







 本文深入探讨了在MDP未知的情况下,强化学习中的模型自由预测问题。首先,介绍了无模型强化学习(model-free RL)的基本思想,以及在环境未知时如何通过与环境交互来估计价值函数。接着,详细阐述了蒙特卡罗(MC)方法和时序差分(TD)学习,包括它们的基本原理、特点、收敛性以及增量式实现。MC方法通过完整的episode计算期望回报,而TD方法则利用即时反馈进行连续更新。最后,对比了MC和TD在偏差、方差、收敛速度和利用马尔可夫性方面的差异,并讨论了在评估q(s,a)时的挑战和解决方案。
本文深入探讨了在MDP未知的情况下,强化学习中的模型自由预测问题。首先,介绍了无模型强化学习(model-free RL)的基本思想,以及在环境未知时如何通过与环境交互来估计价值函数。接着,详细阐述了蒙特卡罗(MC)方法和时序差分(TD)学习,包括它们的基本原理、特点、收敛性以及增量式实现。MC方法通过完整的episode计算期望回报,而TD方法则利用即时反馈进行连续更新。最后,对比了MC和TD在偏差、方差、收敛速度和利用马尔可夫性方面的差异,并讨论了在评估q(s,a)时的挑战和解决方案。
- 参考:
- 周博磊老师的教程
- Reinforcement Learning Course by David Silver
- Richard S.Sutton 《Reinforce Learning》第5章、第6章
- 强化学习(四)用蒙特卡罗法(MC)求解
- 强化学习(五)用时序差分法(TD)求解
- 上一节我们探讨了环境MDP已知(model-based)情况下的 prediction 和 control 问题(强化学习笔记(3)—— MDP中的prediction和control问题);本节主要讨论 MDP 未知时的prediction问题,MDP未知时的control问题下一篇再讨论
- 符号说明:本文用 S t S_t St 或 s 代表当前时刻 t 的状态, S t + 1 S_{t+1} St+1 或 s’ 代表下一时刻的状态; A t A_t At 或 a 代表当前时刻 t 的动作, A t + 1 A_{t+1} At+1 或 a’ 代表下一时刻的动作
文章目录
1 引入
- 上一节我们探讨了解 prediction 问题的 policy evaluation 算法、解 control 问题的 policy iteration 和 value iteration 算法,它们都是 Model-based 方法,要求输入一个给定的 MDP(需要访问环境,包括状态转移矩阵和奖励函数)
- 但很多情况下 MDP 是未知的,这时核心问题就发生了变化
- Model-free prediction:Estimate value function of an unknown MDP
- Model-free control::Optimize value function of an unknown MDP
1.1 回顾model-based prediction问题
1.1.1 policy evaluation算法
- 使用MDP的Bellman公式反复迭代计算至收敛

- 常使用DP方法实现这个迭代
1.1.2 小结
- 在MDP已知的情况下,Agent已经知道了环境的状态转移
P
P
P 和状态奖励
R
R
R,即全观测(fully observable)。 这时Agent不需要再探索环境,直接利用
P
P
P 和
R
R
R 迭代求
V
∗
V^*
V∗ 和
π
∗
\pi^*
π∗ 即可 (上面红色的部分),就好像玩游戏开了透视挂一样

- 但在对于很多问题,MDP要么未知,要么虽然已知但因为过于庞大/复杂而无法使用 (如电子游戏、无人机控制…)这些情况下状态太多,转移太复杂,没法给出P和R,也就无法进行iteration计算,这时就可以考虑使用model-free的强化学习方法
1.2 model-free RL
-
无模型强化学习通过和环境进行交互来解决问题

-
Agent不能直接获取状态转移矩阵P和奖励函数R
-
Agent的每次交互过程,会采集一条
轨迹(Trajectories/episodes),Agent要收集大量的轨迹,然后从中获取信息,改进策略,以求获得更多的奖励 -
一条轨迹是一个 “状态、动作、奖励” 序列,如
{ S 1 , A 1 , R 2 , S 2 , A 2 , . . . S t , A t , R t + 1 , . . . R T , S T } \{S_1,A_1,R_2,S_2,A_2,...S_t,A_t,R_{t+1},...R_T,S_T\} {S1,A1,R2,S2,A2,...St,At,Rt+1,...RT,ST} -
下面介绍model-free RL的两种常用方法
- 蒙特卡罗方法(
MC):Monte Carlo Method - TD学习方法 (
TD) :Temporal Difference Learning
- 蒙特卡罗方法(
2. Monte-Carlo Method(MC)Prediction
2.1 思想
-
以policy π \pi π 大量进行轨迹采样,找到其中所有的状态 s s s,分别计算return G t G_t Gt,用这些 G t G_t Gt 的期望(均值)作为 s s s 的价值 v π ( s ) v^{\pi}(s) vπ(s)
- Return: G t = R t + 1 + γ R t + 2 + γ 2 R t + 3 + . . . G_t = R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} +... Gt=Rt+1+γRt+2+γ2Rt+3+... under policy π \pi π
- v π ( s ) = E γ , π [ G t ∣ S t = s ] v^{\pi}(s) = \mathbb{E}_{\gamma,\pi}[G_t|S_t = s] vπ(s)=Eγ,π[Gt∣St=s]
根据大数定律,当采集的轨迹足够多时, v ( s ) → v π ( s ) v(s) \to v^{\pi}(s) v(s)→vπ(s)
-
在MC方法中,定义
MC target: G t G_t GtMC error: δ t = G t − v ( S t ) \delta_t = G_t-v(S_t) δt=Gt−v(St) 我们利用它修正 v ( S t ) v(S_t) v(St)
2.2 特点
-
MC 方法从经验中直接估算值函数 V V V 和策略 π \pi π(learn directly from episodes of experience),使用经验平均return(empirical mean return)代替数学期望 return(expected return),因此当状态价值不随时间改变(即处于稳定情况stationary)时,轨迹采样越多学习效果越好
-
MC 方法是 model-free 的,不要求 MDP 的转移矩阵 P P P 或奖励 R R R,不需要bootstrapping,甚至不假设状态具有 markov property
-
MC 需要的轨迹必须是 “经历完整的”(all episodes must terminate)。
所谓的经历完整,就是这个序列必须要达到终止状态,比如下棋问题分出输赢,驾车问题成功到达终点或者失败
