







 本文详细描述了如何从建立空工作站开始,通过选择并配置机器人、吸盘、传送带等元件,设置传感器和目标点,编写并应用PLC程序,最终实现自动化工作流程的搭建过程。
本文详细描述了如何从建立空工作站开始,通过选择并配置机器人、吸盘、传送带等元件,设置传感器和目标点,编写并应用PLC程序,最终实现自动化工作流程的搭建过程。
(1)建立空工作站
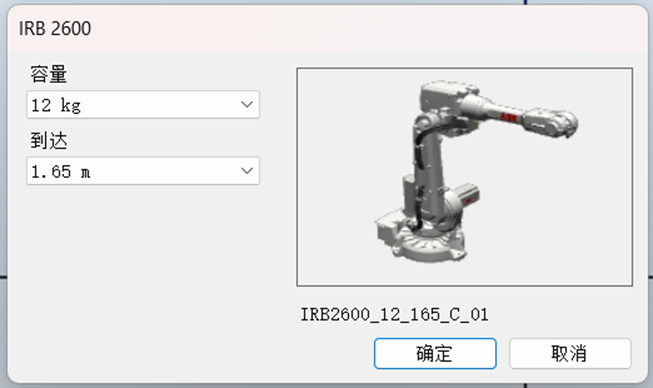
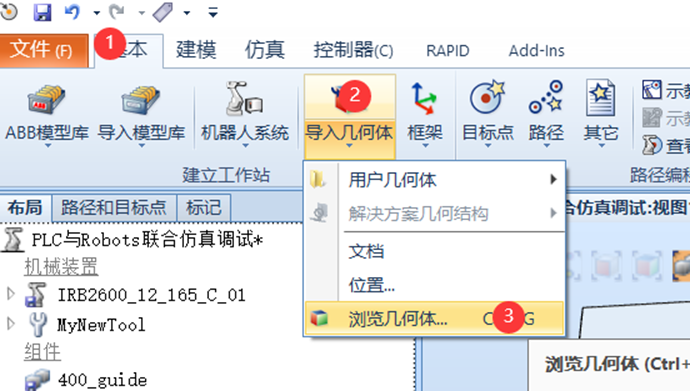
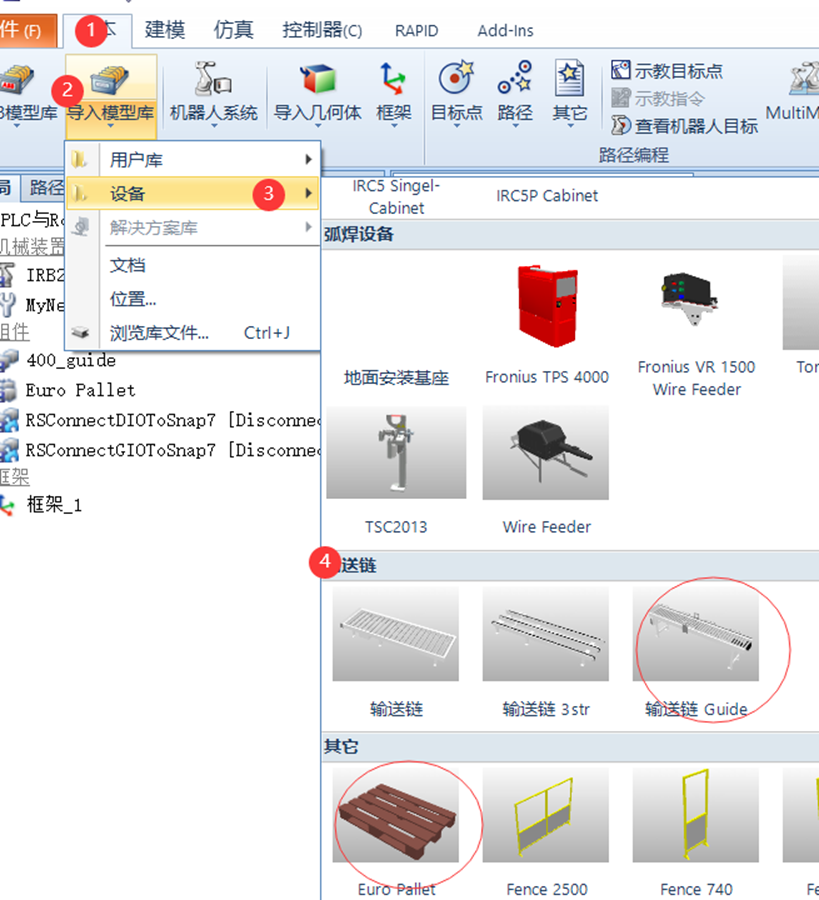
(2)选择机器人、导入吸盘、托盘、传送带
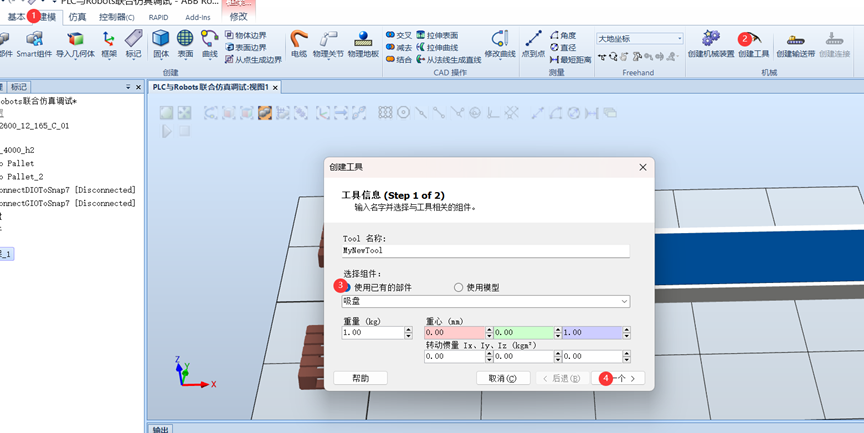
