






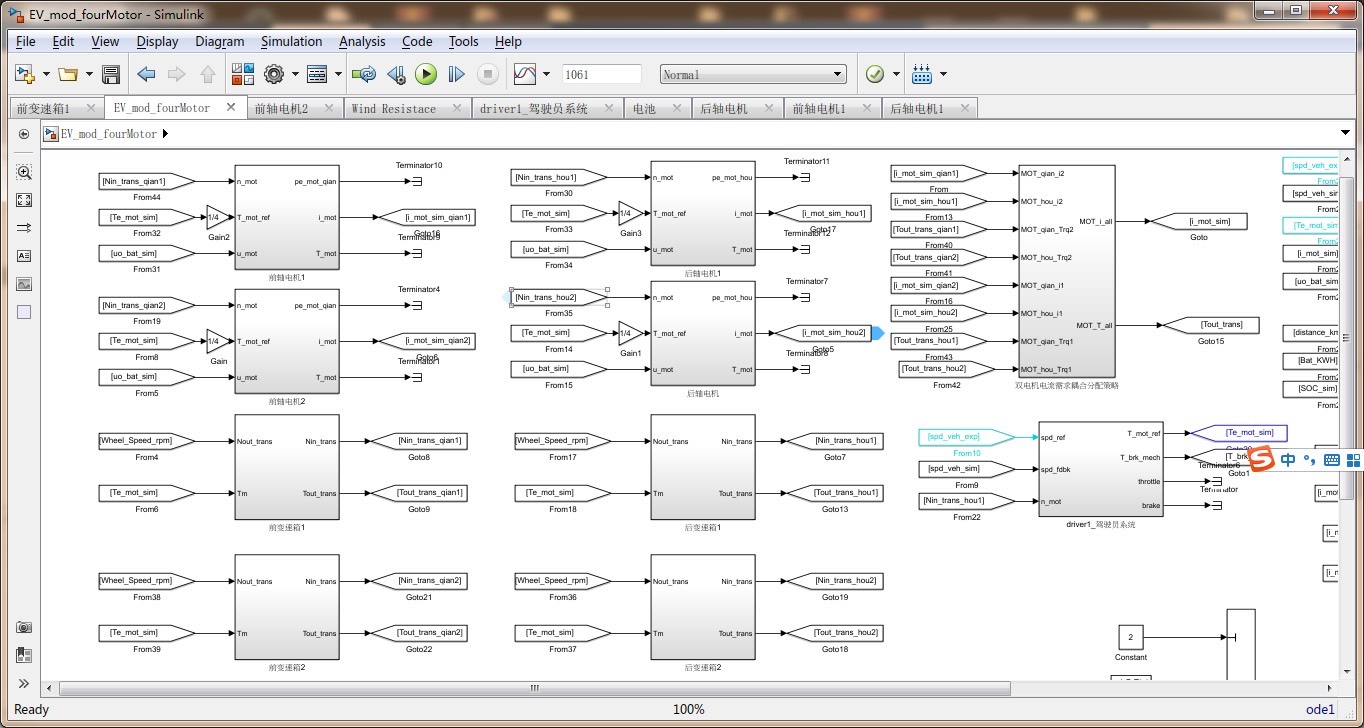
基于matlab/simulink分布式四轮驱动整车控制仿真模型,其中包括轮毂电机扭矩分配控制策略模型、驾驶员模型、轮毂电机模型、动力电池模型、变速箱模型、整车动力学模型等
——[1]可进行动力性经济性仿真,纯手工搭建,含金量较高
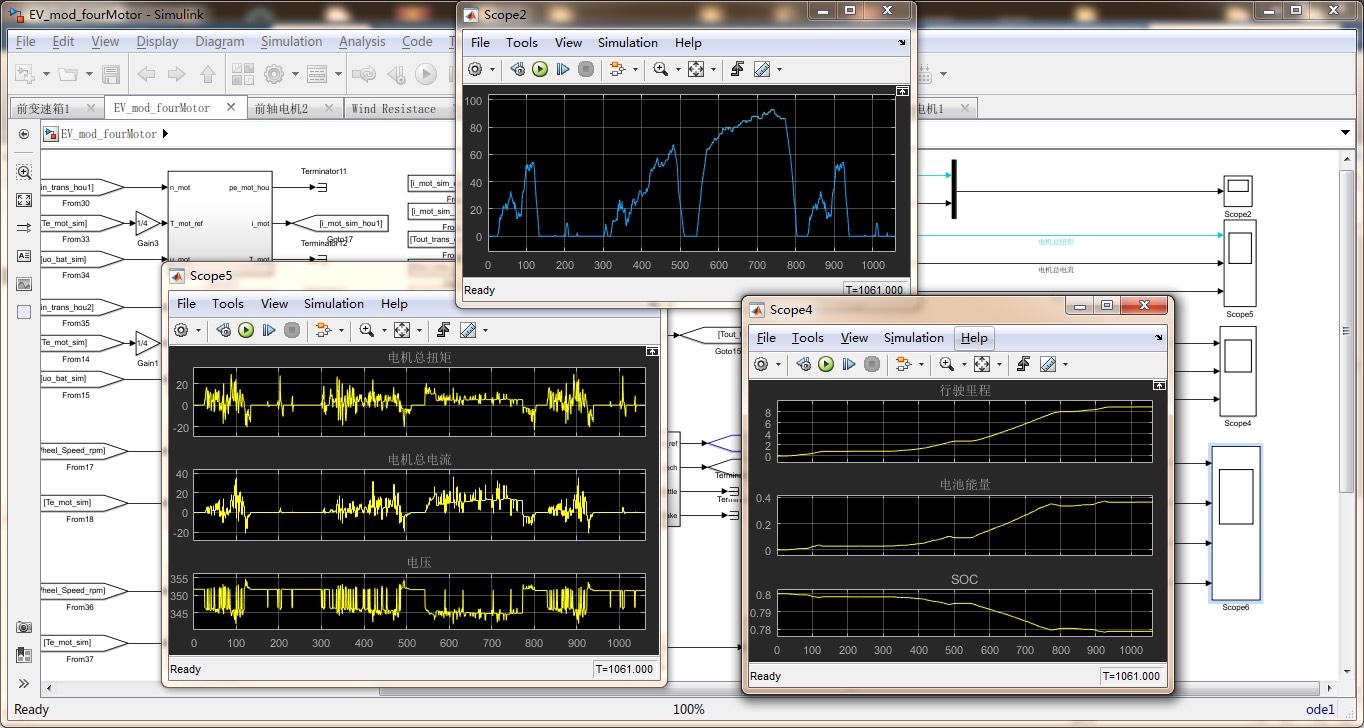
——[2]提供仿真参数,可直接运行仿真出结果
——[3]可任意改变策略,扭矩分配系数,或加扭矩分配优化算法,可直接出论文
ID:85199817590662438
汽车电控喵
基于扰动观测器的伺服系统摩擦补偿Matlab仿真研究
一、引言
随着现代工业技术的不断发展,伺服系统的性能要求越来越高。由于摩擦力的存在,伺服系统的响应速度和精度会受到一定的影响。为了解决这个问题,摩擦补偿技术得到了广泛的应用。本文将介绍一种基于扰动观测器的伺服系统摩擦补偿方法,并通过Matlab进行仿真分析。
二、模型简介
本仿真模型是基于扰动观测器的摩擦补偿仿真,仿真的基础是永磁同步电机的速度、电流双闭环控制结构。这个双闭环控制结构都采用了PI控制,且PI参数已经调优。
仿真中主要包括以下几个部分:抗饱和PI控制器、摩擦力模型、扰动观测器、坐标变换、SVPWM(空间矢量脉宽调制)、逆变器以及永磁同步电机模块。其中,抗饱和PI控制器、摩擦力模型、扰动观测器以及坐标变换等模块都是通过Matlab function编程实现的,这与C语言编程较为相似,方便进行实物移植。整个模型采用离散化仿真,使得仿真结果更接近实际数字控制系统。
三、算法简介