因为 V V V 的定义是 v π ( s ) = E π [ G t ∣ S t = s ] v^{\pi}(s) = \mathbb{E}_{\pi}[G_t|S_t = s] vπ(s)=Eπ[Gt∣St=s],而 G t G_t Gt 的定义是episode中从第 t t t 步到最后的奖励加权和,因此 episode 必须到终止状态,否则计算的就不是 G t G_t Gt 了,得出的不是状态 s s s 的真正价值。换句话说,只有等到episode终止,我们才能反向计算 G t G_t Gt 并修正 v ( S t ) v(S_t) v(St)
-
只有在一个 episode 学完后,价值估计和策略才会改变。因此,MC方法在逐个完整轨迹的意义上是增量的(“episode by episode”),而不是在每个单步的意义上增量(not “step by step”),TD 学习可以做到后者
2.3 两类MC prediction方法
- episode中出现一次 “状态
s/二元组(s,a)”,称为对 “状态s/二元组(s,a)” 的一次访问(visit) - “状态
s/二元组(s,a)” 可能在同一个episode中多次出现,以此可以把MC方法分成两类
2.3.1 首次访问型 MC
- first-visit MC:仅把状态序列中第一次出现该状态时的收获值纳入到 return 平均值的计算中

- 这里用Returns这个list存储每个状态s从episode中提取的若干return G t G_t Gt
- 对于每个轨迹从后往前递推地计算 G t G_t Gt
Unless可以理解为if not,仅保留轨迹中状态s第一次出现时的return
2.3.2 每次访问型 MC
- every-visit MC:针对一个状态序列中每次出现的该状态,都计算对应的收获值并纳入到收获平均值的计算中
- 这种方式的伪代码和上面的很像,只要把
Unless判断那句去掉就行了 - 这种方法比第一种的计算量要大一些,但是在完整的经历样本序列少的场景下会比第一种方法适用。
- 这种方式的伪代码和上面的很像,只要把
2.3.3 收敛性
- 当对
s
s
s 或
(
s
,
a
)
(s,a)
(s,a) 的访问次数足够大时,这两种方法都可以收敛到
V
π
V^{\pi}
Vπ 或
Q
π
Q^{\pi}
Qπ。
- 对于 first-visit MC方法来说,从每个 s s s 或 ( s , a ) (s,a) (s,a) 所在的episode中获取一个 return 作为对 V V V 或 Q Q Q 的估计,这些return以有限的方差服从i.i.d分布,根据大数定律,这些return的平均值收敛于它们的期望值。每个平均值本身是一个无偏估计,其误差的标准差为 1 N \frac{1}{\sqrt N} N1 (N是return的数量)
- 对于 every-visit MC方法,这一点不是很直观。可以证明这种方法的估计会二次收敛到 V π ( s ) V^{\pi}(s) Vπ(s) (相关文章:Singh和Sutton, 1996)
2.4 增量式实现
- 看上面两种MC方法的伪代码,其中求均值的部分可以改成增量形式,这样就只需要保存上一轮迭代得到的收获均值与次数,无论数据量是多还是少,算法需要的内存基本是固定的
- 一个增量式求均值的推导如下

2.4.1 稳定情况(stationary)
- 当policy π \pi π 固定时, V V V 或 Q Q Q 也不随时间变化,这时我们采集的episode越多,估计效果越好
- 以增量形式改写伪代码
- 前略…
- Collect one episode { S 1 , A 1 , R 2 , S 2 , A 2 , . . . S t , A t , R t + 1 , . . . R T , S T } \{S_1,A_1,R_2,S_2,A_2,...S_t,A_t,R_{t+1},...R_T,S_T\} {S1,A1,R2,S2,A2,...St,At,Rt+1,...RT,ST}
- 每次访问到状态
S
t
S_t
St时,计算return
G
t
G_t
Gt并以增量形式更新
V
(
S
t
)
V(S_t)
V(St)
N ( S t ) ← N ( S t ) + 1 v ( S t ) ← v ( s t ) + 1 N ( S t ) ( G t − v ( S t ) ) \begin{aligned} N(S_t) &\leftarrow N(S_t) + 1 \\ v(S_t) &\leftarrow v(s_t) + \frac{1}{N(S_t)}(G_t - v(S_t)) \end{aligned} N(St)v(St)←N(St)+1←v(st)+N(St)1(Gt−v(St))
注意这里的 S t S_t St下标不代表迭代轮次,而是在代表轨迹中 t 时刻采样的这个状态s
- 如果要估计状态价值函数,方法完全类似,只要把更新V换成下面这个更新q即可
q ( S t , A t ) ← q ( S t , A t ) + 1 N ( S t , A t ) ( G t − q ( S t , A t ) ) q(S_t,A_t) \leftarrow q(S_t,A_t) + \frac{1}{N(S_t,A_t)}(G_t - q(S_t,A_t)) q(St,At)←q(St,At)+N(St,At)1(Gt−q(St,At))
2.4.2 不稳定情况(nonstationary)
-
在真实的RL环境中,比如 Control 问题,我们往往要提升 Policy,这时策略评估和策略提升交替进行(Generalized Policy iteration)。面对一个不停变化的 Policy, V , Q V,Q V,Q 也在随时间不断变化,我们采样的episode就不是越多越好了,因为越早期的采样的episode,其服从的Policy和当前相差越多,我们需要 “忘记” 一些太老的 G t G_t Gt
-
一个常用的方法是设定一个均值计算步长,这有点像滑动均值滤波,我们只用最近若干次采样的 G t G_t Gt 来估计V(s)。设步长为n,并设 1 n = α \frac{1}{n} = \alpha n1=α,有
v ( S t ) = 1 n ( G t + ( n − 1 ) v ( S t ) ) = α ( G t + ( 1 α − 1 ) v ( S t ) ) = v ( S t ) + α ( G t − v ( S t ) ) \begin{aligned} v(S_t) &= \frac{1}{n}(G_t + (n-1)v(S_t)) \\ &= \alpha(G_t + (\frac{1}{\alpha}-1)v(S_t)) \\ &= v(S_t) +\alpha(G_t-v(S_t)) \end{aligned} v(St)=n1(Gt+(n−1)v(St))=α(Gt+(α1−1)v(St))=v(St)+α(Gt−v(St))我们把 α \alpha α 称为学习率,用来调节 v ( S t ) v(S_t) v(St) 的更新速度。 v ( S t ) = v ( S t ) + α ( G t − v ( S t ) ) v(S_t) = v(S_t) +\alpha(G_t-v(S_t)) v(St)=v(St)+α(Gt−v(St))这个式子,可以直观地理解为我们不断地用新算出的 G t G_t Gt 来修正对 v ( S t ) v(S_t) v(St) 的估计,调整的多少由学习率 α \alpha α 控制。这种方法一般称为