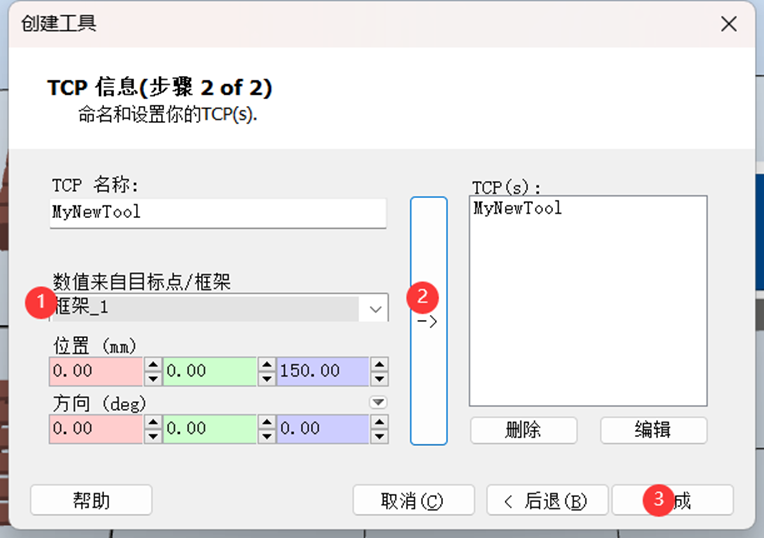
(3) 将导入的吸盘变为工具
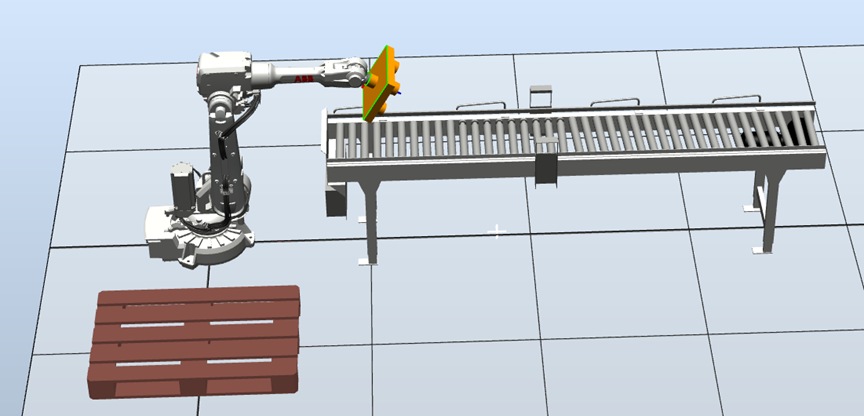
(4)创建机器人系统
布局如下
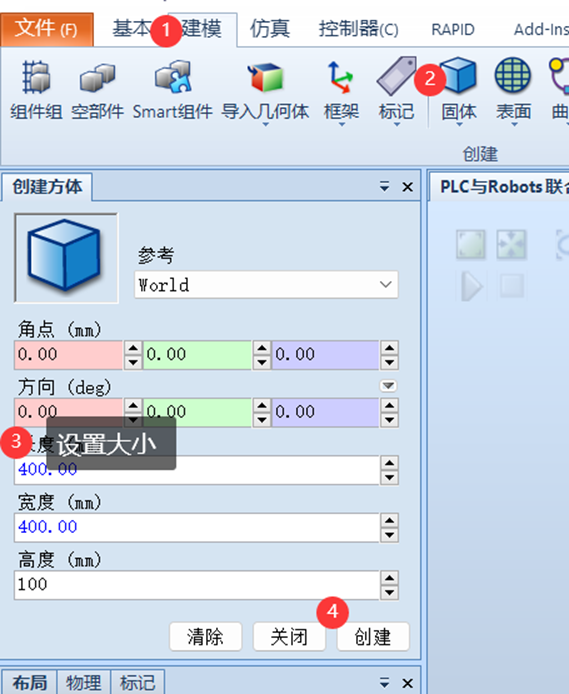
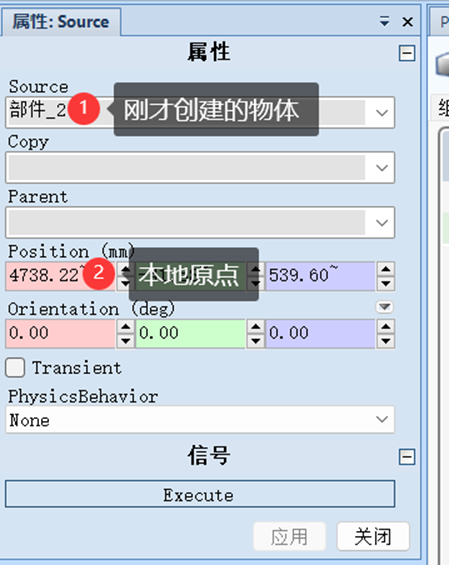
(5)创建物体
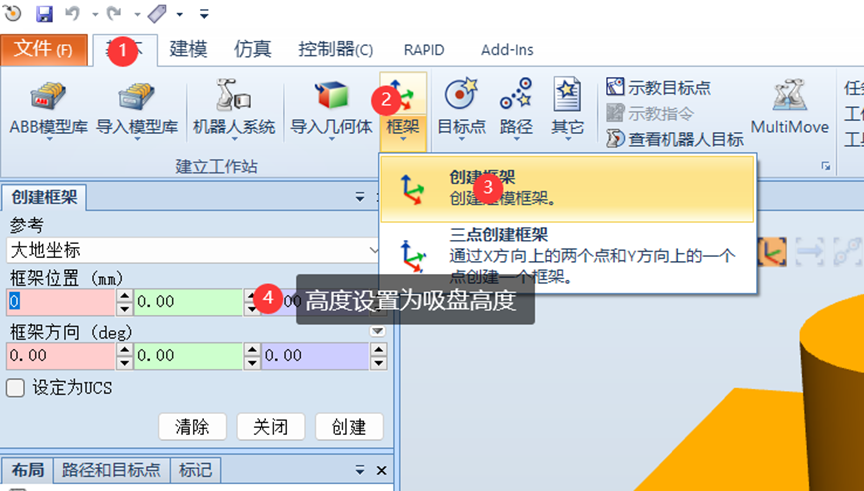
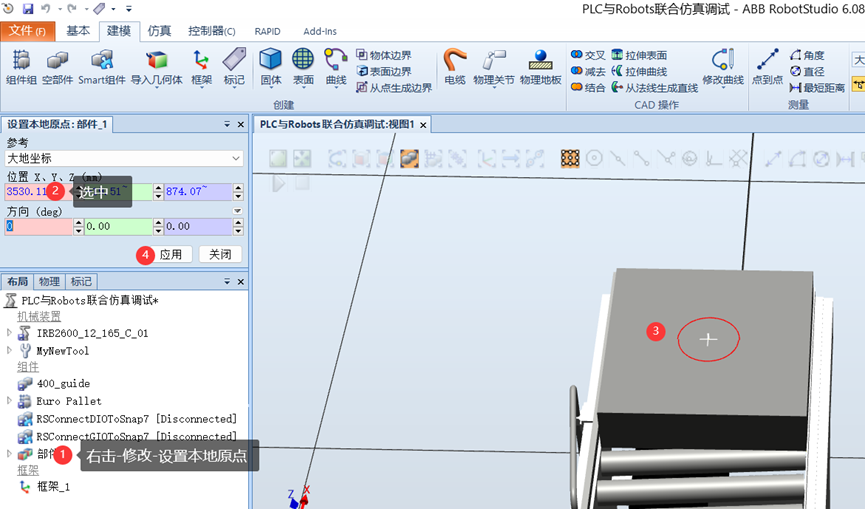
(6)设置物体本地原点
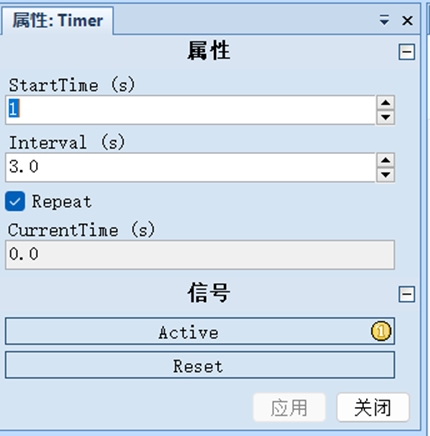
