







 文章详细阐述了多波束测深系统在安装和使用中的校准过程,特别是Roll、Pitch和Yaw三个关键参数的校正方法。通过实例展示了如何在不同地形条件下进行校准,以确保测量数据的准确性。同时,提到了在不同软件(如PDS和CARIS)中进行校准的注意事项和软件特性。
文章详细阐述了多波束测深系统在安装和使用中的校准过程,特别是Roll、Pitch和Yaw三个关键参数的校正方法。通过实例展示了如何在不同地形条件下进行校准,以确保测量数据的准确性。同时,提到了在不同软件(如PDS和CARIS)中进行校准的注意事项和软件特性。
众所周知,想要获得高质量的多波束测深数据,首先必须保证多波束和姿态仪安装稳定可靠,其次要求多波束和姿态仪安装校正参数正确。便携式多波束一般采用船舷侧挂安装方式,安装位置最好位于船舷中部平整处,姿态仪宜安装在靠近船舶重心且不易避碰的地方。无论是多波束还是姿态仪,多波束和姿态仪的安装角度要尽量小,推荐方法是在安装的时候用水平尺或者带平衡功能的手机找平。
在使用1PPS信号同步的情况下,多波束安装校准涉及到三个参数,分别是横摇(Roll)、纵倾(Pitch)和航向(Yaw)。在实际作业中,横摇和航向参数校准操作比较简单,纵倾参数校准时常会令人困惑,难以抉择。在举例说明这个问题之前,我们简单阐述多波束参数校准的理论。为了更好地理解这些理论,每个校准参数都用双图辅助描述。
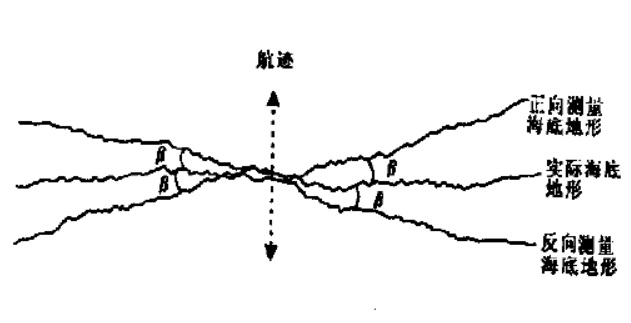
1、Roll值校正。Roll值的存在将导致从斜距到水深转换存在误差,误差大小与水深密切相关,水越深转换的深度误差也就越大。