α-MC -
如果要估计状态价值函数,方法完全类似,只要把更新V换成下面这个更新q即可
q ( S t , A t ) ← q ( S t , A t ) + α ( G t − q ( S t , A t ) ) q(S_t,A_t) \leftarrow q(S_t,A_t) +\alpha(G_t - q(S_t,A_t)) q(St,At)←q(St,At)+α(Gt−q(St,At))
2.5 比较 MC 和 DP 算法
2.5.1 算法思想
-
DP方法中,使用了 自举(bootstrapping) 的思想,通过上一轮估计的 V i − 1 V_{i-1} Vi−1 来引导这一轮估计的 V i V_i Vi,具体方法是在bellman等式上进行迭代

-
MC方法中,是使用来自大量采样轨迹的经验平均收益(empirical mean return)代替数学期望来估计 V i V_i Vi。对于每个状态的估计是完全独立的,不依赖于对其他状态的估计(完全不使用bootstrapping的思想)

2.5.2 覆盖状态
- 使用MC方法进行prediction时,不一定覆盖到 MDP 中所有的状态s。这是因为我们评估的是Policy π \pi π,通过不停执行这个策略来评估可以被 π \pi π 覆盖到的状态的价值,对于那些Policy π \pi π没有涉及到的状态,其价值对于 prediction 问题没有意义,所以不需要考虑
- 在DP方法中我们执行全宽度回溯,每轮迭代会计算所有状态的价值。对于Policy π \pi π 没有涉及到的状态,虽然在 P ( s ′ ∣ s , a ) = 0 P(s'|s,a) = 0 P(s′∣s,a)=0 的限制下不会更新,但它们依然被考虑并计算,而MC根本不会处理到它们。
2.5.3 优缺点
- MC相对DP的好处
- MC方法不需要知道 MDP,是一个Model- free的方法
- MC每轮更新只需要计算一条轨迹,其代价和状态数量、转移数量无关;而DP使用全宽度(full-width)的回溯机制更新行状态价值,每轮迭代需要计算并保存所有状态价值,这在状态多、转移复杂的情况下会非常慢
- 由于不使用自举的思想,每个状态的估计不依赖于其他状态的估计,当环境中马尔可夫性质不成立时,MC方法的性能损失较小
- MC相对DP的缺点:
- 只能用在有有终止的 MDP 上 (each episode terminates)
- 每次采样都需要一个完整的状态序列。如果我们没有完整的状态序列,或者很难拿到较多的完整的状态序列,这时候蒙特卡罗法就不太好用了
3. Temporal-Difference Learning (TD) Prediction
3.1 思想
-
回顾MC方法,我们计算每个轨迹的episode的 G t G_t Gt ,并采用以下方式修正 V V V的估计值
v ( S t ) ← v ( s t ) + 1 N ( S t ) ( G t − v ( S t ) ) v(S_t) \leftarrow v(s_t) + \frac{1}{N(S_t)}(G_t - v(S_t)) v(St)←v(st)+N(St)1(Gt−v(St)) 使用类似 MRP 中的 Bellman 等式, G t G_t Gt 可以被分解成立即奖励和未来奖励两部分
G t = R t + 1 + γ R t + 2 + γ 2 R t + 3 + . . . = R t + 1 + γ ( R t + 2 + γ R t + 3 + . . . ) = R t + 1 + γ G t + 1 \begin{aligned} G_t &= R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} +... \\ &= R_{t+1} + \gamma (R_{t+2} + \gamma R_{t+3} +...) \\ &= R_{t+1} + \gamma G_{t+1} \end{aligned} Gt=Rt+1+γRt+2+γ2Rt+3+...=Rt+1+γ(Rt+2+γRt+3+...)=Rt+1+γGt+1根据 V V V 的定义,有
v π ( S t ) = E π [ G t ∣ S t = s ] = E π [ R t + 1 + γ G t + 1 ∣ S t = s ] = E π [ R t + 1 + γ v π ( S t + 1 ) ∣ S t = s ] \begin{aligned} v^{\pi}(S_t) &= \mathbb{E}_{\pi}[G_t|S_t = s] \\ &= \mathbb{E}_{\pi}[R_{t+1} + \gamma G_{t+1}| S_t = s] \\ &= \mathbb{E}_{\pi}[R_{t+1} + \gamma v^{\pi}(S_{t+1})|S_t = s] \end{aligned} vπ(St)=Eπ[Gt∣St=s]=Eπ[Rt+1+γGt+1∣St=s]=Eπ[Rt+1+γvπ(St+1)∣St=s] -
这启发我们用 R t + 1 + γ v ( S t + 1 ) R_{t+1} + \gamma v(S_{t+1}) Rt+1+γv(St+1) 代替 MC 方法中的 G t G_t Gt,也就是说
- MC 中,我们希望 v π ( s ) v_\pi(s) vπ(s) 和 q π ( s , a ) q_\pi(s,a) qπ(s,a) 靠近 G t G_t Gt
- TD 中,我们希望 v π ( s ) v_\pi(s) vπ(s) 靠近 r t + 1 + γ v π ( s ′ ) r_{t+1}+\gamma v_\pi(s') rt+1+γvπ(s′); q π ( s , a ) q_\pi(s,a) qπ(s,a) 靠近 r t + 1 + γ q π ( s ′ , a ′ ) r_{t+1}+\gamma q_\pi(s',a') rt+1+γqπ(s′,a′)
这个想法是合理的,以状态价值为例, v π ( s ) v_\pi(s) vπ(s) 和 r t + 1 + γ v π ( s ′ ) r_{t+1}+\gamma v_\pi(s') rt+1+γvπ(s′) 都是当前对真实价值的估计,有 E [ v π ( s ) ] = E [ r t + 1 + γ v π ( s ′ ) ] \mathbb{E}[v_\pi(s)] = \mathbb{E}[r_{t+1}+\gamma v_\pi(s')] E[vπ(s)]=E[rt+1+γvπ(s′)] 而后者包含一个真实得到的奖励 r t + 1 r_{t+1} rt+1,因此比纯粹估计更准确一些,应当让估计朝着向它靠近的方向更新。另外,因为 TD 中的 episode 不完整没有对应次数N,使用 α ∈ [ 0 , 1 ] \alpha \in [0,1] α∈[0,1] 作为修正步长。价值更新公式如下