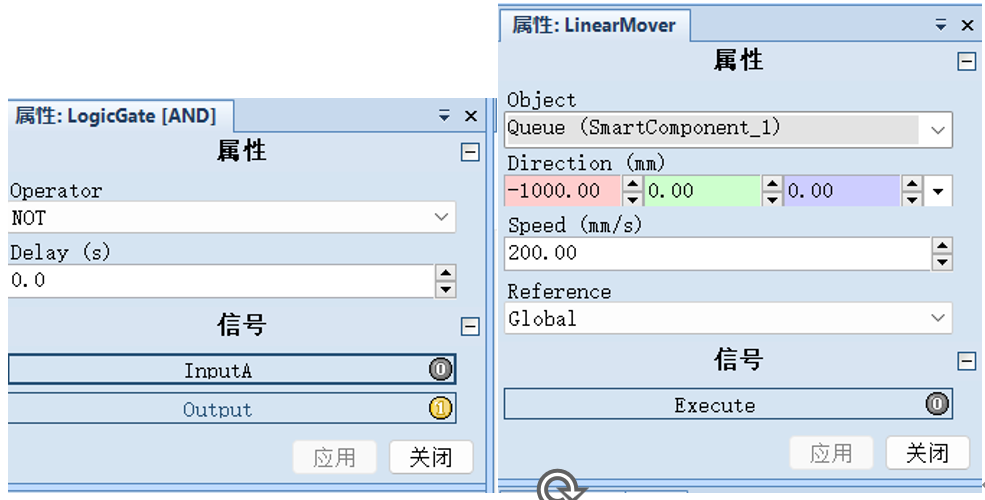
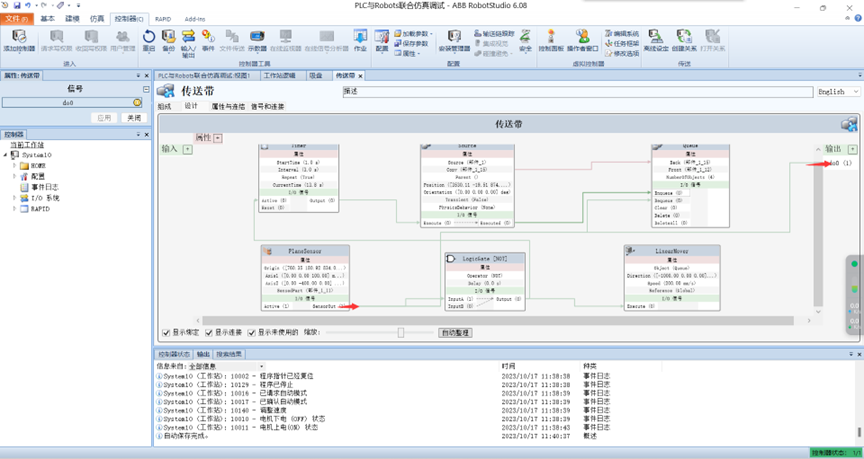
(7)创建传送带Smart组件
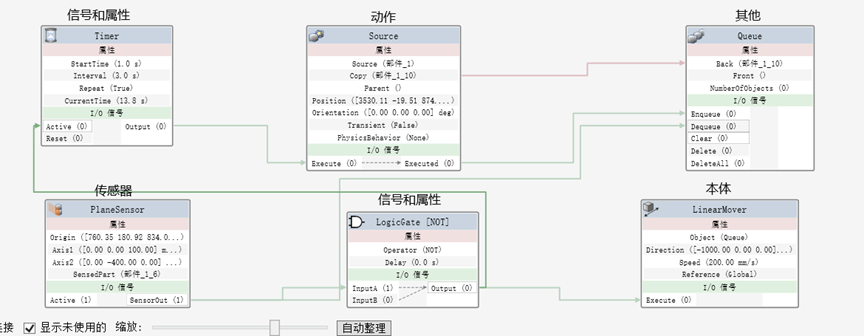
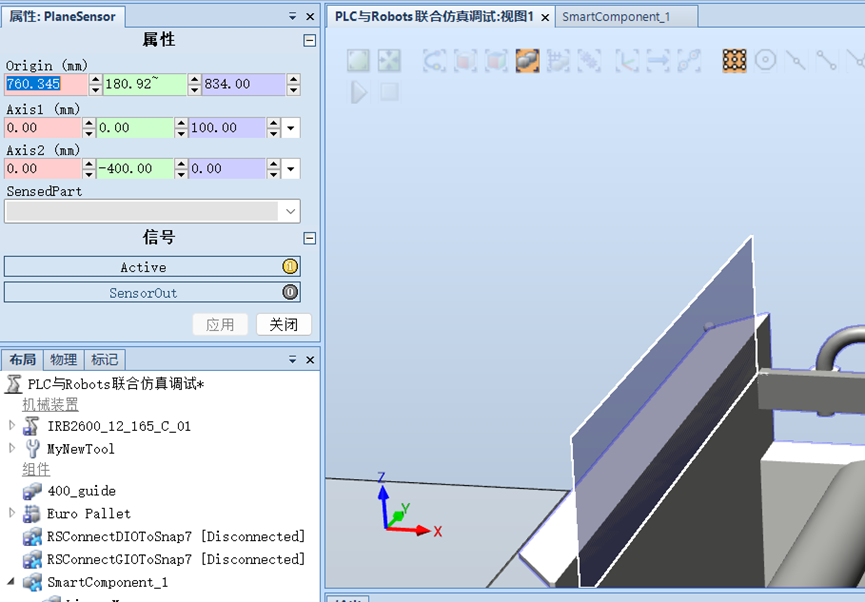
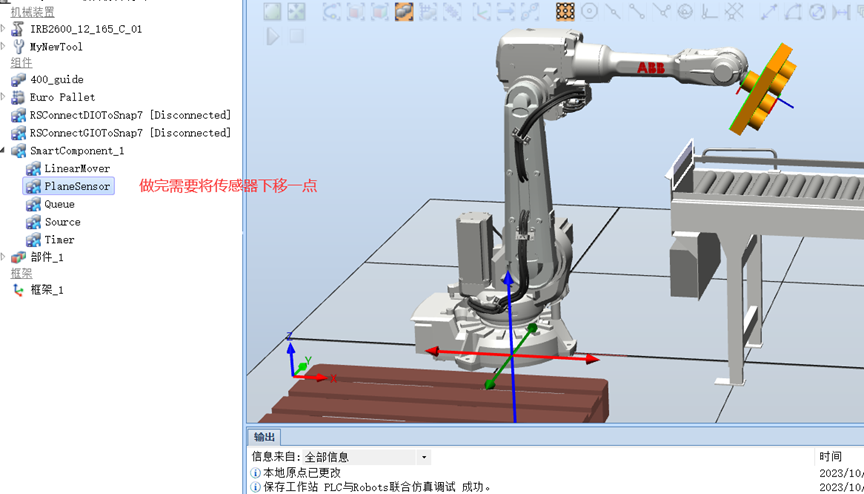
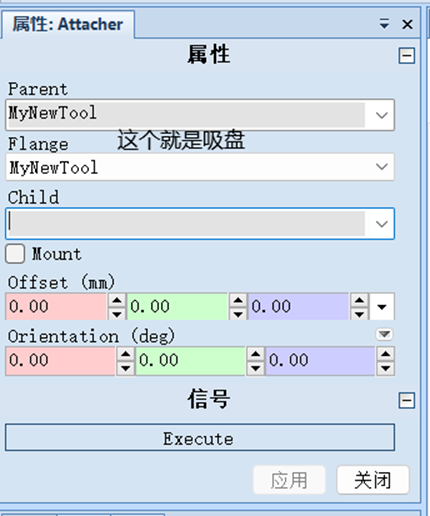
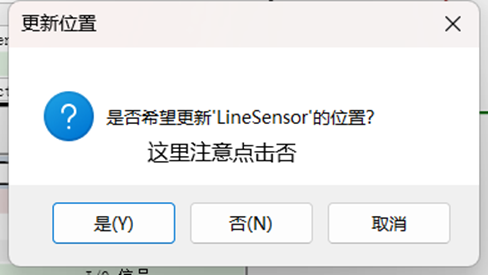
(8)创建吸盘Smart组件
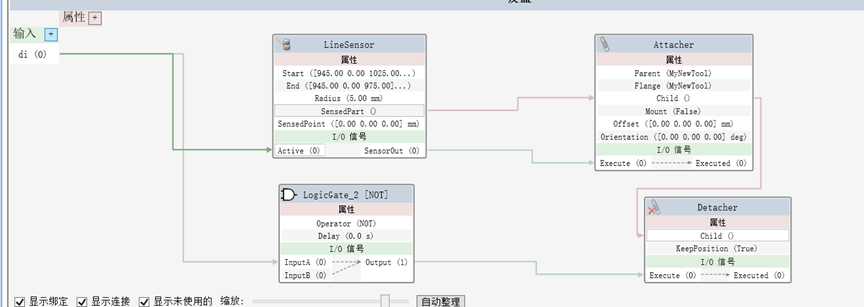