校正Roll值时需要海底地形平坦,在同一条测线上采用相同的船速,但方向相反测量2组数据。2组测量的水深数据叠加到一块,会发现从中央波束到边缘波束两者测量的水深差值在加大,呈“X”形状。计算该值时要取两条测线重叠部分的数据,计算精度取至0.01°。
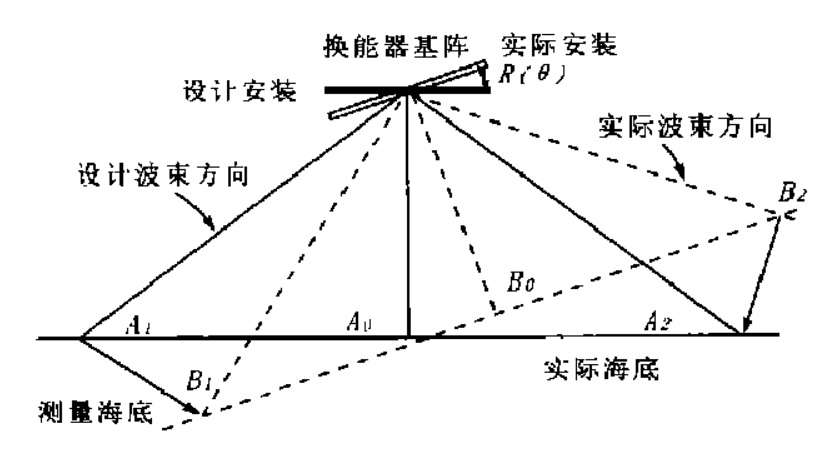
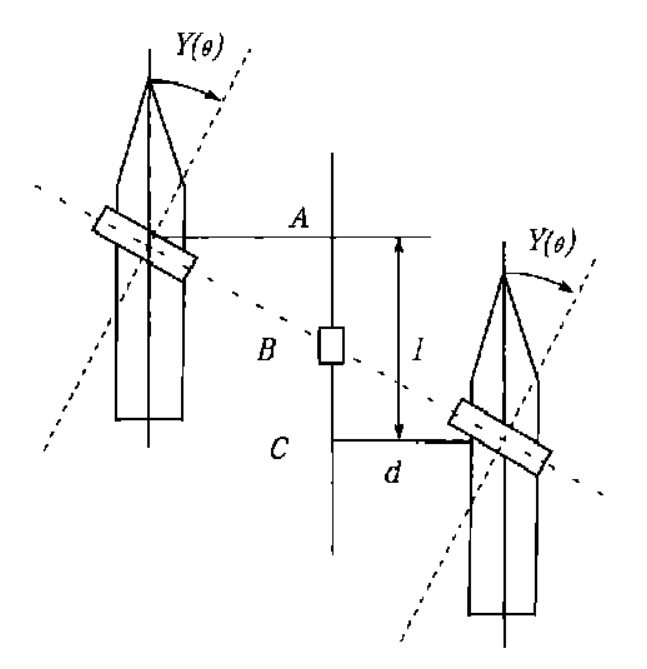
2、Pitch值校正。Pitch值的存在主要影响测深位置偏差(图中l为往返测量的位置偏差),该值是多波束系统沿垂直于船向的轴旋转的角度与水深的函数。校正Pitch值时需要有特征地物的海底或者斜坡,并垂直特征地物或斜坡方向布置测线,测量两组数据,船速相同,但方向相反。2组数据叠加到一块,为了避免Yaw值的影响,仅采用2条测线的中央波束数据,校正值精度取至0.01°。