在伺服系统中,由于摩擦力的存在,会对系统的响应产生负面影响。因此,进行摩擦补偿是必要的。本仿真通过引入LuGre摩擦力模型来实现摩擦补偿。LuGre模型是一种经典的摩擦力模型,能够很好地描述摩擦力的非线性特性。
在此基础上,结合扰动观测器进行摩擦补偿。扰动观测器是一种用于估计系统扰动的算法,通过观测系统的实际输出与理论输出之间的差异,来估计系统的扰动。在伺服系统中,摩擦力就是一种主要的扰动。通过扰动观测器估计出的摩擦力,可以对其进行补偿,从而提高伺服系统的性能。
四、仿真分析
在Matlab环境下,我们搭建了基于扰动观测器的伺服系统摩擦补偿仿真模型。通过调整仿真参数,模拟不同的工作场景,对系统的响应进行了仿真分析。
仿真结果表明,通过引入LuGre摩擦力模型和扰动观测器,可以有效地进行摩擦补偿,提高伺服系统的响应速度和精度。同时,通过对比仿真结果和实际控制系统的效果,验证了本仿真模型的实用性。
五、结论
本文介绍了基于扰动观测器的伺服系统摩擦补偿方法,并通过Matlab进行了仿真分析。仿真结果表明,该方法可以有效地提高伺服系统的性能。本仿真模型采用模块化设计,方便进行功能扩展和调试。同时,通过离散化仿真,使得仿真结果更接近实际数字控制系统。
六、未来工作
未来的工作中,我们将进一步研究不同类型的摩擦力模型以及扰动观测器的优化方法,以提高摩擦补偿的精度和响应速度。同时,我们也将研究如何将本仿真模型应用于实际的伺服系统中,为工业应用提供技术支持。
七、致谢
感谢实验室的老师和同学们在仿真过程中的帮助和支持,感谢参考文献的作者们为我们提供了宝贵的资料。希望通过本文的介绍,能够引起更多人对伺服系统摩擦补偿技术的关注和研究。
相关的代码,程序地址如下:http://matup.cn/817590662438.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