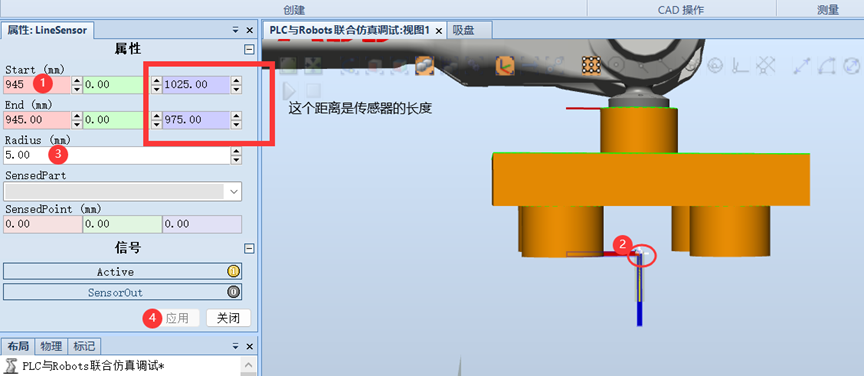
将吸盘的传感器拖到吸盘上
(9)示教目标点
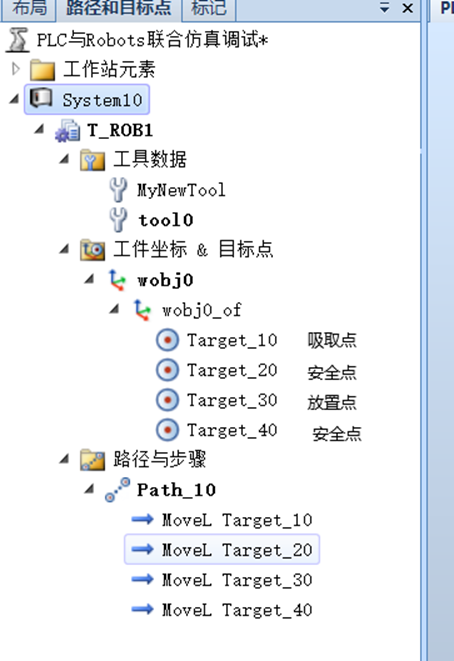
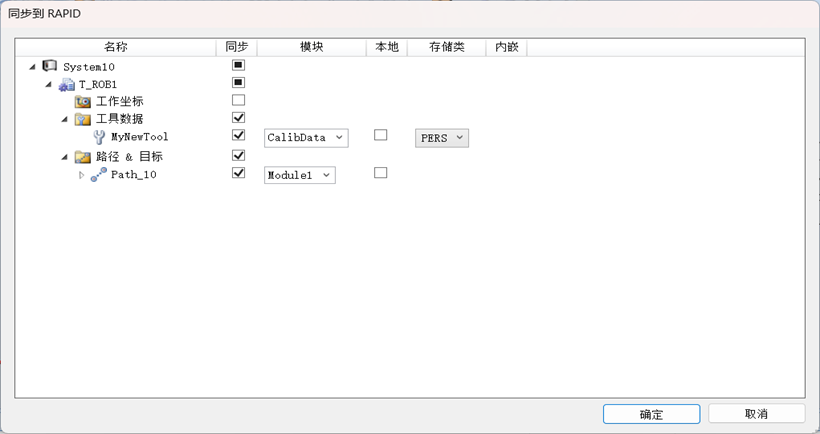
(10)同步示教点
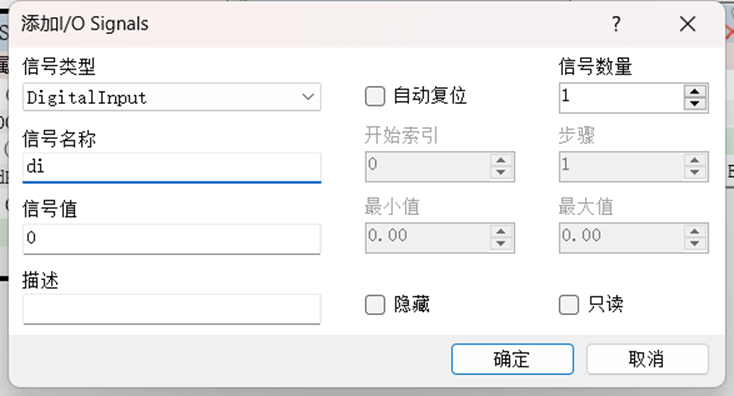
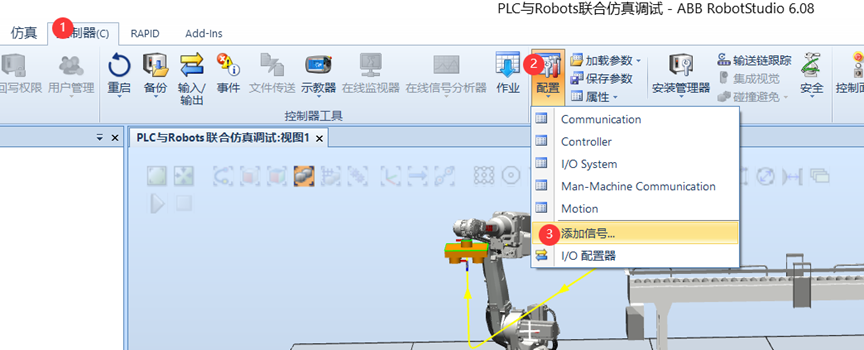
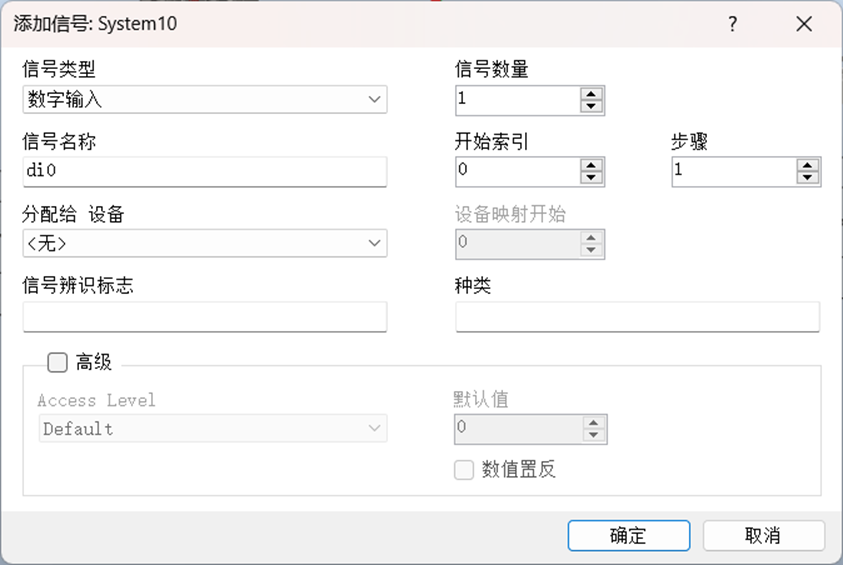
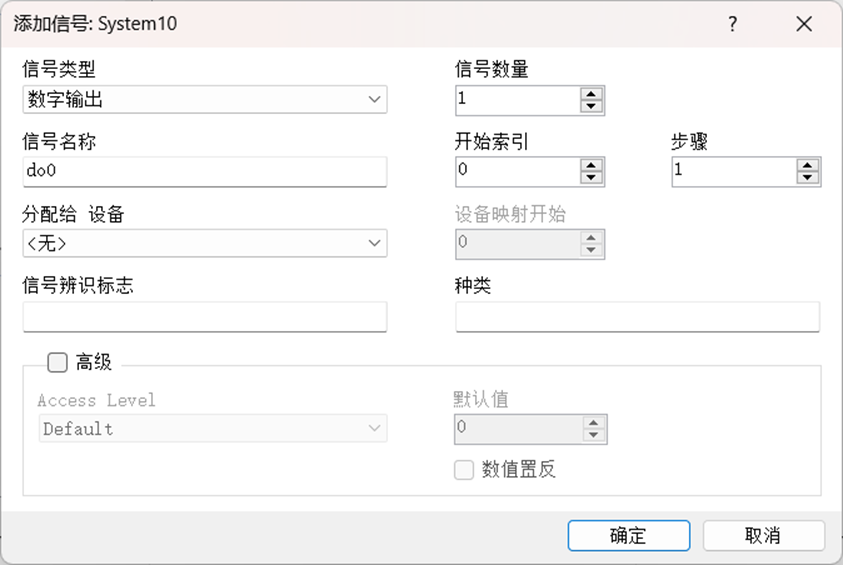
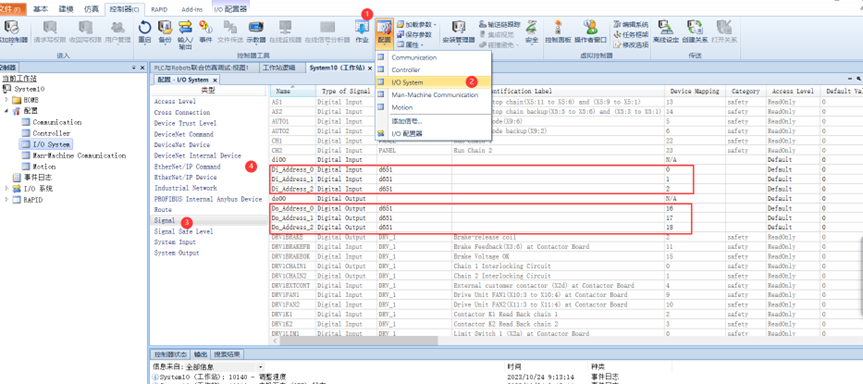
(11)添加信号