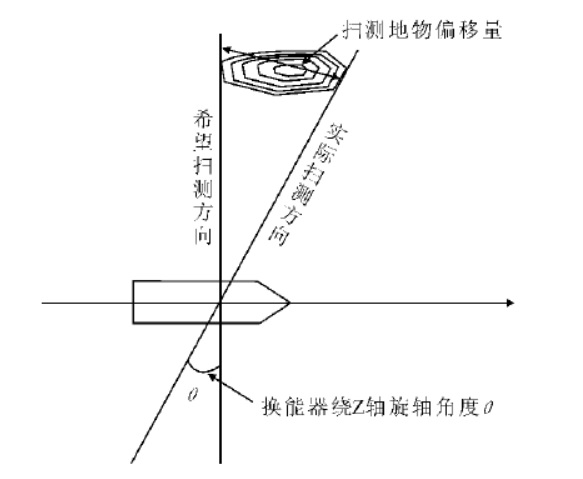
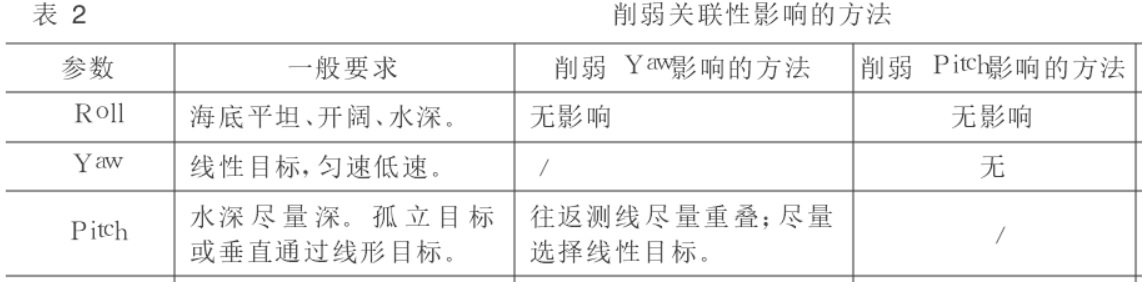
3、Yaw值校正。Yaw值的存在也会影响测深位置的偏差(图中l为同向测量的位置偏差),且边缘波束误差最大,中央波束的误差可以忽略。校正Yaw值时需要特征地物的海底或者斜坡,在特征地物上或垂直斜坡方向布置两条平行测线,测线间距设为水深的2倍,采集数据时测量船只按相同的航向及船速行驶。校正计算时,只取两条测线重叠部分的数据,计算精度取至0.01°。
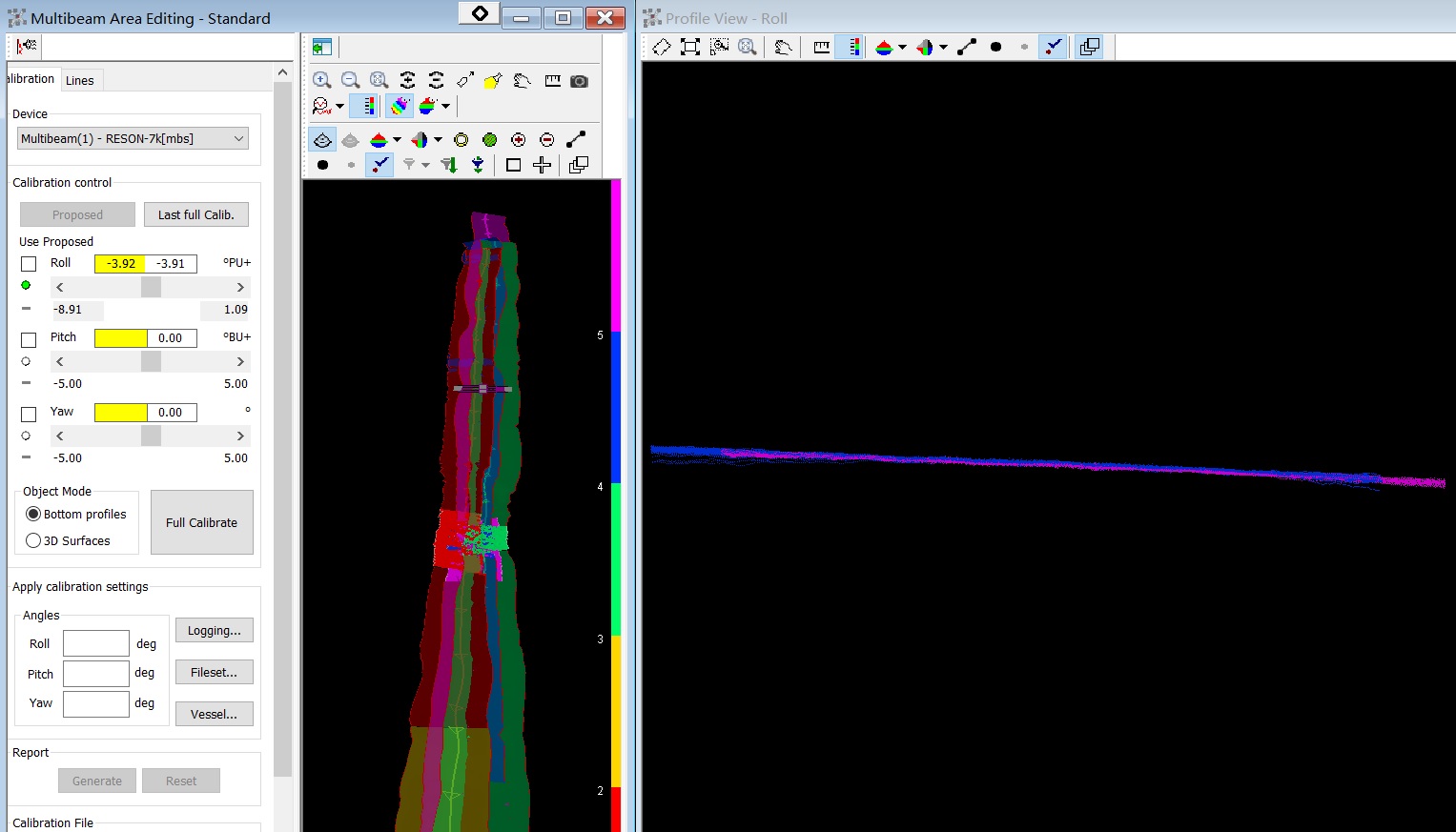
按照上面的理论,以某次外业校准测量的数据为例,使用PDS的校准模块说明多波束安装参数的校准操作。