v ( S t ) = v ( S t ) + α [ ( R t + 1 + γ v ( S t + 1 ) ) − v ( S t ) ] q ( S t , A t ) = q ( S t , A t ) + α [ ( R t + 1 + γ q ( S t + 1 , A t + 1 ) ) − q ( S t , A t ) ] \begin{aligned} &v(S_t) = v(S_t) +\alpha[(R_{t+1} + \gamma v(S_{t+1}) )-v(S_t)]\\ &q(S_t,A_t) = q(S_t,A_t) +\alpha[(R_{t+1} + \gamma q(S_{t+1},A_{t+1}) )-q(S_t,A_t)] \end{aligned} v(St)=v(St)+α[(Rt+1+γv(St+1))−v(St)]q(St,At)=q(St,At)+α[(Rt+1+γq(St+1,At+1))−q(St,At)] 用这两个代替 MC 方法中的价值更新公式,我们就得到了 TD(0)方法,也叫单步TD -
在TD(0)中,定义
TD target: R t + 1 + γ v ( S t + 1 ) R_{t+1} + \gamma v(S_{t+1}) Rt+1+γv(St+1)TD error: δ t = R t + 1 + γ v ( S t + 1 ) − v ( S t ) \delta_t = R_{t+1} + \gamma v(S_{t+1})-v(S_t) δt=Rt+1+γv(St+1)−v(St) 我们利用它修正 v ( S t ) v(S_t) v(St)
3.2 特点
- TD方法是一种介于MC和DP之间的算法
- TD方法直接通过采样的经验轨迹学习,因此不需要知道MDP的转移矩阵 P P P 和奖励 R R R,是一个model-free的方法
- TD方法融合了 DP 中自举(bootstrapping)的思想,即利用当前的估计值来更新估计值。
- 相比于MC方法必须等到episode终止才能反向计算 G t G_t Gt,TD(0)算法只需要等到下一个时刻确定 S t + 1 S_{t+1} St+1 后就可以立即进行一步更新。可以说MC的更新是 “episode by episode” 的离线策略,TD的更新是“step by step” 的在线策略。因此TD方法可以从不完整的轨迹(incomplete episodes)中学习
3.3 收敛性
- TD 方法使用了 bootstrapping 思想,从一个猜测中计算另一个猜测,而非等待实际的结果,这看起来有一点不可靠。幸运的是,我们已经证明了,对于任何策略
π
\pi
π ,TD(0)都可以收敛到
v
π
(
s
)
v_{\pi}(s)
vπ(s) 或
q
π
(
s
,
a
)
q_{\pi}(s,a)
qπ(s,a)。
- 如果使用一个足够小的步长 α \alpha α,那么它的均值能收敛到 v π ( s ) v_{\pi}(s) vπ(s) 或 q π ( s , a ) q_{\pi}(s,a) qπ(s,a)
- 如果步长参数
α
\alpha
α 根据下面这个随机近似条件逐渐变小,则它能以概率 1 收敛
∑ n = 1 ∞ α n ( a ) = ∞ 且 ∑ n = 1 ∞ α n 2 ( a ) < ∞ \sum_{n=1}^{\infty} \alpha_n(a) = \infty 且 \sum_{n=1}^{\infty} \alpha_n^2(a) < \infty n=1∑∞αn(a)=∞且n=1∑∞αn2(a)<∞
- 大致来说
- MC方法把 G t G_t Gt 作为估计目标。MC 得到的之所以是估计值而不是准确值,是因为每一条episode得到的 G t G_t Gt 都是一个定值, E π [ G t ∣ S t = s ] \mathbb{E}_{\pi}[G_t|S_t = s] Eπ[Gt∣St=s] 中这个期望不知道,只能通过大量采样,使用经验均值估计数学期望
- TD方法把 R t + 1 + γ V ( S t + 1 ) R_{t+1} + \gamma V(S_{t+1}) Rt+1+γV(St+1) 作为估计目标。TD方法得到的之所以是估计值而不是准确值,不是因为 E Π [ R t + 1 + γ V Π ( S t + 1 ) ∣ S t = s ] \mathbb{E}_{\Pi}[R_{t+1} + \gamma V^{\Pi}(S_{t+1})|S_t = s] EΠ[Rt+1+γVΠ(St+1)∣St=s] 这里期望的原因。 TD方法一边和环境交互一边修正 V V V,采样 S t + 1 S_{t+1} St+1 时 MDP 环境中的转移矩阵 P P P 和策略 π \pi π 都发挥了作用,故每次更新使用的 TD error 都是概率采样的(不像MC方法中一样是固定值),可以说环境模型已经完整地提供了这个期望。真正的原因是 真实的 v ( S t + 1 ) v(S_{t+1}) v(St+1) 不知道,所以只能用当前估计的 v ( S t + 1 ) v(S_{t+1}) v(St+1) 来代替
- 注意到每次的 TD error
δ
t
\delta_t
δt 是当时所做估计的误差。因为TD误差取决于
S
t
+
1
S_{t+1}
St+1 和
R
t
+
1
R_{t+1}
Rt+1,所以它实际上要到一个时间步骤之后才能得到。也就是说
δ
t
\delta_t
δt 是
V
(
S
t
)
V(S_t)
V(St) 中的误差,在时间
t
+
1
t+1
t+1 时可用。另外要注意的是,如果价值数组
V
V
V 在一个episode中不发生变化(比如MC方法中就是如此),那么蒙特卡洛误差可以写成TD误差之和

如果价值函数V在周期中被更新了(就像TD(0)中那样),那么这个等式就不准确,但是如果更新时的修正步长 α \alpha α 很小,那么它仍然可以近似成立。这个等式的泛化在在推广在TD学习的理论和算法中起着重要作用
3.4 伪代码
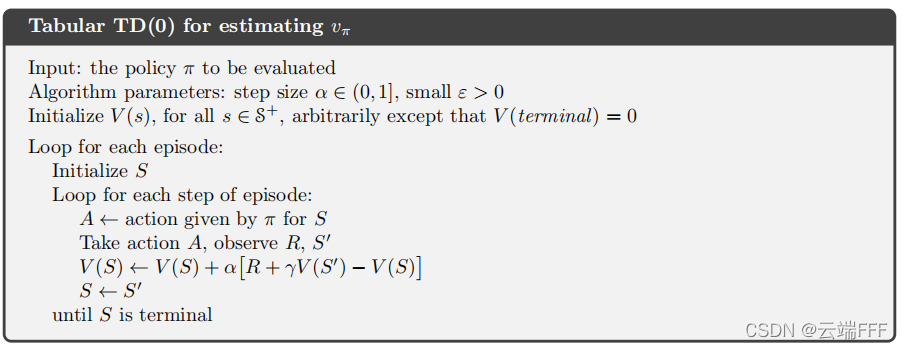
- 下面给出TD(0)的伪代码
3.5 推广
-
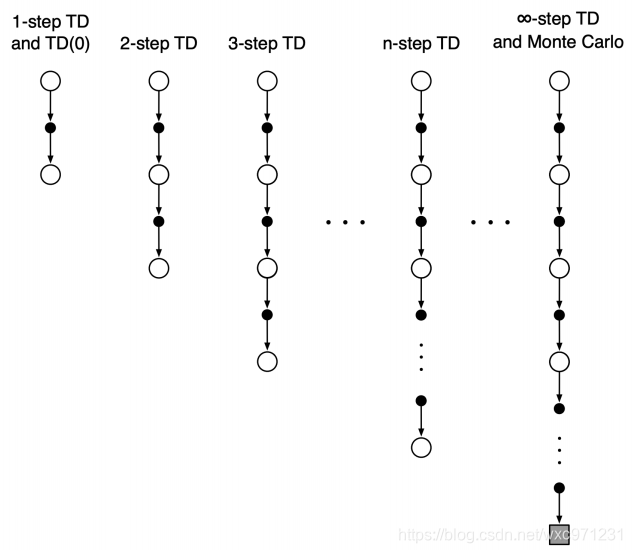
TD(0) / 单步TD 是一种最简单的特殊情况,它可以在两个方向扩展
- 所谓
单步TD,是指我们在更新之前只运行了一步,从状态 S t S_t St转移到状态 S t + 1 S_{t+1} St+1后就立刻进行更新。我们也可以在一次更新之前运行多步,这样的方法称作n步TD,当n越来越大直到 n = h o r i z o n n = horizon n=horizon 时,TD方法变为MC方法
- 所谓
TD(0),括号里的这个0其实是一个超参数,它可以在 [ 0 , 1 ] [0,1] [0,1]取值,扩展后的方法称为TD(λ)
- 所谓
-
关于这两种扩展内容也比较多,后面再单独开写文章说明吧
4. 对比 MC 和 TD(prediction 角度)
4.1 示例 —— 开车回家
-
本例子出自 Richard S.Sutton 《Reinforce Learning》 第二版
-
每天当你下班开车回家时,你会估计一下回家需要多长时间。假设在这个星期五,你正好在6点钟离开,估计需要30分钟才能到家。当你到达你的车时,已经是6:05,你注意到开始下雨了。交通状况在雨中的速度往往比较慢,所以你重新估计从那时起需要35分钟,也就是总共40分钟。15分钟后,你按时完成了高速公路部分的行程。当你驶入一条二级公路时,你将你估计的总行程时间缩短到35分钟。不幸的是,此时你被一辆缓慢的卡车卡在后面,而且道路太窄,无法通过。最后你不得不跟着卡车走,直到6点40分转入你住的小街。三分钟后你到家了。这一条episode总结如下

-
