









e2studio开发RA2E1.19-- 独立看门狗IWDT
- 概述
- 视频教学
- 样品申请
- 硬件准备
- 参考程序
- 源码下载
- 新建工程
- 工程模板
- 保存工程路径
- 芯片配置
- 工程模板选择
- 时钟设置
- UART配置
- UART属性配置
- 设置e2studio堆栈
- e2studio的重定向printf设置
- R_SCI_UART_Open()函数原型
- 回调函数user_uart_callback ()
- printf输出重定向到串口
- RTC配置
- RTC属性配置
- 设定时间
- 回调函数
- R_RTC_Open函数
- IWDT配置
- IWDT属性配置
- OFS0属性配置
- R_IWDT_Open()函数原型
- R_IWDT_Refresh()函数原型
- R_IWDT_CounterGet()函数原型
- IWDT周期设定
- IWDT计数周期
- J-Link调试器的限制
- 主程序
- 演示效果
概述
本文主要阐述了如何借助e2studio工具对瑞萨独立看门狗IWDT进行配置设置,同时设置RTC时钟产生每秒的周期性中断,并通过串口输出观察独立看门狗IWDT的计数情况。
配置看门狗定时器以提高系统稳定性,防止系统长时间处于死循环。
最近在瑞萨RA的课程,需要样片的可以加qun申请:925643491。
视频教学
https://www.bilibili.com/video/BV1AS9aYMEXt/
e2studio开发RA2E1(19)----独立看门狗IWDT
样品申请
https://www.wjx.top/vm/rCrkUrz.aspx
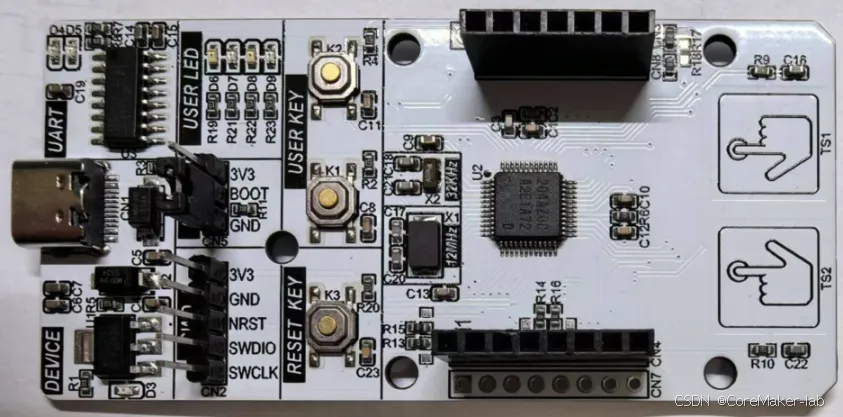
硬件准备
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。
主控为R7FA2E1A72DFL#AA0

参考程序
https://github.com/CoreMaker-lab/RA2E1
https://gitee.com/CoreMaker/RA2E1
源码下载
https://download.csdn.net/download/xinzuofang/90458109
新建工程

工程模板

保存工程路径

芯片配置
本文中使用R7FA2E1A72DFL#AA0来进行演示。

工程模板选择

时钟设置
开发板上的外部高速晶振为12M.

需要修改XTAL为12M。

UART配置

点击Stacks->New Stack->Connectivity -> UART(r_sci_uart)。

UART属性配置

设置e2studio堆栈
printf函数通常需要设置堆栈大小。这是因为printf函数在运行时需要使用栈空间来存储临时变量和函数调用信息。如果堆栈大小不足,可能会导致程序崩溃或不可预期的行为。
printf函数使用了可变参数列表,它会在调用时使用栈来存储参数,在函数调用结束时再清除参数,这需要足够的栈空间。另外printf也会使用一些临时变量,如果栈空间不足,会导致程序崩溃。
因此,为了避免这类问题,应该根据程序的需求来合理设置堆栈大小。

e2studio的重定向printf设置

在嵌入式系统的开发中,尤其是在使用GNU编译器集合(GCC)时,–specs 参数用于指定链接时使用的系统规格(specs)文件。这些规格文件控制了编译器和链接器的行为,尤其是关于系统库和启动代码的链接。–specs=rdimon.specs 和 --specs=nosys.specs 是两种常见的规格文件,它们用于不同的场景。
–specs=rdimon.specs
用途: 这个选项用于链接“Redlib”库,这是为裸机(bare-metal)和半主机(semihosting)环境设计的C库的一个变体。半主机环境是一种特殊的运行模式,允许嵌入式程序通过宿主机(如开发PC)的调试器进行输入输出操作。
应用场景: 当你需要在没有完整操作系统的环境中运行程序,但同时需要使用调试器来处理输入输出(例如打印到宿主机的终端),这个选项非常有用。
特点: 它提供了一些基本的系统调用,通过调试接口与宿主机通信。
–specs=nosys.specs
用途: 这个选项链接了一个非常基本的系统库,这个库不提供任何系统服务的实现。
应用场景: 适用于完全的裸机程序,其中程序不执行任何操作系统调用,比如不进行文件操作或者系统级输入输出。
特点: 这是一个更“裸”的环境,没有任何操作系统支持。使用这个规格文件,程序不期望有操作系统层面的任何支持。
如果你的程序需要与宿主机进行交互(如在开发期间的调试),并且通过调试器进行基本的输入输出操作,则使用 --specs=rdimon.specs。
如果你的程序是完全独立的,不需要任何形式的操作系统服务,包括不进行任何系统级的输入输出,则使用 --specs=nosys.specs。