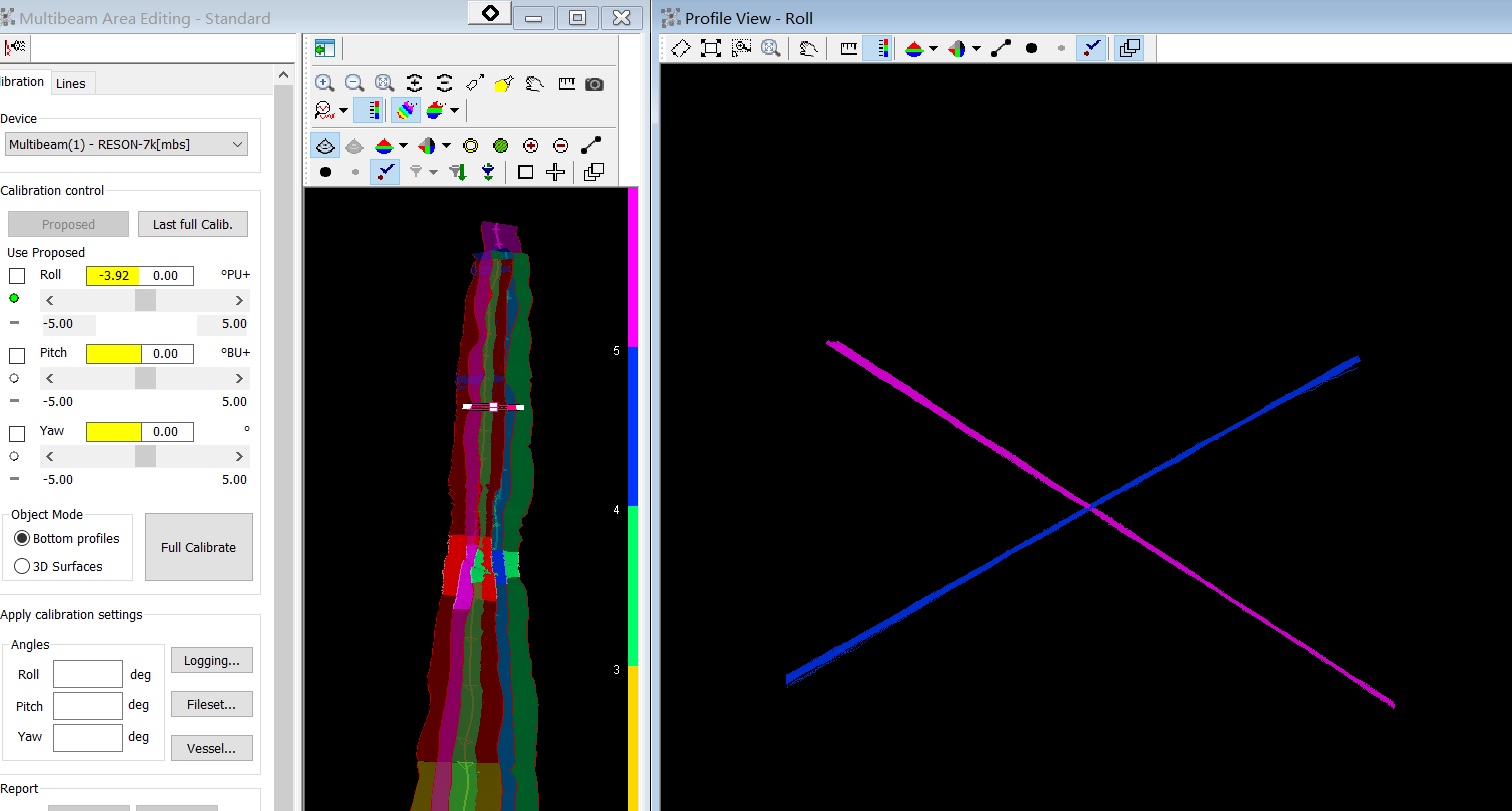
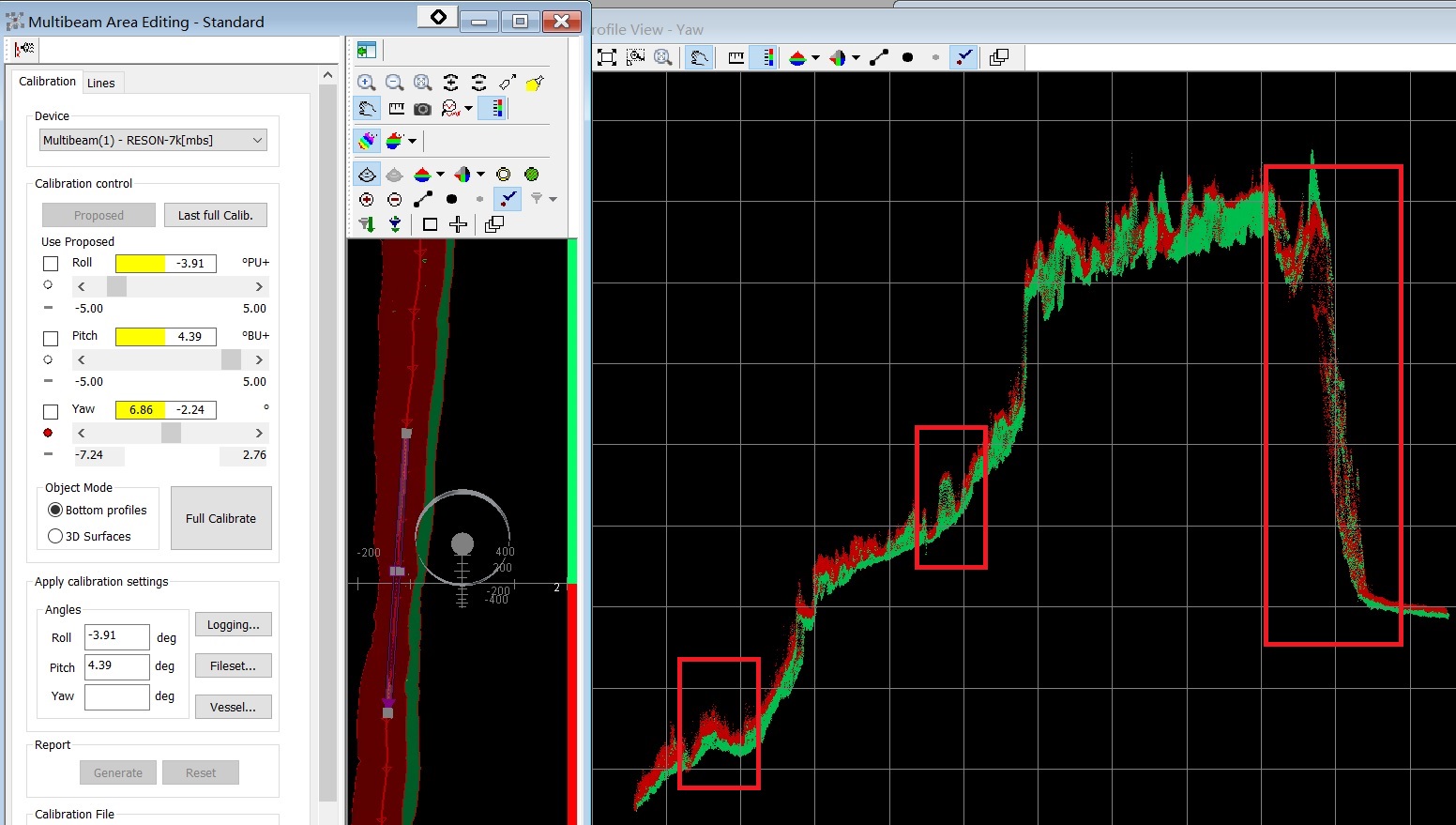
1、Roll值校准,在往返测线的平坦水域垂直于测线方向拉一个校准剖面,往返测线的水深数据在剖面窗口呈现为“X”形状,调整Roll值,直到往返测线水深数据重合。Roll的校准值为-3.91°。
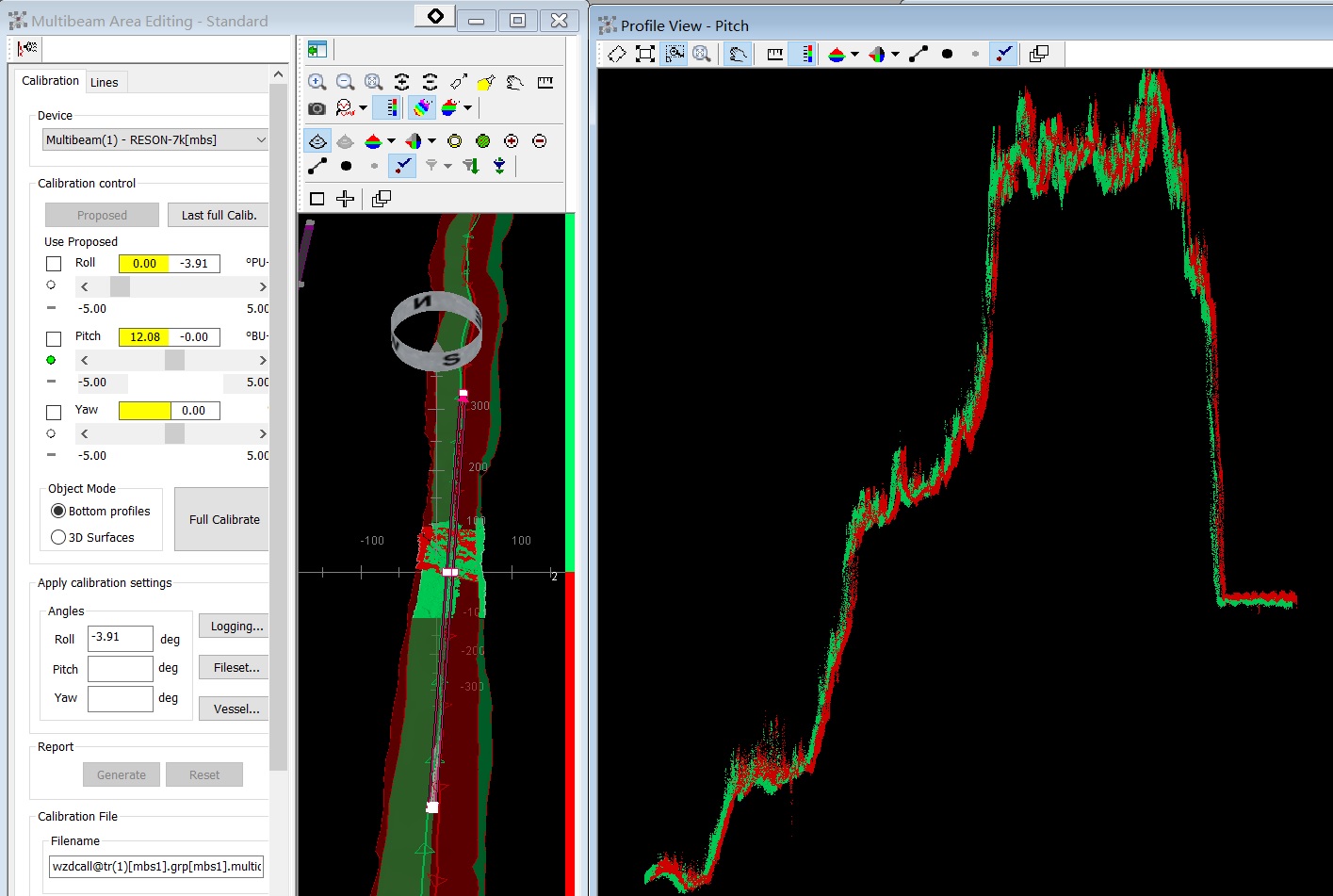
2、Pitch值校准
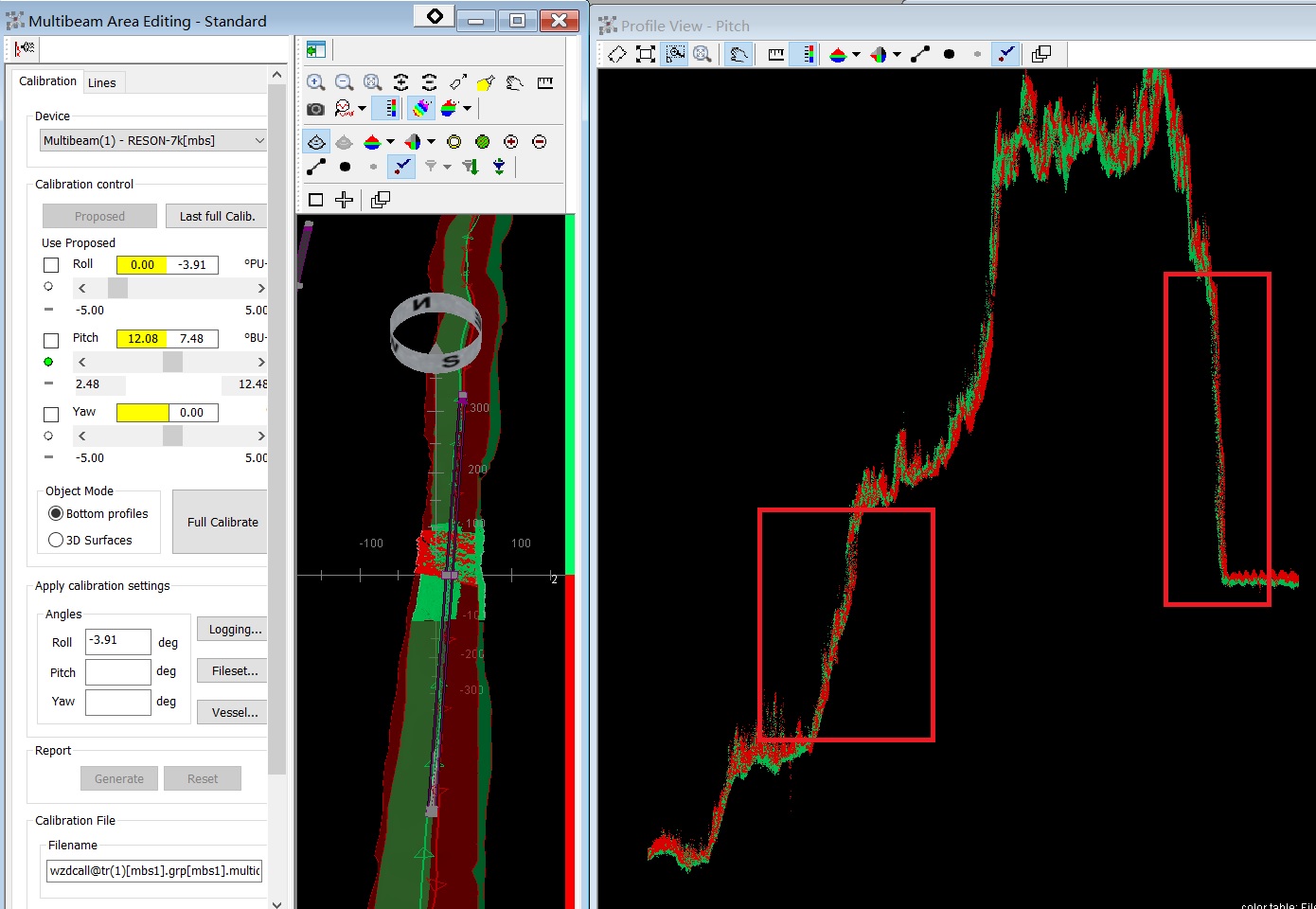
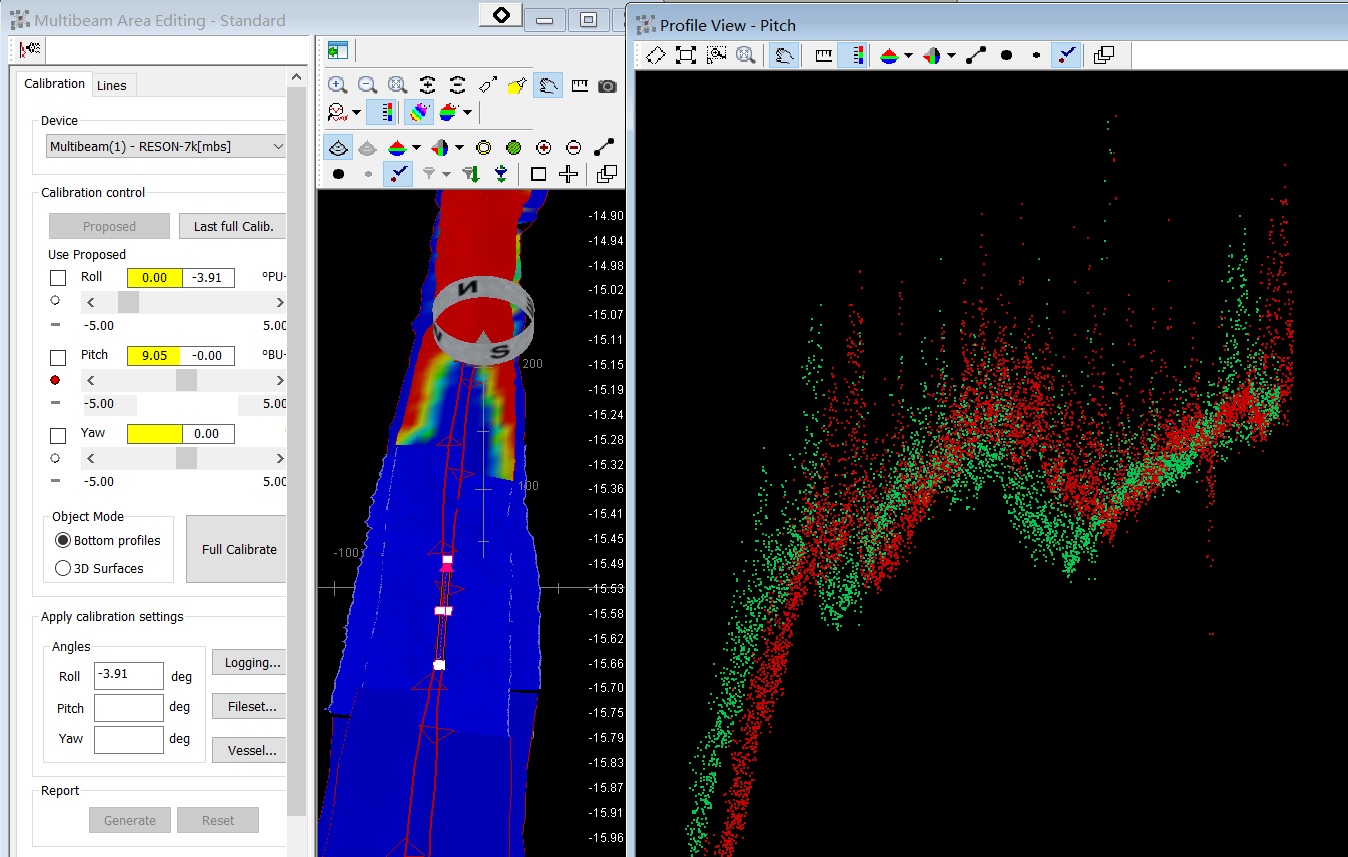