在这个例子中,reward是每一段行程消耗的时间(如果这是一个求最短行程时间的控制问题,则我们会使用负的收益,但这里我们只考虑 prediction 问题,为了简单,我们使用正收益)。使用表格中 “经过的时间” 这一列中相邻两个值做差来计算R。比如下高速这个状态的奖励就是 30-20=10
-
过程的衰减系数 γ = 1 \gamma = 1 γ=1,即每个状态的return G t G_t Gt 是从此到家的剩余时间,可以用总时间 43 和第一列 “已经过时间” 做差计算。
-
每个状态的价值是从此到家的剩余时间的期望。
-
表格中 “估计剩余时间” 这一列即是刚进入此状态时获得的对 v ( s ) v(s) v(s) 的估计值,用作TD中的 v ( S t + 1 ) v(S_{t+1}) v(St+1)、MC中的 v ( S t ) v(S_t) v(St)
-
表格中 “估计总时间” 为同一行前两列的值相加,做差代表MC和TD方法的
target error。这一点比较重要,不然下面的图可能会看不懂。请看下面的分析 -
现在分别使用
1-MC方法和TD(0)方法对这个episode进行prediction,如下
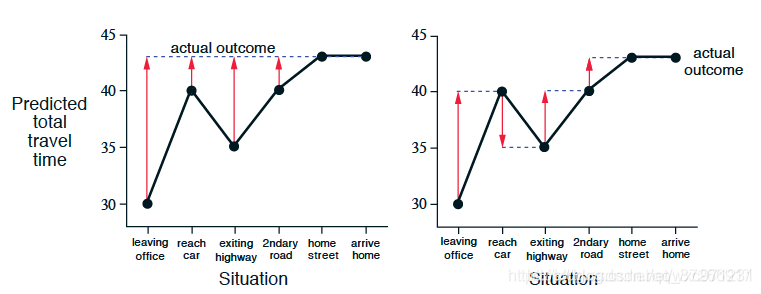
图中左边是1-MC方法,右边是TD(0)方法。红色箭头表示两算法给出的对每个状态的价值修正值。 -
这个图画的有点难看懂,下面以 “下高速” 时刻为例进行解释。设 “下高速” 为状态 S t S_t St,下一个状态 “被卡车挡住” 为状态 S t + 1 S_{t+1} St+1,最后到家为终态 S e n d S_{end} Send。有 R t + 1 = 30 − 20 = 10 R_{t+1} = 30-20=10 Rt+1=30−20=10, G t = 43 − 20 = 23 G_t = 43-20=23 Gt=43−20=23。另外根据使用的方法, α = γ = 1 \alpha = \gamma = 1 α=γ=1
-
1-MC方法:
V ( S t ) = V ( S t ) + α ( G t − V ( S t ) ) = 15 + [ ( 43 − 20 ) − 15 ] = 23 \begin{aligned} V(S_t) &= V(S_t) + \alpha(G_t-V(S_t)) \\ &=15+[(43-20)-15] \\ &=23 \end{aligned} V(St)=V(St)+α(Gt−V(St))=15+[(43−20)−15]=23 可见由于仅有一个episode,状态价值直接变为了这个episode中此状态的return G t G_t Gt。图里的红色线,表现的是表格中状态 S t S_t St和 S e n d S_{end} Send 的第三列 “预测总时间” 的差值,而第三列又是前两列的和,把这个差转换为 (经过的时间+估计剩余时间 V ( s ) V(s) V(s)) 的差,两个 “经过的时间” 做差算出的是 G t G_t Gt,而终止状态 S e n d S_{end} Send的 “估计剩余时间” V ( S e n d ) = 0 V(S_{end}) = 0 V(Send)=0,于是红线代表的就是 G t − V ( s ) G_t - V(s) Gt−V(s) 这个差值了,这正是MC方法的target error,即 “状态的价值修正值” -
TD(0) 方法:
V ( S t ) = V ( S t ) + α [ ( R t + 1 + γ V ( S t + 1 ) ) − V ( S t ) ] = 15 + 1 ∗ [ 10 + 1 ∗ 10 − 15 ] = 20 \begin{aligned} V(S_t) &= V(S_t) +\alpha[(R_{t+1} + \gamma V(S_{t+1}) )-V(S_t)] \\ &=15+1*[10+1*10-15] \\ &=20 \end{aligned} V(St)=V(St)+α[(Rt+1+γV(St+1))−V(St)]=15+1∗[10+1∗10−15]=20 图里的红色线,表现的是表格中状态 S t S_t St和 S t + 1 S_{t+1} St+1 的第三列 “预测总时间” 的差值,而第三列又是前两列的和,同样把这个差转换为 (经过的时间+估计剩余时间 V ( s ) V(s) V(s)) 的差,两个 “经过的时间” 做差算出的是 R t + 1 R_{t+1} Rt+1,于是红线代表的就是 R t + 1 + V ( S t + 1 ) − V ( s ) R_{t+1} + V(S_{t+1})- V(s) Rt+1+V(St+1)−V(s) 这个差值了,这正是TD方法的target error,即 “状态的价值修正值”
-
-
emmmm这个例子感觉真的不怎么好,尤其这个折线图画的不直观。不过我认为理解以下几个重点即可
- MC方法必须等到episode结束后,才能反向计算 G t G_t Gt 对 v ( s ) v(s) v(s) 进行更新
- TD方法中状态每一步变化都可以立即对 v ( s ) v(s) v(s) 进行更新,且更新时的修正值与预测值在时序上的变化,即时序的差分成正比( α \alpha α),这正是TD学习名称的由来(Temporal-Difference 即 “时序差分”)。
- 所谓 “预测值在时序上的变化”,可以从TD target error的角度理解:忽略折扣系数 γ \gamma γ 和修正步长 α \alpha α,在时刻 t t t,我们估计状态 S t S_t St 的价值为 v ( S t ) v(S_t) v(St),在时刻 t + 1 t+1 t+1,我们估计状态 S t + 1 S_{t+1} St+1 的价值为 v ( S t + 1 ) v(S_{t+1}) v(St+1),也就是间接地估计状态 S t S_t St 的价值为 R t + 1 + v ( S t + 1 ) R_{t+1} + v(S_{t+1}) Rt+1+v(St+1),于是用预测的差分 R t + 1 + v ( S t + 1 ) − v ( S t ) R_{t+1} + v(S_{t+1}) - v(S_t) Rt+1+v(St+1)−v(St) 来修正 v ( S t ) v(S_t) v(St)
- TD算法中涉及到 R t + 1 R_{t+1} Rt+1 和 S t + 1 S_{t+1} St+1,在状态转移时获得奖励,这暗示着马尔可夫性,稍后我们详细分析这一点
-
这个例子啰啰嗦嗦讲的有点多,希望能给大家更多的观察角度
4.2 对比
4.2.1 基本特性
- 相比 DP,TD 方法不需要模型的 P P P 和 R R R,是一个 model-free 的方法
- 相比 MC 方法必须等待一个episode完全终止后才能更新,TD方法在episode的每个时刻都可以更新(online)。这样的好处有以下几个
- 一些场景中,episode非常长,把更新推迟到整个轨迹结束后就太慢了,此时 MC 失效,只能用 TD
- 一些场景中可能是持续的任务(continuing environments, non-terminating),难以分出 episode 的概念。这时 MC 方法就会失效,而 TD 依然有效
- TD 方法可以从不完整的 episode 中学习,MC 则不行
- 有一些 MC 方法中,必须对那些采用实验性动作的 episode 进行折扣或干脆忽略掉,这可能大大减慢学习速度,而 TD 方法不太会受到这种影响