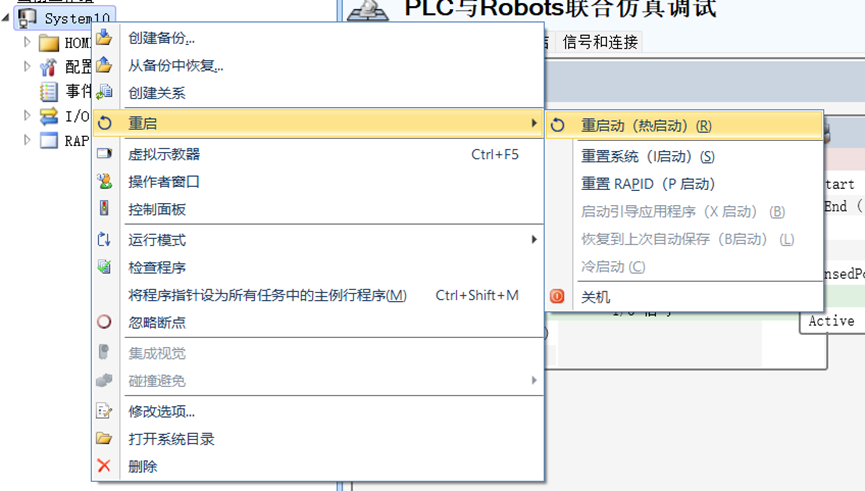
创建完成后重启工作站
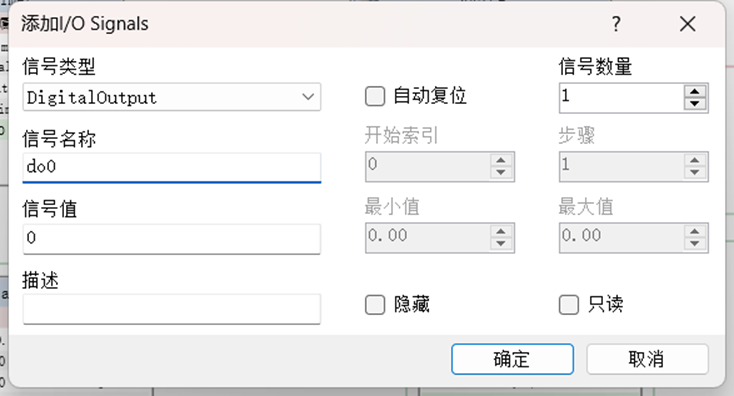
为传送带的Smart组件添加一个do0输出,并将传感器与do连接
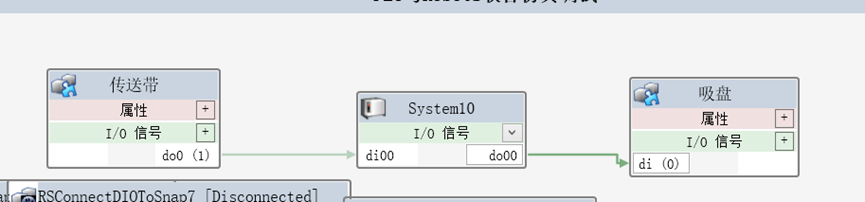
(12)将工作站和Smart连接
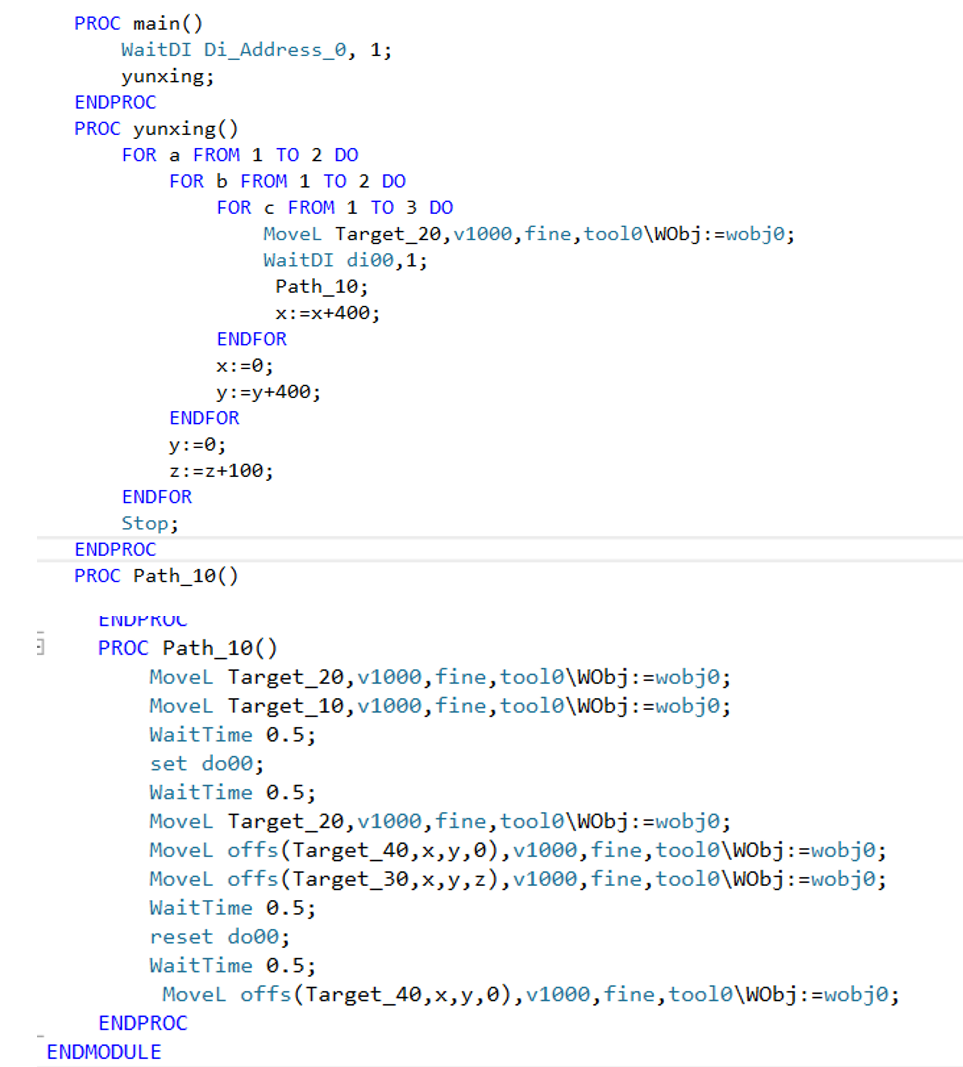
(13)编写程序
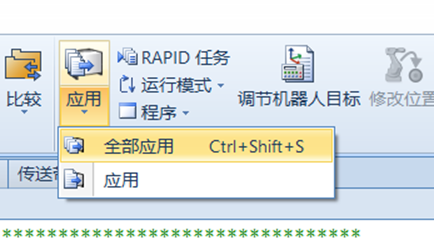
(14)将程序应用到工作站
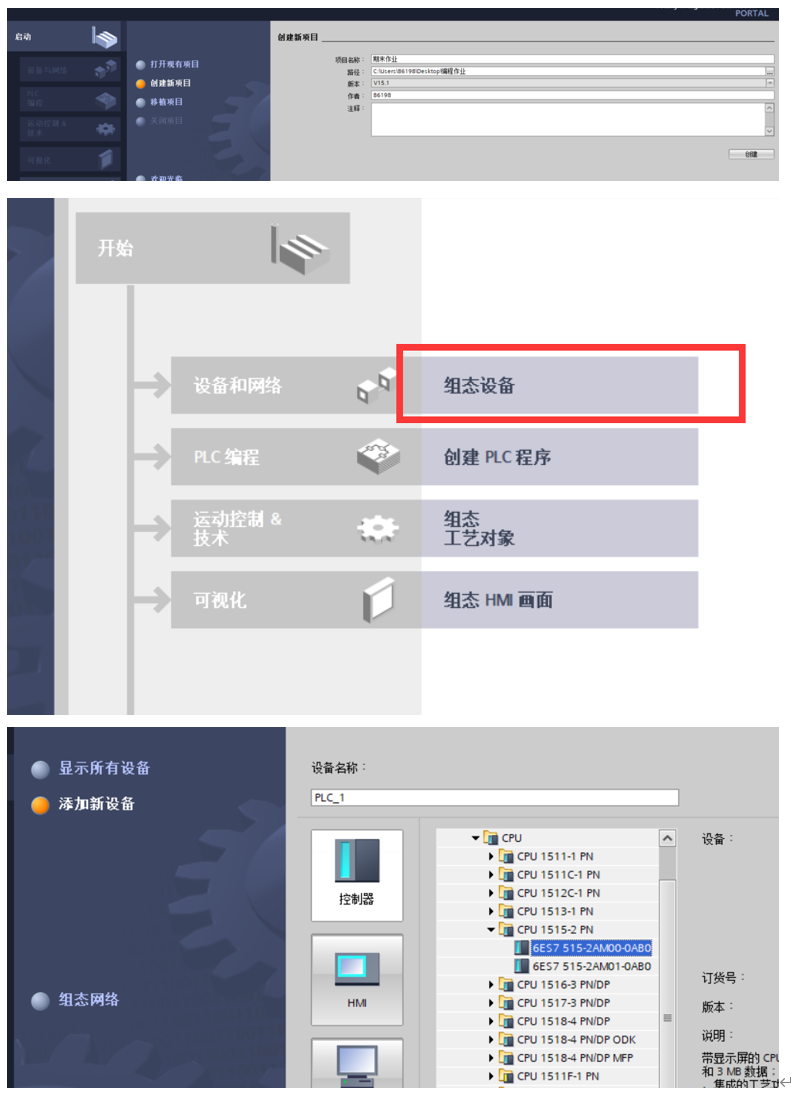
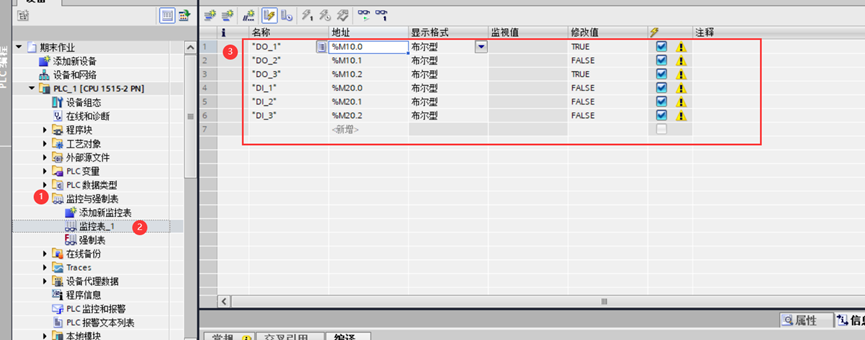
