






原理
在朴素算法中,移动模式串后,就会丢掉之前已匹配符号的信息。所以,很可能一个文本符号会与不同的模式符号进行多次比较。这导致了最坏时间复杂度O(nm)(n:文本长度,m: 模式长度)。KMP算法利用之前的符号比较信息。该算法不会对已经与某个模式符号匹配的文本符号进行重复比较。所以KMP的时间复杂度是O(n)。
然而,需要对模式串进行预处理以分析它的结构。预处理阶段的时间复杂度是O(m)。因为m<=n,所以总的时间复杂度是O(n)。
基本定义
定义:设A是一个字母表,x =x0 ...xk-1,k∈ N 是一个由A中的字母构成的长度为k的字符串。
x的一个前缀是一个子串u:
u =x0 ...xb-1 whereb∈{0, ...,k}
x的一个后缀是一个子串u:
u =xk-b ... xk-1 whereb∈{0, ...,k}
如果u≠x,例如u的长度b小于k,则u分别叫做真前缀或真后缀。
x的边界串(border)是一个子串r:
r =x0 ...xb-1 and r =xk-b ... xk-1 where b∈{0, ...,k-1}
x的边界是一个真前缀也是一个真后缀。它的长度b称为边界宽。
实例:设x=abacab,那么x的真前缀包括:
ε(空串),a, ab, aba, abac, abaca
x的真后缀包括:
ε(空串), b, ab, cab, acab, bacab
ε长度为0,边界串ab长度为2
空串ε是所有非空字串的边界串。空串本身没有边界串。
下面的例子演示如何用边界串概念来确定移动距离。
实例:
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | ... |
|---|---|---|---|---|---|---|---|---|---|---|
| a | b | c | a | b | c | a | b | d | ||
| a | b | c | a | b | d | |||||
| a | b | c | a | b | d |
在0...4位置的符号已经匹配了,在位置5对c和d进行比较,发现不匹配。模式串可以被移动3个位置,然后继续在
位置5进行比较。
移动距离由模式串p的匹配前缀的最宽边界串决定。在这个例子中,匹配前缀是abcab,它的长度j=5,
它的最宽的边界串是ab,其宽度b等于2,移动距离等于j-b=5-2=3.
模式串的每个前缀的最宽边界串会在预处理阶段确定下来。这样,在随后的搜索阶段,移动距离就可以通过已经匹配的前缀计算出来。
预处理
定理:假设r, s 是x的边界串,并且|r| < |s|。那么r是s的边界串。
证明:如下图所示,r和s是字串x的边界串。因为r是x的前缀,所以它也是s的真前缀,因为它比s短。
因为r是x的后缀,所有r也是s的真后缀。因此r是s的边界串。
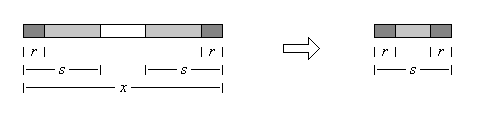
如果s是x的最宽的边界串,那么次宽的边界串r就是s的最宽的边界串。
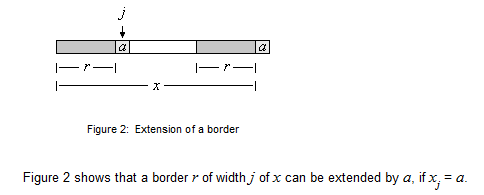
定义:设x是一个字串,a是A中的一个符号。如果ra是xa的一个边界串,x的边界串r就能够通过a进行扩展。
在预处理阶段会计算一个长度为m+1的数组,每一个元素b[i]包含模式串的长度为i的前缀的最宽边界串的
长度(i=0, ..., m)。因为长度为0的前缀ε没有边界串,我们设置b[0]=-1.
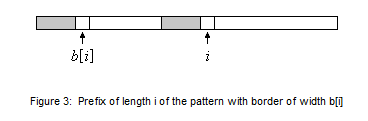
假如b[0], ..., b[i]的值已经知道了,那么b[i+1]的值可以通过检查前缀p0 ...pi-1的边界串是否可以被符号pi 扩展来计算。
如果pb[i] =pi就表示可以扩展(图3)。被检查的边界串可以通过递减顺序使用值b[i], b[b[i]]等获得。
预处理算法由一个变量j构成,j记录着这些值(上述的b[i], b[b[i]])。如果pj =pi,则宽度为j的边界串就可以被pi扩展。
否则,通过设置j = b[j]. 来检查次宽的边界串。如果没有边界串可以被扩展(j=-1)则循环终止。
通过语句j++递增j后,j就是p0 ... pi的最宽边界串的宽度,这个值被写入b[i+1]中
//Preprocessing algorithm
void kmpPreprocess()
{
int i=0, j=-1;
b[i]=j;
while (i<m)
{
while (j>=0 && p[i]!=p[j]) j=b[j];
i++; j++;
b[i]=j;
}
}
实例:对于模式 p = ababaa 数组b中的边界串的宽度有如下值。例如b[5]=3,因为前缀ababa有一个宽度为3的边界串。
| j: | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
| p[j]: | a | b | a | b | a | a | |
| b[j]: | -1 | 0 | 0 | 1 | 2 | 3 | 1 |
搜索算法
从概念上讲,如上预处理算法可以被应用于字串pt而不仅仅是p。如果只计算最大宽度为m的边界串,
那么pt的某个前缀x的宽度为m的边界串相应的就对应与t中的一个模式匹配(假设边界串没有叠加)(Figure 4)。