4.2.2 偏差和方差
-
偏差(bias)对比
- 对于 MC 来说,MC target,即状态 S t S_t St 的Return G t G_t Gt 是对 S t S_t St 价值 v π ( S t ) v_{\pi}(S_t) vπ(St) 的一个无偏估计。MC方法收敛的结果是对价值的无偏估计
- 对于 TD 来说,如果有一个 oracle 告诉我们 S t + 1 S_{t+1} St+1 的真实价值 v π ( S t + 1 ) v_{\pi}(S_{t+1}) vπ(St+1),则 TD target R t + 1 + γ v π ( S t + 1 ) R_{t+1} + \gamma v_{\pi}(S_{t+1}) Rt+1+γvπ(St+1)是对 S t S_t St 价值 v π ( S t ) v_{\pi}(S_t) vπ(St) 的一个无偏估计,但事实上我们不能获得 S t + 1 S_{t+1} St+1 的真实价值,只能用当前的估计值 v ( S t + 1 ) v(S_{t+1}) v(St+1) 来代替,因此真实的TD target是对 S t S_t St 价值的有偏估计。TD方法收敛的结果是对价值的有偏估计
-
方差(variance)对比
- 对于MC来说,计算MC target(即return)时向后看了很多步,MC每一步都有随机性(return depends on many random actions, transitions, rewards)
- 对于TD来说,计算TD target时只往后看了一步(TD target depends on one random action, transition, reward),TD只引入了一步随机性
- 虽然MC和TD都会收敛,但引入随机性越多,会导致多次计算的结果间差距越大,即方差越大
-
小结
- MC方差高于TD,但没有偏差
- 更好的收敛性能(Good convergence properties, even with function approximation)
- 对设定的初值不敏感
- 易于理解和使用
- TD方法的方差低于MC,有一些偏差
- 通常比MC更高效(收敛快)
- 只要合理地选择步长 α \alpha α,TD(0) 也可以收敛到s的真实价值 V π V_{\pi} Vπ (but not always with function approximation)
- 对初始值的设定更敏感
- 在一些特定情况下,TD 的偏差可能导致算法失效
- MC方差高于TD,但没有偏差
4.2.3 收敛速度
-
MC 和 TD哪个收敛更快?这还是一个开放性问题,没有人从数学上证明了某种方法比另一种更快地收敛,事实上我们甚至还不清楚如何恰当地形式化描述这个问题,不过在实际应用上,
TD在随机任务上一般比α-MC更快收敛 -
下面看一个例子:随机游走
-
本例子出自 Richard S.Sutton 《Reinforce Learning》 第二版
-
我们在关注prediction问题时,因为不需要区分变化是环境引起的还是Agent动作引起的,所以经常会用到MRP。下面给出一个MRP,所有的事件都从中心状态C开始,然后在每一步上以相等的概率向左或向右移动一个状态。事件在极左或极右终止。当一个事件在右边终止时,会发生+1的奖励,其他奖励都是零。另外,这里衰减系数 γ = 1 \gamma = 1 γ=1,不进行折扣。现在对这个MRP进行prediction任务

易知,从A到E的价值分别是 1 6 , 2 6 , 3 6 , 4 6 , 5 6 , 6 6 \frac{1}{6},\frac{2}{6},\frac{3}{6},\frac{4}{6},\frac{5}{6},\frac{6}{6} 61,62,63,64,65,66 -
现在使用α-MC和TD(0)算法进行试验
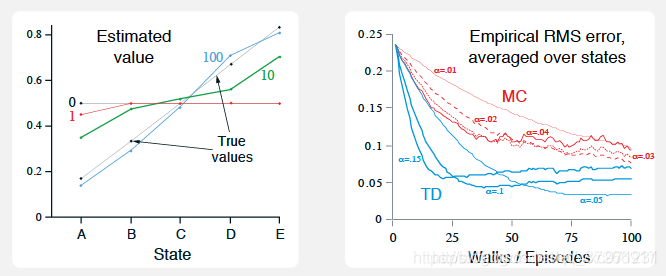
- 左图反映了TD(0)在不同数量的采样episode上学习的结果,这里步长取 α = 0.1 \alpha = 0.1 α=0.1。如图所示,所有状态的价值被初始化为0.5,第一个episode只使V(A)下降,可以推出第一幕是终止在左边的终点。因为步长比较长,最终的结果会在True values附近震荡
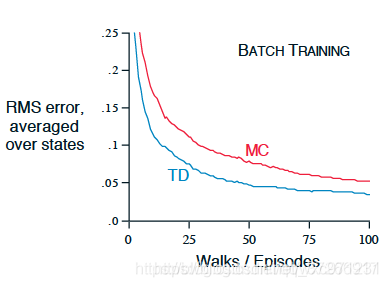
- 右图给出了不同步长 α \alpha α 下MC和TD(0)的表现,纵坐标指标是学得价值和真实价值的均方根误差(RMS),图中显示的是A到E五个状态RMS的平均值,并在100次运行下取平均的结果。这里同样把各个状态的初始价值设为0.5。
-
-
从右边的试验图可以看出
- TD比MC收敛更快
- 对于相同的方法,增大 α \alpha α 可以加速收敛,但是曲线会更粗糙;减小 α \alpha α 可以得到更光滑的曲线,但是收敛慢。
- α \alpha α 决定了最终的收敛值在真实值附近波动的范围。 α \alpha α 越小,获得的结果越精确;如果选用的 α \alpha α 太大,有可能不收敛
4.2.4 利用潜在的马尔可夫性
-
批量更新(batch training)
- 假设只有有限的episode,这时我们一般会反复地利用这些数据进行训练,直到得到的状态价值收敛为止。
- 批量更新:向模型展示一整批 episode,期间不更新 V V V,只有当整批 episode 计算完之后,才根据所有 episode 得到的增量之和更新一次。
- 使用批量更新的时候,只要步长参数 α \alpha α足够小,TD(0) 就一定可以收敛到和 α \alpha α 无关的唯一结果。α-MC 方法在同样的条件下也能确定地收敛,只是会收敛到和 TD(0) 不同的结果。下面我们通过分析二者得到结果的差异来深入理解 TD 和 MC 间的区别
-
示例:批量更新的随机游走
-
这是 4.2.3 节讨论的随机游走示例的批量更新版本。每经过一个新的episode,所有到目前为止看到的episode都被视为一个批次。TD(0) 和 α-MC 不断地使用这些批次来更新,这里把 α \alpha α 设定得足够小,保证二者都能收敛。下图绘制了两种方法求出的五个状态价值的均方根误差的均值(以整个实验的100次独立重复试验为基础)的学习曲线
可以看到 TD(0) 方法的偏差值始终比MC方法更小 -
这个结果很奇怪,根据我们 4.2.2 节的分析,MC方法的修正完全基于训练数据,它最小化了与训练集中实际return的均方根误差,可以认为MC的结果是最优估计,但是图中批量TD方法居然在均方根误差上比MC表现得更好。
-
事实上,MC只是从某些有限的方面来说最优,TD方法的优越性某种程度上与prediction这个任务更相关。 这样说还是有点不清楚,先来看下面的这个例子
-
-
示例:You are the Predictor
-
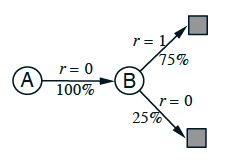
现在假设你观察到某个MRP的八个episode:
A, 0, B, 0 B, 1 B, 1 B, 1 B, 1 B, 1 B, 1 B, 0解释一下,第1个episode从状态A开始,过渡到B,奖励为0,然后从B终止,奖励为0,其他7个情节更短,从B开始就立即终止并获得奖励了。给定这批数据,你认为V(A)和V(B) 的最优估计值是多少 ?
