先级便可升到很高, 从而也可获得处理机.
该算法照顾了短作业,且不会使长作业长期得不到服务
6、抢占式调度算法
1. 非抢占式调度算法
为每一个被控对象建立一个实时任务并将它们排列成一轮转队列,调度程序每次选择队列中的第一个任务投入运行.该任务完成后便把它挂在轮转队列的队尾等待下次调度运行.
2. 非抢占式优先调度算法.
实时任务到达时,把他们安排在就绪队列的对首,等待当前任务自我终止或运行完成后才能被调度执行.
3. 抢占式调度算法
1)基于时钟中断的抢占式优先权调度算法.
实时任务到达后,如果该任务的优先级别高于当前任务的优先级并不立即抢占当前任务的处理机,而是等到时钟中断到来时,调度程序才剥夺当前任务的执行,将处理机分配给新到的高优先权任务.
2)立即抢占的优先权调度算法.
在这种调度策略中,要求操作系统具有快速响应外部时间中断的能力.一旦出现外部中断,只要当前任务未处于临界区便立即剥夺当前任务的执行,把处理机分配给请求中断的紧迫任务,实时进程调度,实时进程抢占当前。

















 1102
1102

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