在往返测线的斜坡水域平行于测线方向拉一个校准剖面,往返测线的水深数据在剖面窗口呈现为分离状态,调整Pitch值,直到往返测线水深数据重合。从下图中可以看出Pitch值为7.48°。如果Pitch值真是这样的,那么设备安装可能会有问题。我们检查了多波束的安装,安装没有问题。那么,问题出在往返测线不是直的,不是完全重叠的,而本次校准区域地形比较复杂,再使用如此剖面不是合适的,除非坡面是那种理想的宽阔平缓的情况。
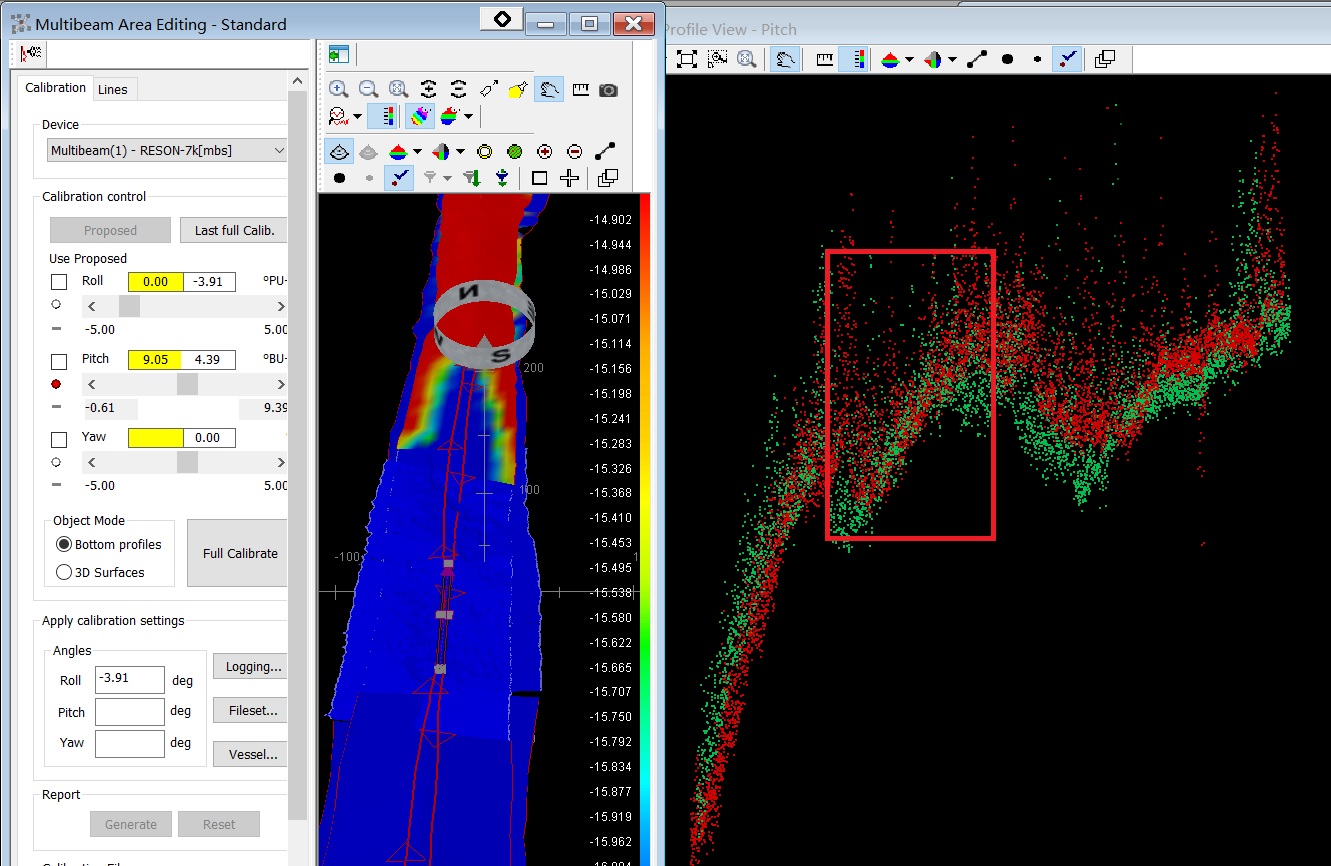
因此,我们需要选择往返测线合适的位置即往返测线较为平直,地形变化不那么陡峭的区域进行Pitch的校准。Pitch值为4.39°,后来在CARIS的callibrate模块中,此Pitch值基本是正确的。
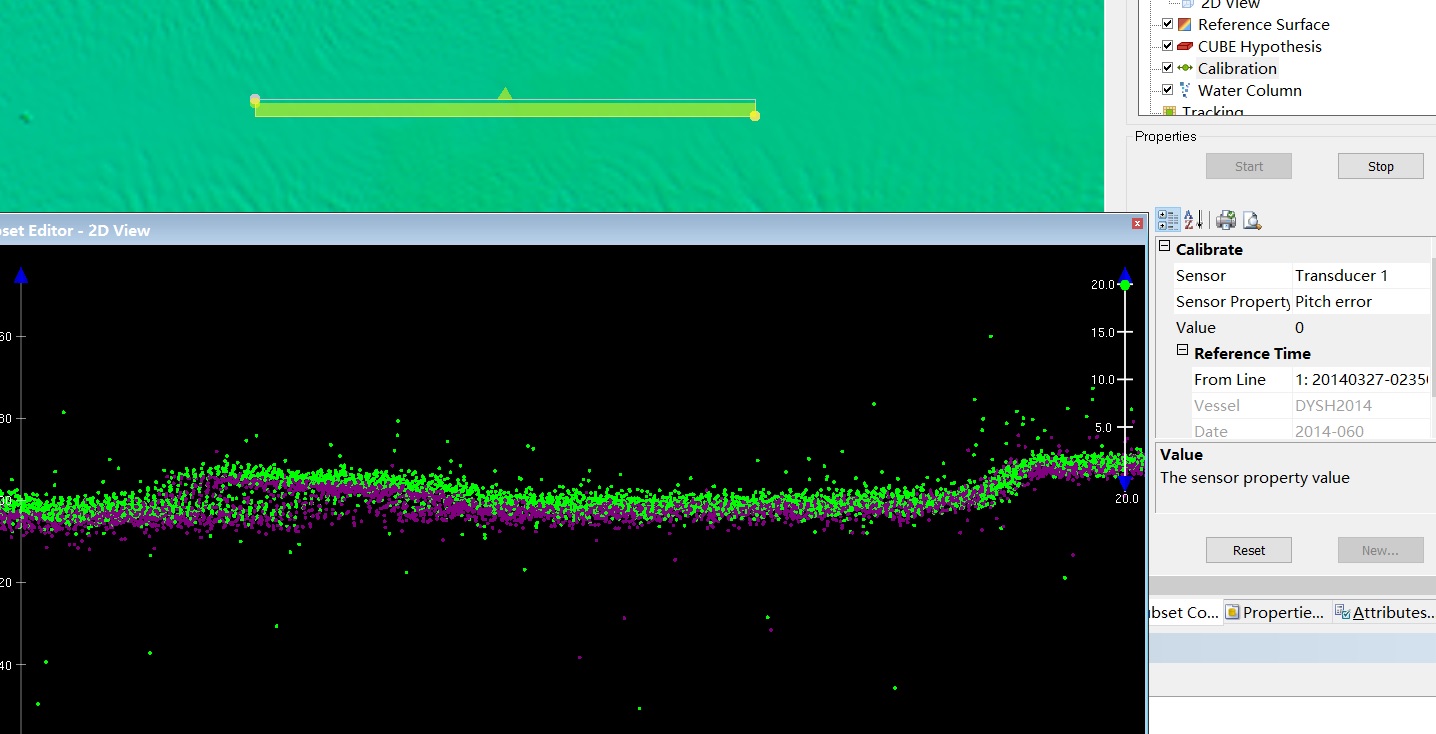
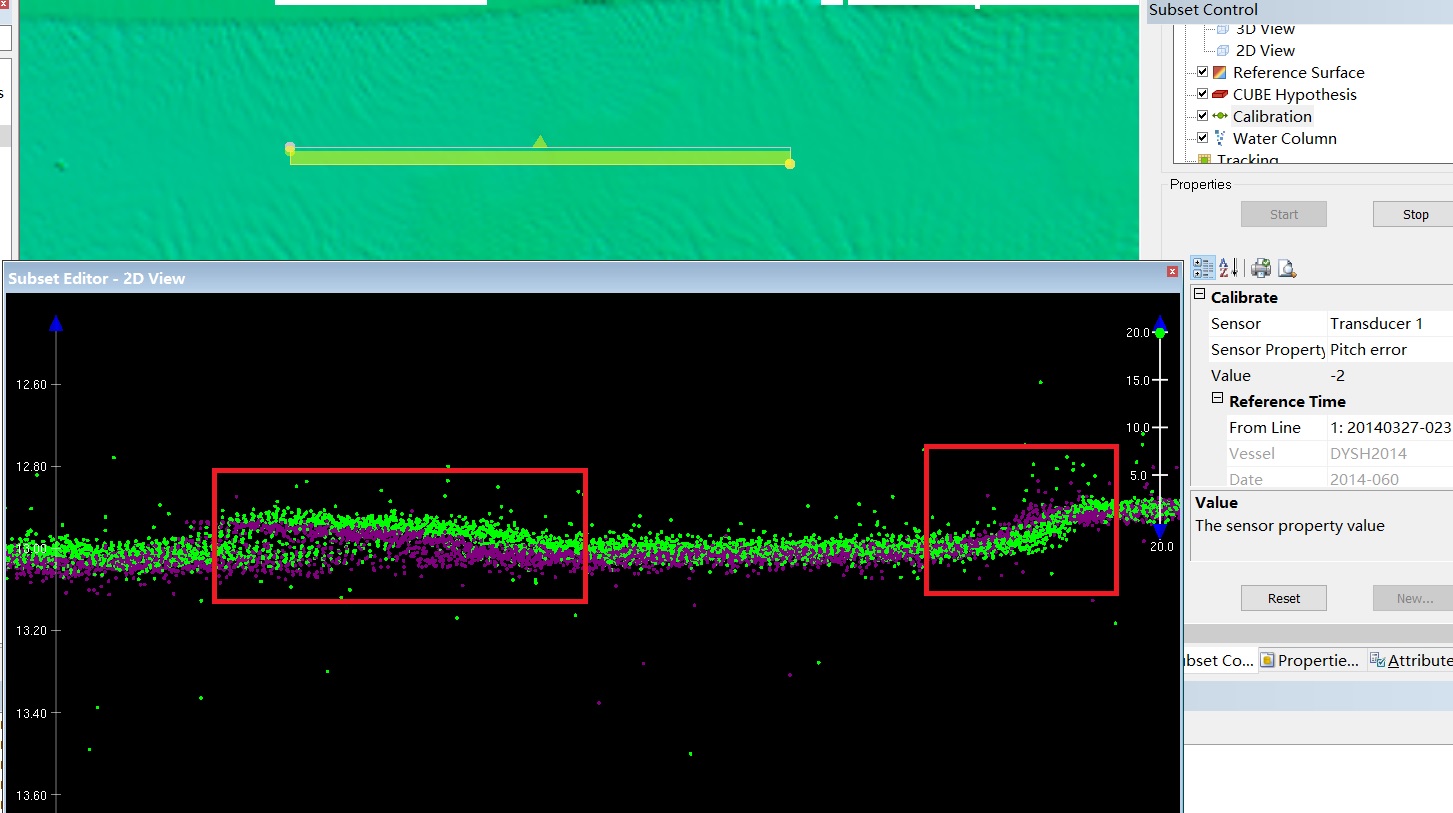