-
每个人都应该同意 v ( B ) v(B) v(B) 的最优估计是0.75,因为这批数据在B结束了8次,其中6次return = 1,2次return = 0
-
但是对于 v ( A ) v(A) v(A) 的估计值可以有两种看法
-
观察到过程在状态A时会以100%的概率转到状态B(获得0奖励),而B的价值为0.75,因此 v ( A ) v(A) v(A) 的估计值应为0.75。这个答案本质上是先把这批 episode 建模成以下马尔可夫过程,再根据这个模型计算得出的。使用批量TD(0)会得到这个答案
-
简单地观察到 A 只出现了1次,获得的 return=0,因此认为 v ( A ) v(A) v(A) 应当估计为0。使用批量MC会得到这个答案
-
-
分析两个方法计算的 v ( A ) v(A) v(A) 估计值,不难看出 MC 的结果是在这批数据上均方误差最小的答案(实际上误差为0)。尽管如此,对于马尔可夫过程,我们仍然认为使用批量 TD(0) 得到的答案会在未来的数据上产生更小的误差
-
-
分析
-
事实上,批量MC总是找出最小化训练集上均方误差的估计,而批量 TD(0) 总是找出完全符合马尔可夫过程模型的最大似然估计参数(使得生成的episode概率最大的参数)
-
在批量更新时,马尔可夫模型的最大似然估计参数可以从多个episode中通过频率推测出来
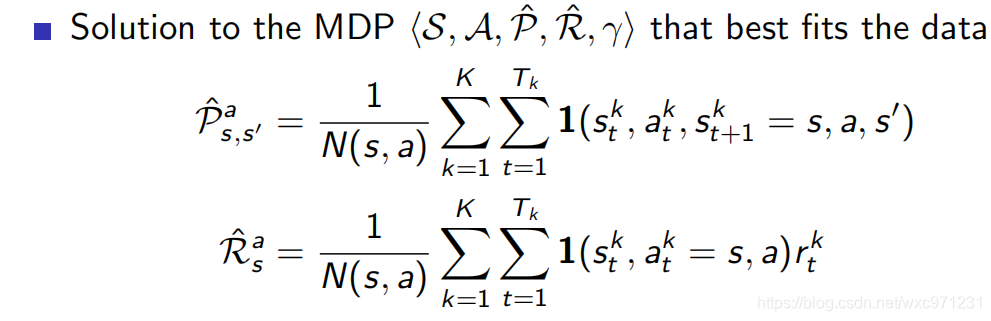
如果在某批episode中估计出的model是正确的,则这一批的估计也就完全正确,这种估计称为 “完全等价估计”,因为它等价于假设潜在过程参数的估计是确定性的而不是近似的,批量TD(0)的收敛结果就是确定性等价估计 -
这一点也有助于理解为何 TD 比 MC 收敛得更快,在以批量形式学习的时候,TD(0) 比 MC 更快收敛是因为它计算的是真正的确定性等价估计。对于非批量 TD,尽管它不能通过频率推测出模型参数,不能达到确定性等价估计或最小均方误差估计,但它仍然大致地朝着这些方向在更新,因此它也往往比 α-MC 更快。
-
最后还要说明一点,尽管确定性等价估计在某种程度上是一个最优答案,但是直接计算它的复杂度太大了。如果有n个状态,仅仅建立最大似然估计就需要 n 2 n^2 n2的内存,按照传统方法计算V的复杂度达到 o ( n 3 ) o(n^3) o(n3)。相比之下,TD方法可以用不超过n的内存,通过在训练集上反复计算逼近同样的答案,这一优势是惊人的。对于状态空间巨大的任务,TD方法可能是唯一可行的逼近确定性等价解的方法
-
-
总之,如果面对一个马尔可夫环境,由于 TD 方法的特殊的 TD target 设计,利用到相邻的状态价值 v ( S t + 1 ) v(S_{t+1}) v(St+1) 和 R t + 1 R_{t+1} Rt+1,它可以充分挖掘环境的马尔可夫性并加以利用,因此TD在马尔可夫环境中更有效(more efficient),但相应的,如果环境中马尔可夫性不成立,TD受到的性能损失比MC大
5. q(s,a) 的 prediction
5.1 评估 q(s,a) 的重要性
-
假如我们现在对 V ( s ) V(s) V(s) 进行评估并得到了最优价值函数 V ∗ ( s ) V^*(s) V∗(s),如何从中得到最优策略 π ∗ \pi^* π∗ 呢
-
上一篇文章中我们在model-based情况下讨论了这个问题,这正是Policy iteration算法的最后一步。见:强化学习笔记(3)—— MDP中的prediction和control问题:在MDP已知时,我们可以往前看一步找到 q ∗ ( s , a ) q^*(s,a) q∗(s,a),然后对它进行贪心找到使 q ∗ ( s , a ) q^*(s,a) q∗(s,a) 最大的动作,即为状态 s s s 下的最优策略。即
q ∗ ( s , a ) = R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V ∗ ( s ′ ) π ∗ ( s ) = arg max a ∈ A q ∗ ( s , a ) \begin{aligned} q^*(s,a) &= R(s,a)+\gamma \sum_{s' \in S}P(s'|s,a)V^*(s') \\ \pi^*(s) &= \argmax_{a \in A} q^*(s,a) \end{aligned} q∗(s,a)π∗(s)=R(s,a)+γs′∈S∑P(s′∣s,a)V∗(s′)=a∈Aargmaxq∗(s,a) -
然而,这里用到了 MDP 的转移矩阵P和奖励函数R,在model-free的情况下没法用这个方法
-
-
根据上述分析,在model-free的情况下,评估 q π ( s , a ) q_{\pi}(s,a) qπ(s,a) 往往比评估 V π ( s ) V_{\pi}(s) Vπ(s) 更有用一些,这样我们就可以直接收敛到 q ∗ ( s , a ) q^*(s,a) q∗(s,a),并在其上贪心得到最优策略 π ∗ ( s ) \pi^*(s) π∗(s),这在下一篇文章讨论的 model-free control 问题中非常重要
5.2 评估方法
- 无论MC还是TD,
q
(
s
,
a
)