这解释了,预处理算法和如下搜索算法的相似性。
//Searching algorithm
void kmpSearch()
{
int i=0, j=0;
while (i<n)
{
while (j>=0 && t[i]!=p[j]) j=b[j];
i++; j++;
if (j==m)
{
report(i-j);
j=b[j];
}
}
}
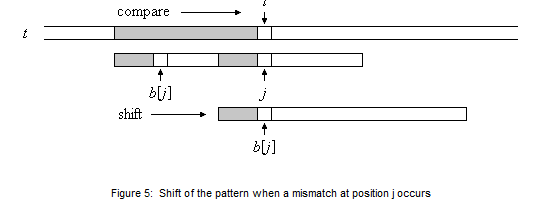
在位置b[j]继续比较,根据边界串的宽度,移动模式串。如果又发生了一个不匹配,那么就接着考虑次宽的边界串,
以此类推,直到没有边界串(j=-1)或者下一个符号匹配了。内部循环终止后,我们就有了一个新的模式串的当前
匹配前缀,接着继续执行外部循环。
如果模式串的m个符号都已经匹配了对应的文本窗口(j=m),函数report就会被调用以报告匹配位置i-j。
随后,模式串被移动最宽边界串允许的最大距离。
下面的例子展示了搜索算法执行的比较,绿色表示匹配,红色表示不匹配。
实例:
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | ... | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| a | b | a | b | b | a | b | a | a | ||||
| a | b | a | b | a | c | |||||||
| a | b | a | b | a | c | |||||||
| a | b | a | b | a | c | |||||||
| a | b | a | b | a | c | |||||||
| a | b | a | b | a | c |
分析
在预处理算法的内部循环中,j的递减值至少是1,因为b[j]<j。当j=-1时,循环终止,因此循环中所递减的j的值最多不超过
由语句j++增加的值。因为j++在外循环中执行了m次,所以内循环的总的执行次数不会超过m次。因此预处理算法的时机复杂
度为O(m)。
类似的分析可知搜索算法的时间复杂度为O(n)。上面的例子说明:比较形成了一个阶梯形状(红色和绿色符号)。整个
楼梯的高度顶多和宽一样,所以最多执行2n次比较。
因为m<=n,所以KMP总的复杂度是O(n)。
其中一种实现
void kmpPreprocess(const char *p, int *b)
{
int i=0, j=-1;
b[i] = j;
int m=strlen(p);
while(i<m)
{
while(j>-1 && p[j] != p[i]) j=b[j];
i++; j++;
b[i] = j;
}
}
/**
*@return 匹配则返回匹配位置,否则返回-1
*/
int kmpSearch(const char *t, const char *p)
{
int m=strlen(p);
int *b = new int[m+1];
kmpPreprocess(p, b);
int n=strlen(t);
int i=0, j=0;
while(i<n)
{
if (t[i] == p[j] || j==-1) { i++; j++;}
else
j = b[j];
if (j==m)
{
delete [] b;
return i-j;
}
}
delete [] b;
return -1;
}另一种实现
//Searching algorithm
int kmpSearch2(const char *t, const char *p)
{
int m=strlen(p), n=strlen(t);
int *b = new int[m+1];
kmpPreprocess(p, b);
int i=0, j=0;
while (i<n)
{
while (j>=0 && t[i]!=p[j]) j=b[j];
i++; j++;
if (j==m)
{
return (i-j);
j=b[j];
}
}
return -1;
}
原文:http://www.iti.fh-flensburg.de/lang/algorithmen/pattern/kmpen.htm















 3243
3243

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