(15)创建博图
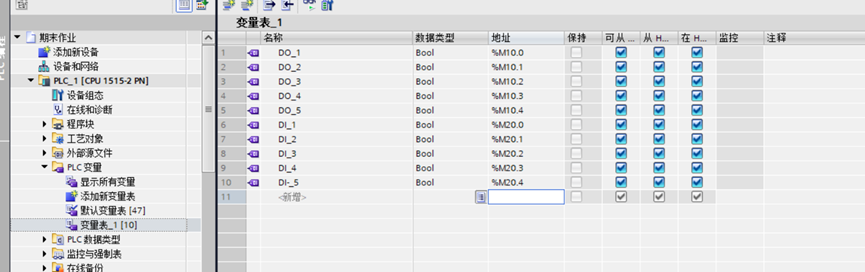
(16)添加变量
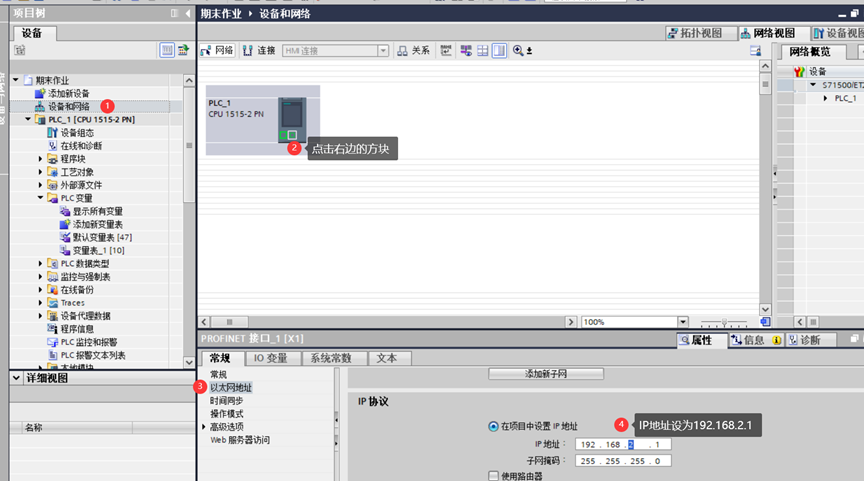
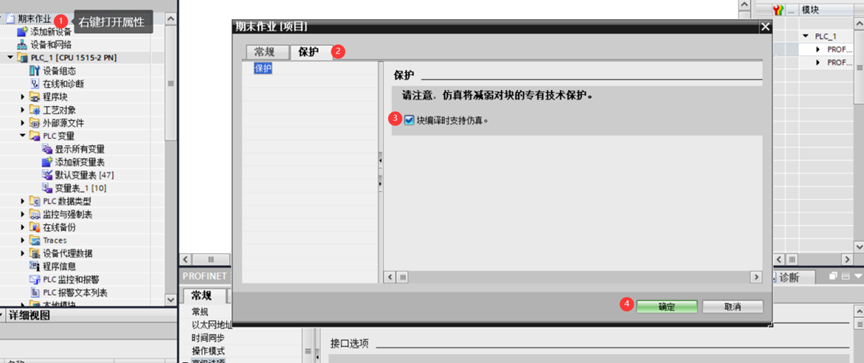
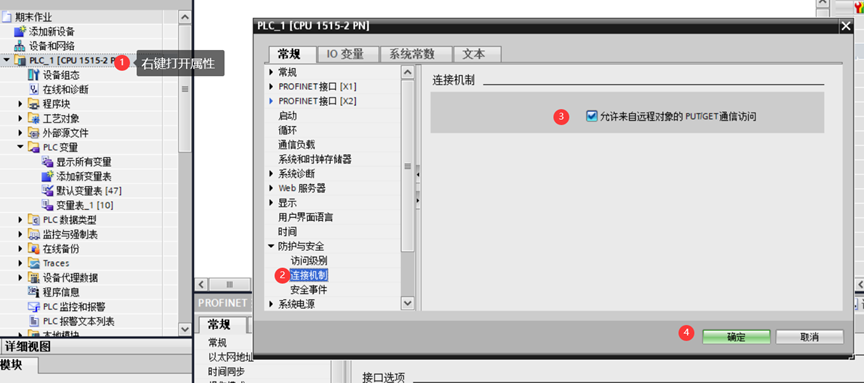
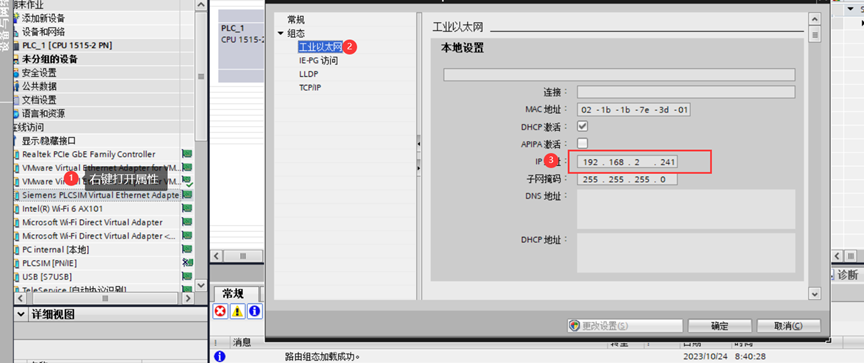
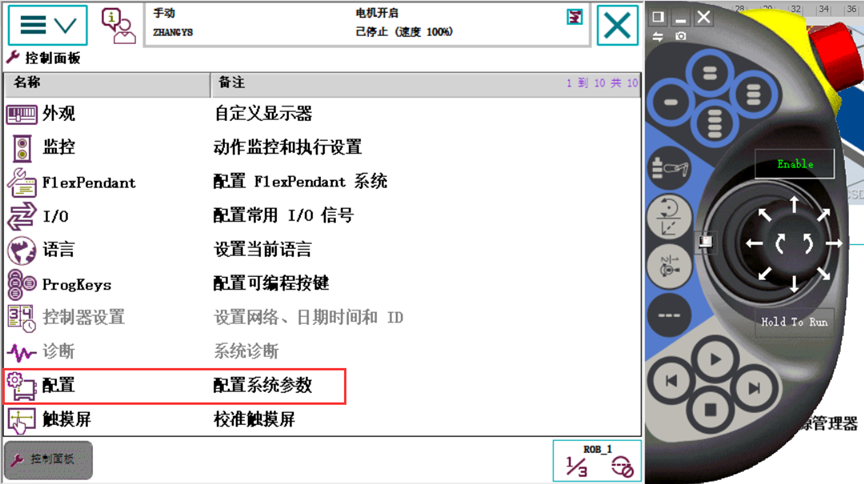
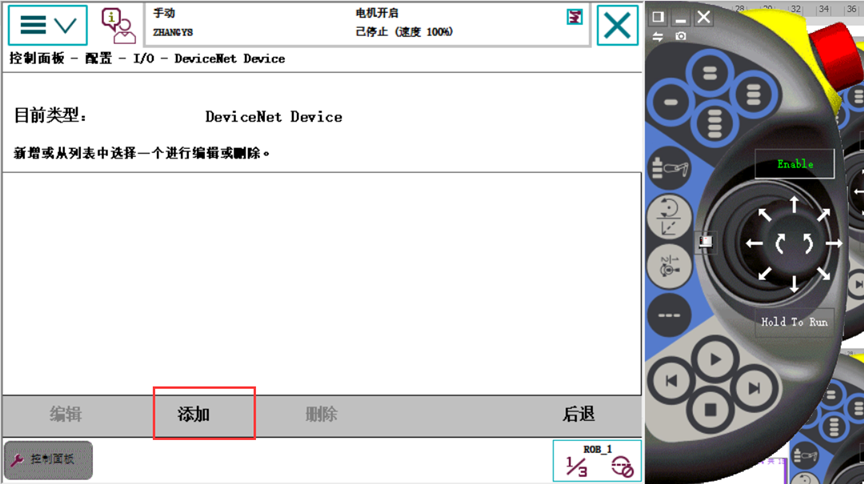
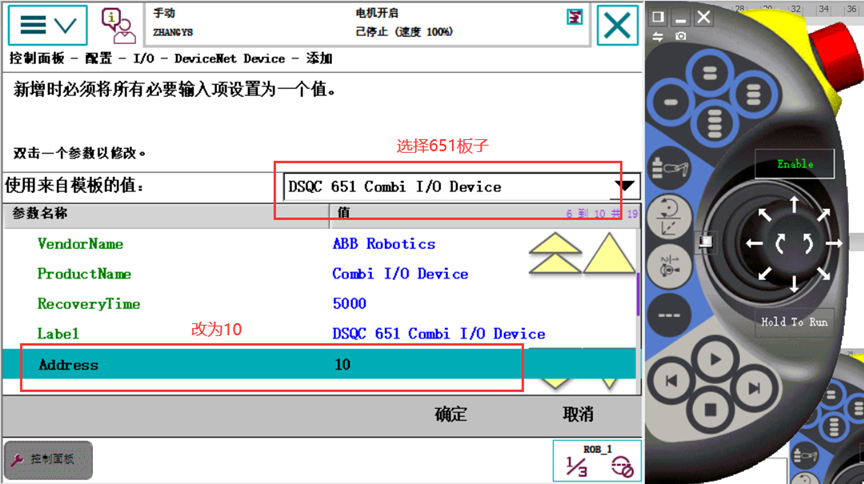