q(s,a)
q(s,a) 的 prediction 思路都和
v
(
s
)
v(s)
v(s) 的 prediction 思路完全类似,核心的更新公式如下
M C 方 法 : q ( S t , A t ) = q ( S t , A t ) + α ( G t − q ( S t , A t ) ) T D 方 法 : q ( S t , A t ) = q ( S t , A t ) + α [ ( R t + 1 + γ q ( S t + 1 , A t + 1 ) ) − q ( S t , A t ) ] \begin{aligned} MC方法:q(S_t,A_t) &= q(S_t,A_t) +\alpha(G_t-q(S_t,A_t)) \\ TD方法:q(S_t,A_t) &= q(S_t,A_t) +\alpha[(R_{t+1} + \gamma q(S_{t+1},A_{t+1}) )-q(S_t,A_t)] \end{aligned} MC方法:q(St,At)TD方法:q(St,At)=q(St,At)+α(Gt−q(St,At))=q(St,At)+α[(Rt+1+γq(St+1,At+1))−q(St,At)] 当对每个 ( s , a ) (s,a) (s,a) 二元组的访问次数趋向无穷时,这两个方法都能二次收敛到 q ( s , a ) q(s,a) q(s,a) 的真实期望值
5.3 保持试探问题
-
q
π
(
s
,
a
)
q_{\pi}(s,a)
qπ(s,a) prediction的一个特殊之处在于:有一些
(
s
,
a
)
(s,a)
(s,a) 二元组可能永远不会被访问到。如果
π
\pi
π 是一个
确定性策略,那么遵循 π \pi π 意味着在每一个状态 s s s 中只能观测到一个动作 a a a 的回报,这个状态对应状态集中的其他动作始终不能被选取,因而无法采样求平均。这个问题非常严重,因为学习 q ( s , a ) q(s,a) q(s,a) 就是为了帮助在每个动作的所有可用动作间进行选择,进而为提升策略 π \pi π 打下基础。 - 相比而言, v π ( s ) v_{\pi}(s) vπ(s) prediction中也有一些状态 s s s 可能覆盖不到,但是这个问题就不重要,因为对 v π ( s ) v_{\pi}(s) vπ(s) 进行评估仅仅就是在进行prediction而已,那些没有被 π \pi π 覆盖的状态对于评估策略 π \pi π 没有意义。而 对 q π ( s , a ) q_{\pi}(s,a) qπ(s,a) 做 prediction 往往是为了优化 π \pi π 进行的准备工作,我们必须试探所有动作,这样才能从中找出更好的动作以优化 π \pi π。在下一篇关于model-free control的文章中,我们还会回来强调这个问题。
- 通常有两个方法可以解决此问题
试探性出发:将指定的 ( s , a ) (s,a) (s,a) 二元组作为起点开始一个episode的采样,并且保证所有 ( s , a ) (s,a) (s,a) 二元组都有非零的概率可以被选为起点。这保证了episode数量趋于无穷时,每个 ( s , a ) (s,a) (s,a) 二元组都会被访问到无数次。这个方法通常很有效,但是在从真实环境中学习时,这个假设往往难以满足- 只考虑那些在每个状态下所有动作都有非零概率被选中的随机策略,这样就从源头上避免了不可能被访问的 ( s , a ) (s,a) (s,a) 的出现
6. 总结
6.1 DP、MC、TD(0) 对比图示
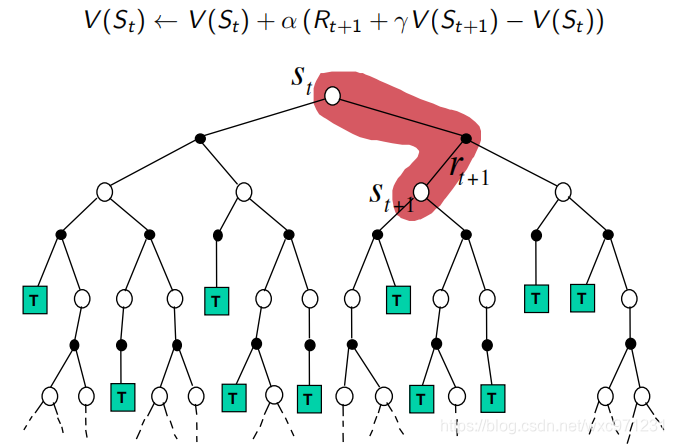
- MC:每次更新按一条episode走到底,得到
G
t
G_t
Gt 以进行修正
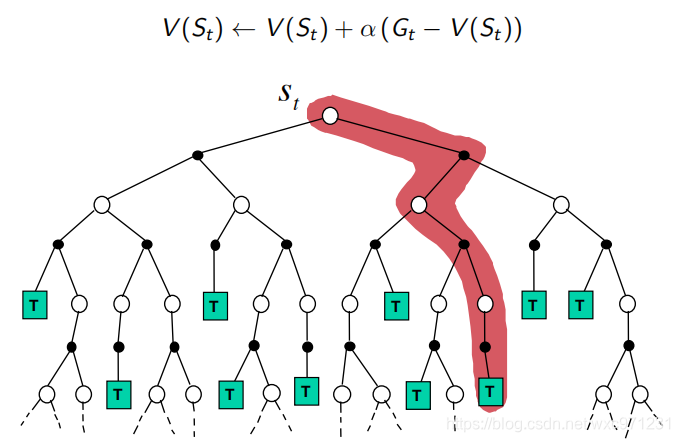
- TD:每次更新只向前走一步,得到
R
t
+
1
R_{t+1}
Rt+1和
S
t
+
1
S_{t+1}
St+1 以进行修正
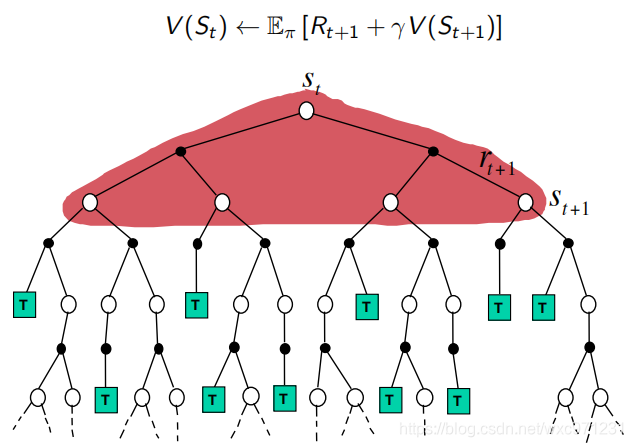
- DP:每次更新只向前走一步,按概率得到所有可能的
R
t
+
1
R_{t+1}
Rt+1和
S
t
+
1
S_{t+1}
St+1,计算期望以进行修正
6.2 Sampling & Bootstrapping
- Bootstrapping: update involves an estimate
- MC does not bootstrap
- DP bootstraps
- TD bootstraps
- Sampling: update samples an expectation
- MC samples
- DP does not sample
- TD samples
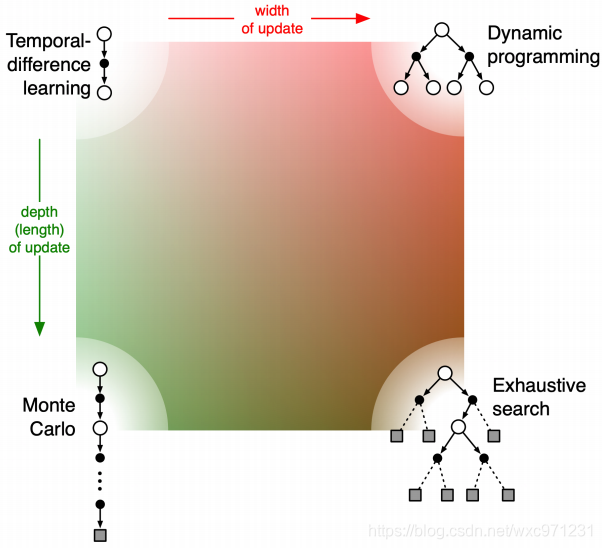
6.3 RL的统一观点
- 从TD按宽度扩展,即得DP;从TD按深度扩展,即得MC;同时按宽度和深度扩展,即得穷举搜索


















 2284
2284

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