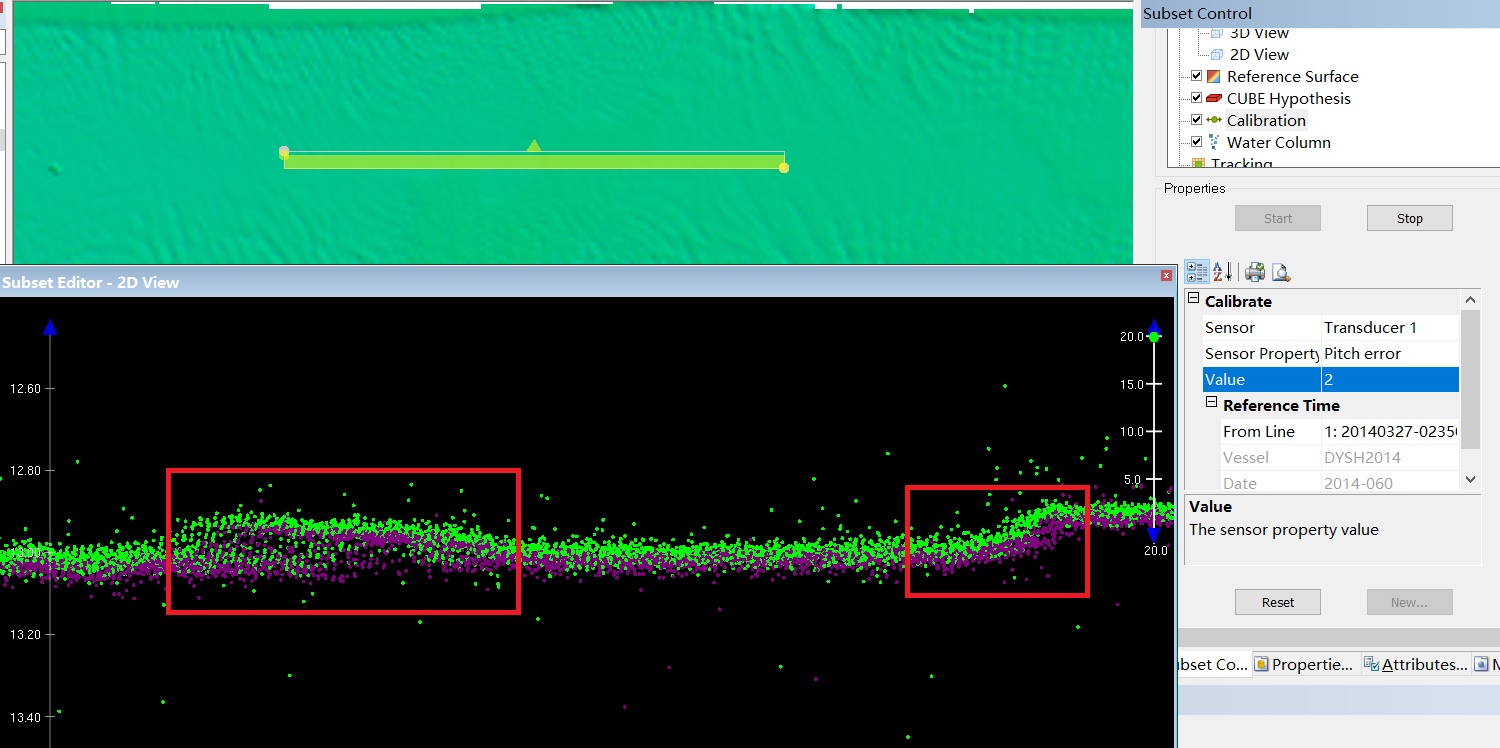
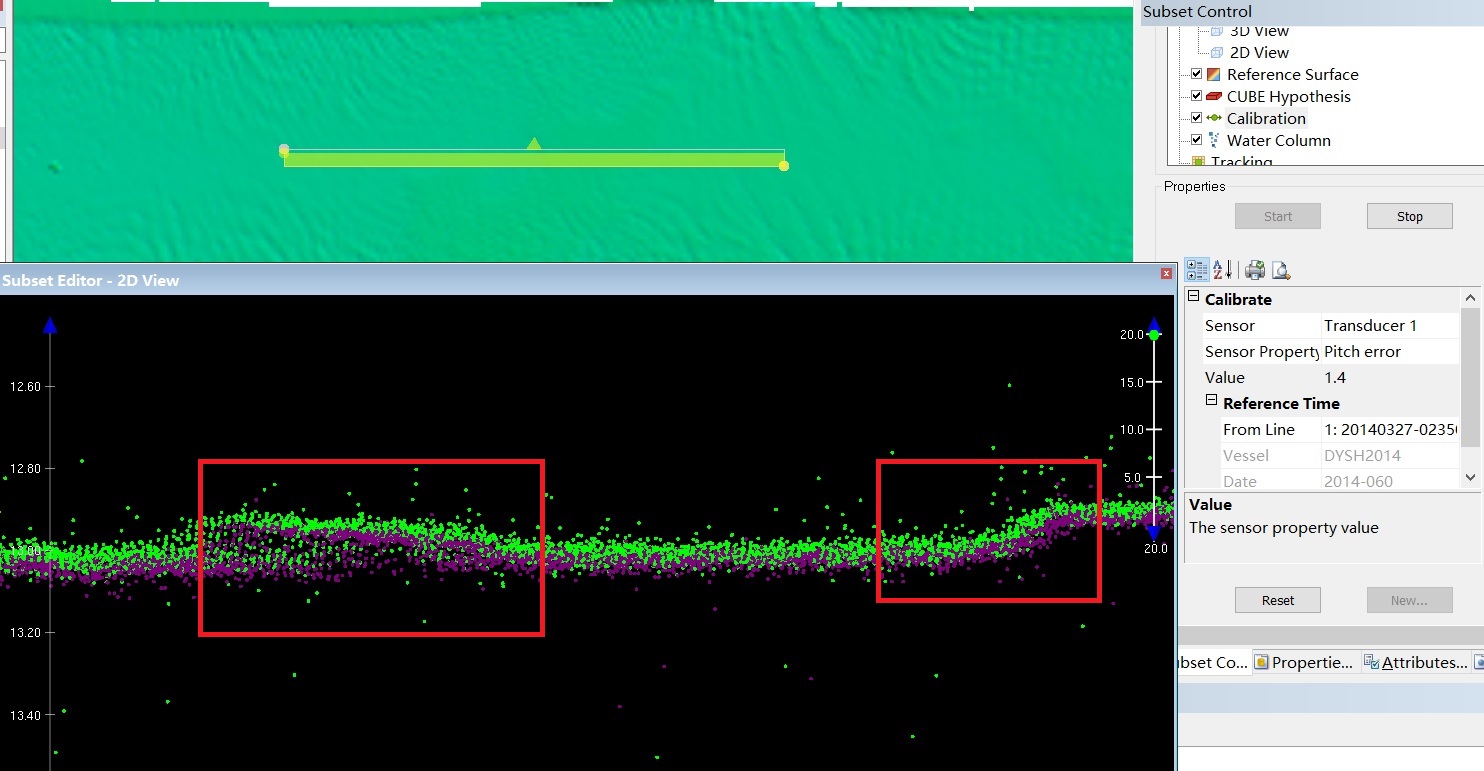
其实,只要往返测线平直且重叠良好,Pitch校准只需要有个微地形就可以。下面就是使用微地形进行校准的例子,数据采集年份是2014年,校准软件使用的是CARIS的校准模块。下面四张图分别是Pitch值为0°、-2°、2°和1.4°时往返测线的剖面图。最终确定Pitch的校准值是1.4°。
3、Yaw值校准。在同向测线的斜坡水域平行于测线方向拉一个校准剖面,同向测线的水深数据在剖面窗口呈现为分离状态,调整Yaw值,直到往返测线水深数据重合。Yaw的校准值为-2.24°。。

小结
在时间容许的情况下,校准测线航迹尽量做到平直和平行(或重叠),使用Teledyne PDS校准的难度会降低一些。另外,Teledyne PDS软件还会出现一些莫名其妙的bug,建议使用CARIS处理多波束数据的同学可在CARIS进行三参数校准。由于CARIS和PDS的坐标系统在竖直方向是相反的,因此,在CARIS校准得到的Yaw值需要反向再填在在PDS配置文件中。
参考文献
多波束系统横摇、纵倾参数的校正方法_刘方兰
多波束系统安装偏差造成的误差分析及校正方法探讨_邓卫红
多波束测深系统换能器的安装校准分析_张海涛
多波束测深系统的安装校准_王闰成
多波束安装校准中各参数关联性分析_张彦昌




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












{kind=link}