(17)设置通讯参数
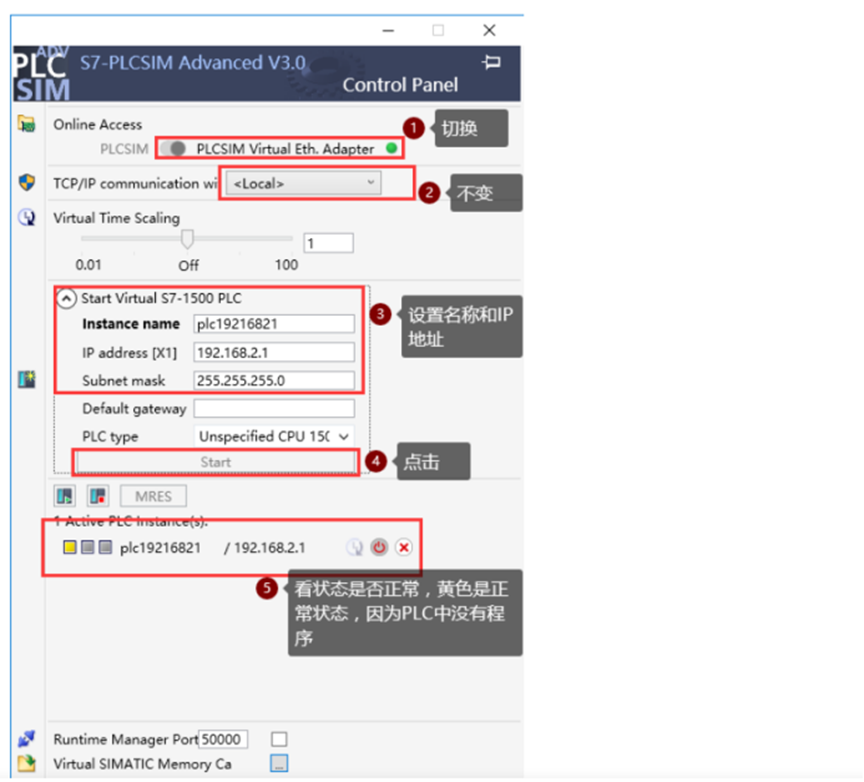
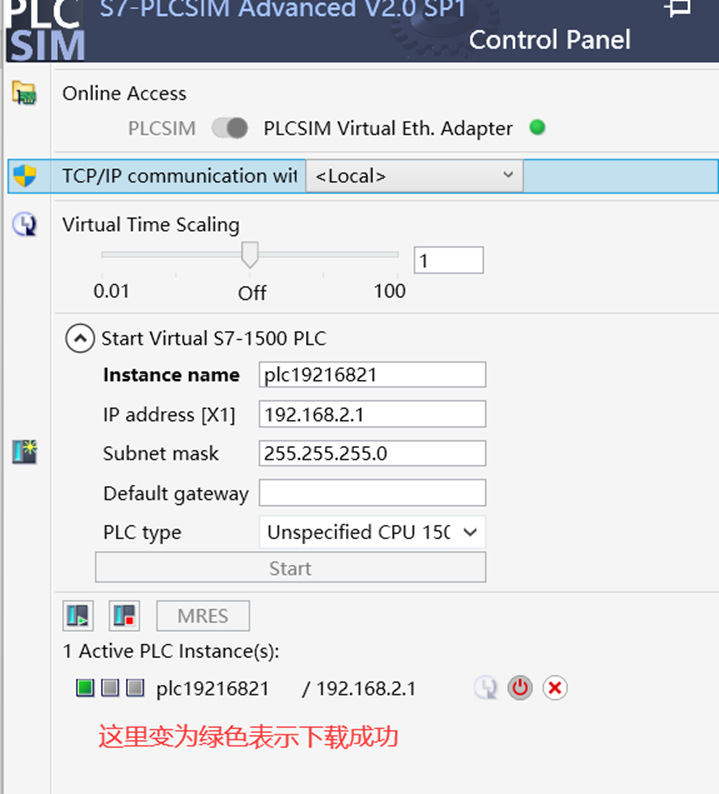
(18)启动PLCSIM Advance并进行设置
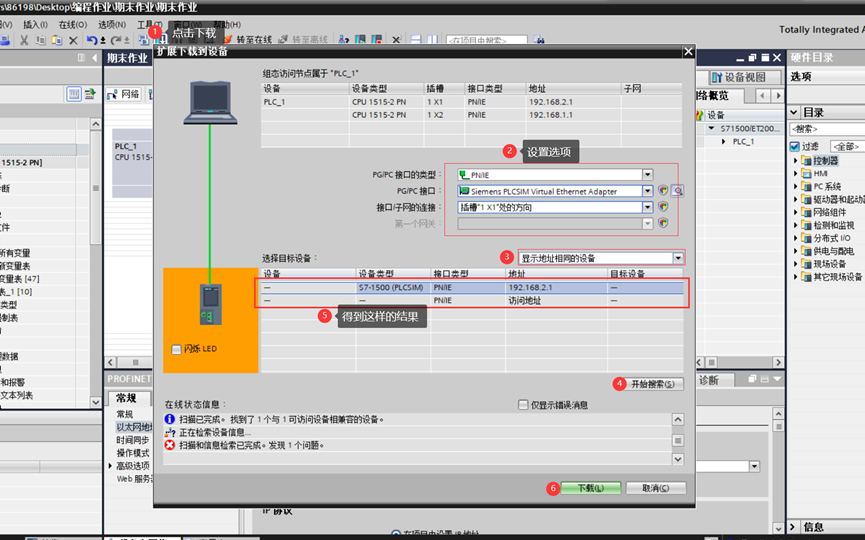
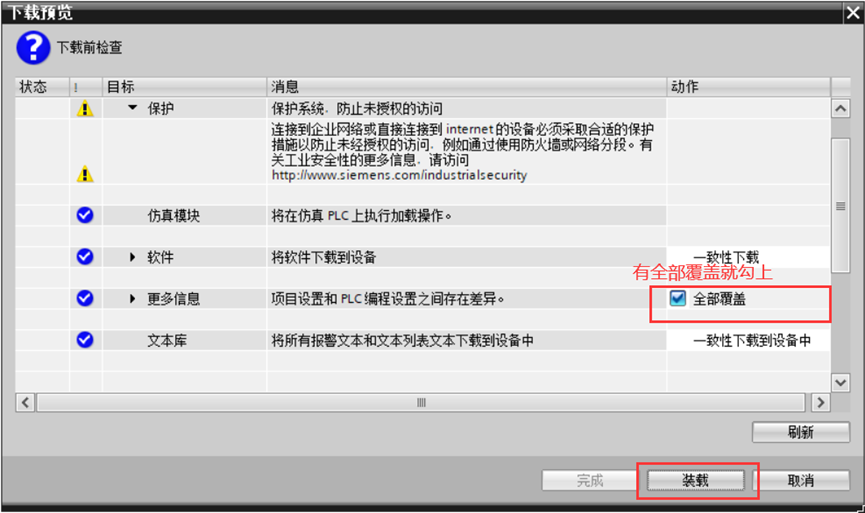
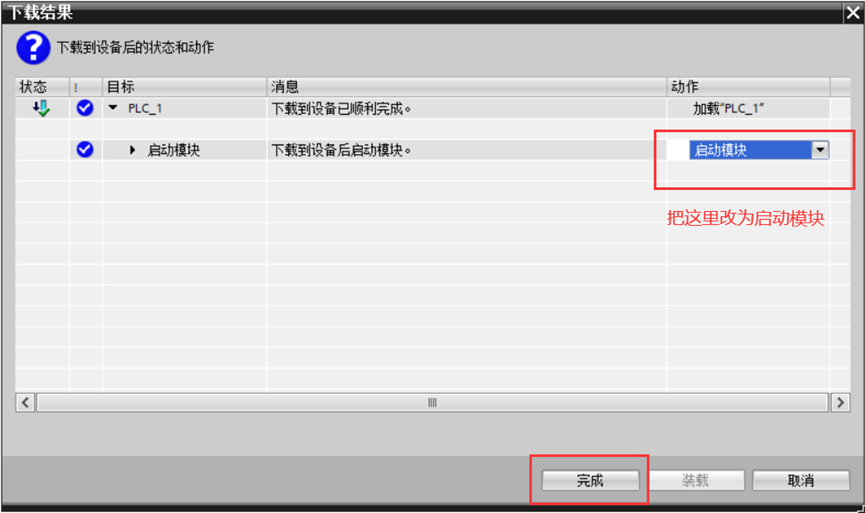
(19)下载PLC程序到PLCSim
(20)查看PLCSim状态
(21)检查修改的IP地址是谁的IP地址
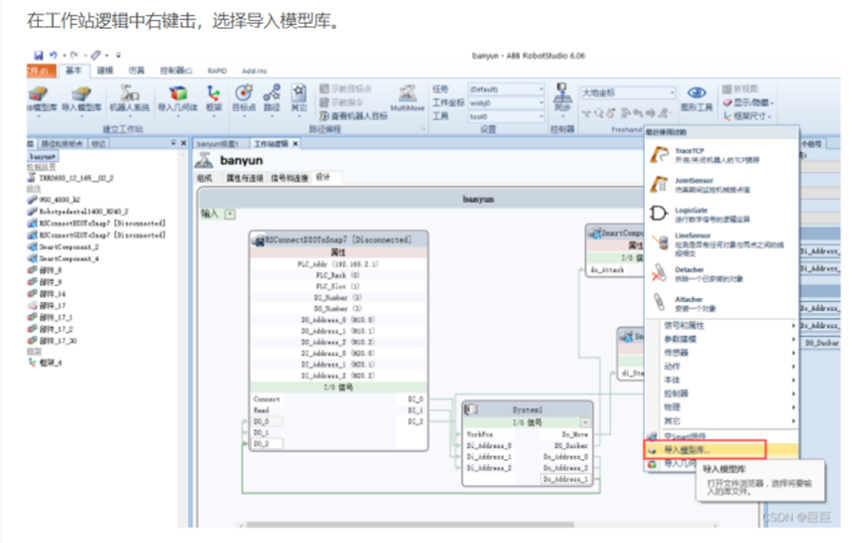
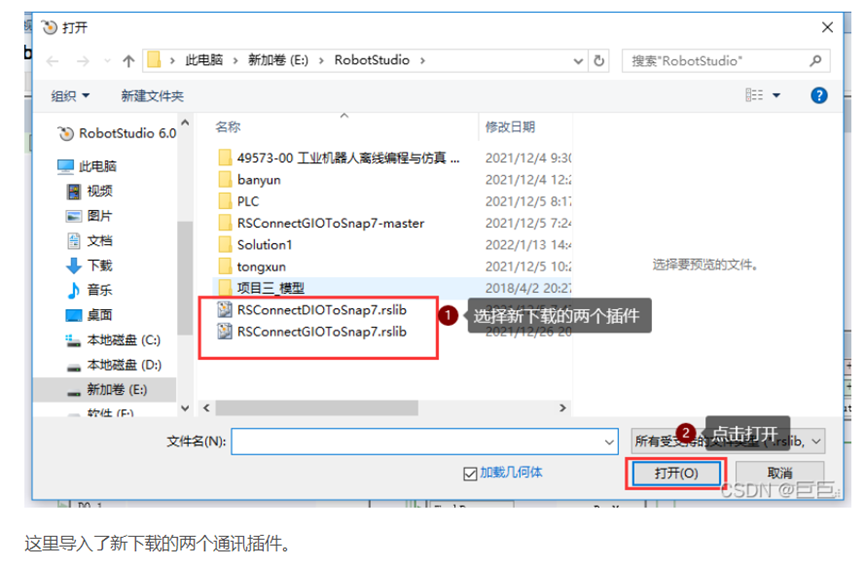
(22)导入通讯插件
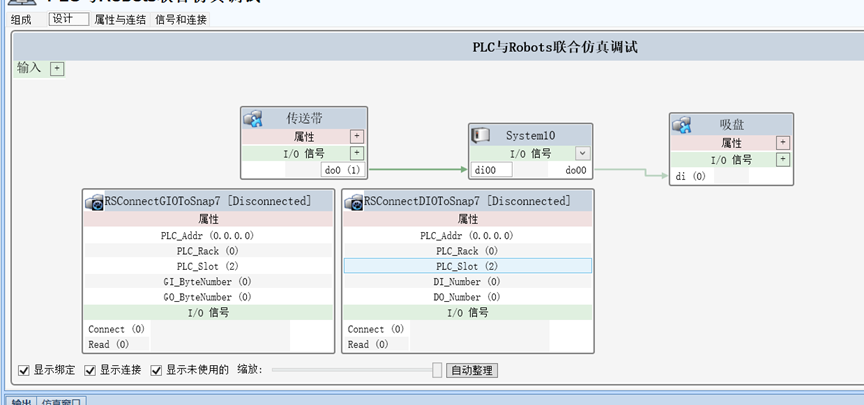
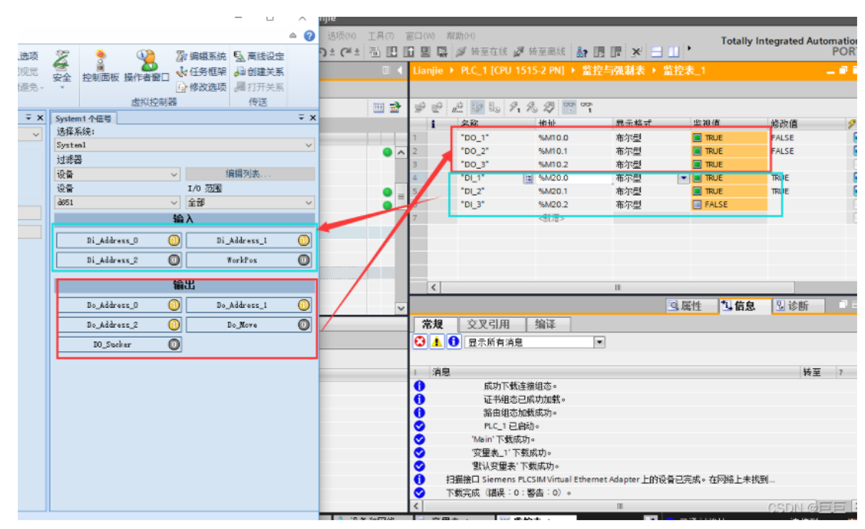
(23)创建连接信号
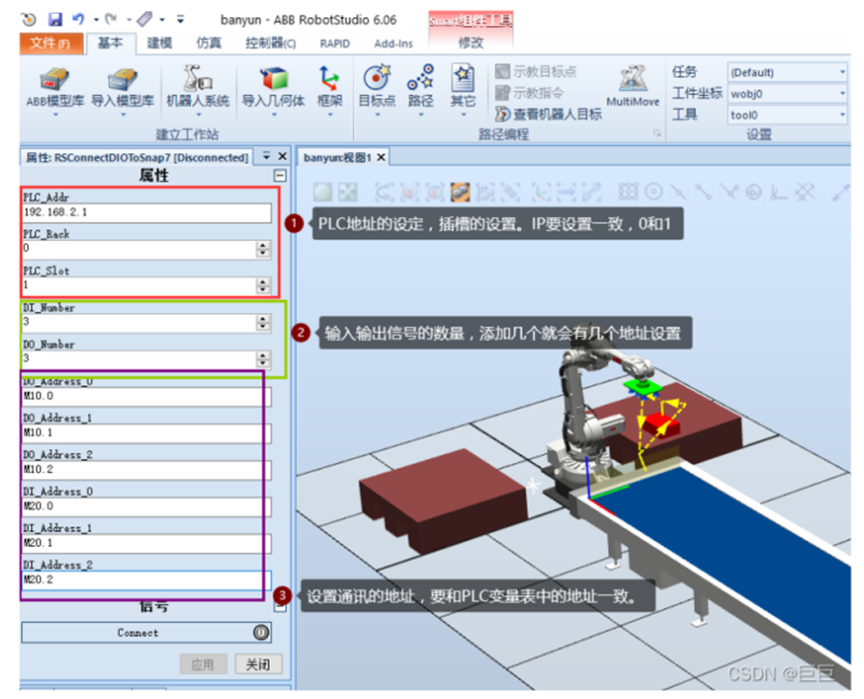
(24)创建硬件关联信号
建立完成之后热重启
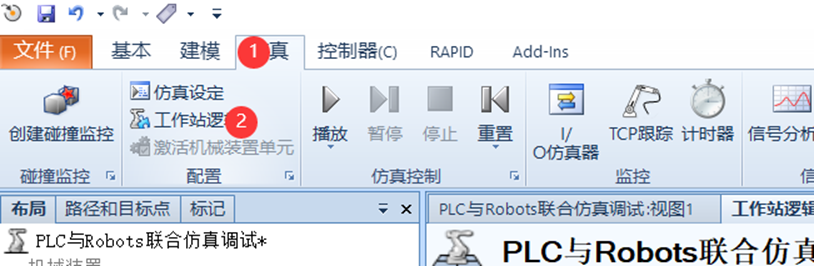
(25)建立仿真逻辑关系

(26)创建检测表
(27)仿真检测


















 4226
4226

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