R_SCI_UART_Open()函数原型

故可以用 R_SCI_UART_Open()函数进行配置,开启和初始化UART。
/* Open the transfer instance with initial configuration. */
err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg);
assert(FSP_SUCCESS == err);
回调函数user_uart_callback ()
当数据发送的时候,可以查看UART_EVENT_TX_COMPLETE来判断是否发送完毕。


可以检查检查 “p_args” 结构体中的 “event” 字段的值是否等于 “UART_EVENT_TX_COMPLETE”。如果条件为真,那么 if 语句后面的代码块将会执行。
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
printf输出重定向到串口
打印最常用的方法是printf,所以要解决的问题是将printf的输出重定向到串口,然后通过串口将数据发送出去。
注意一定要加上头文件#include <stdio.h>
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i<size;i++)
{
__io_putchar(*pBuffer++);
}
return size;
}
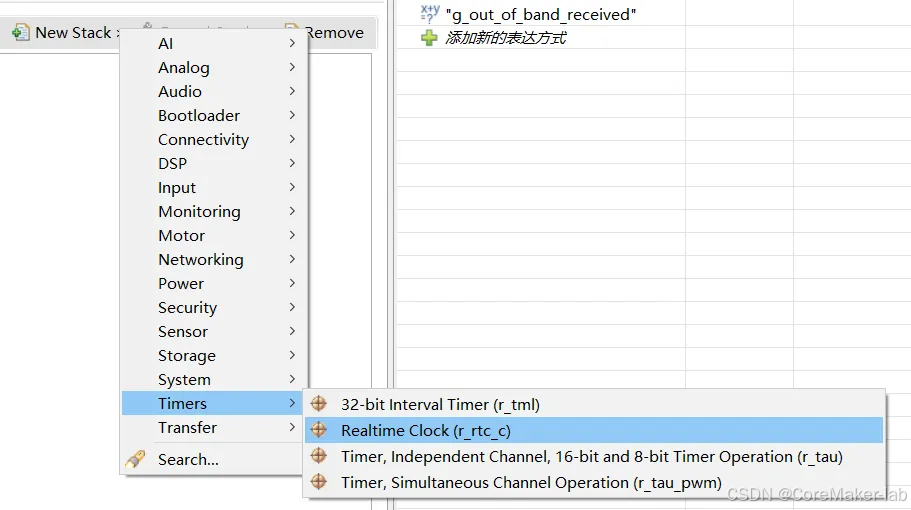
RTC配置
点击Stacks->New Stack->Timers -> Realtime Clock(r_rtc_c)。
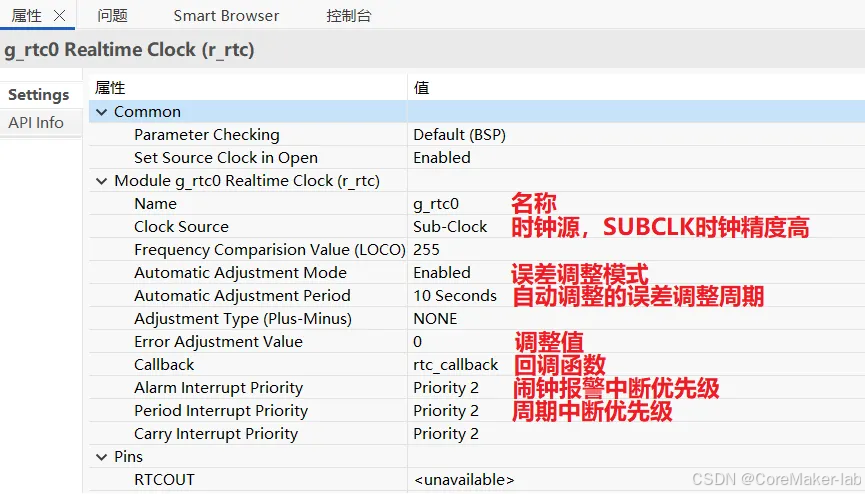
RTC属性配置
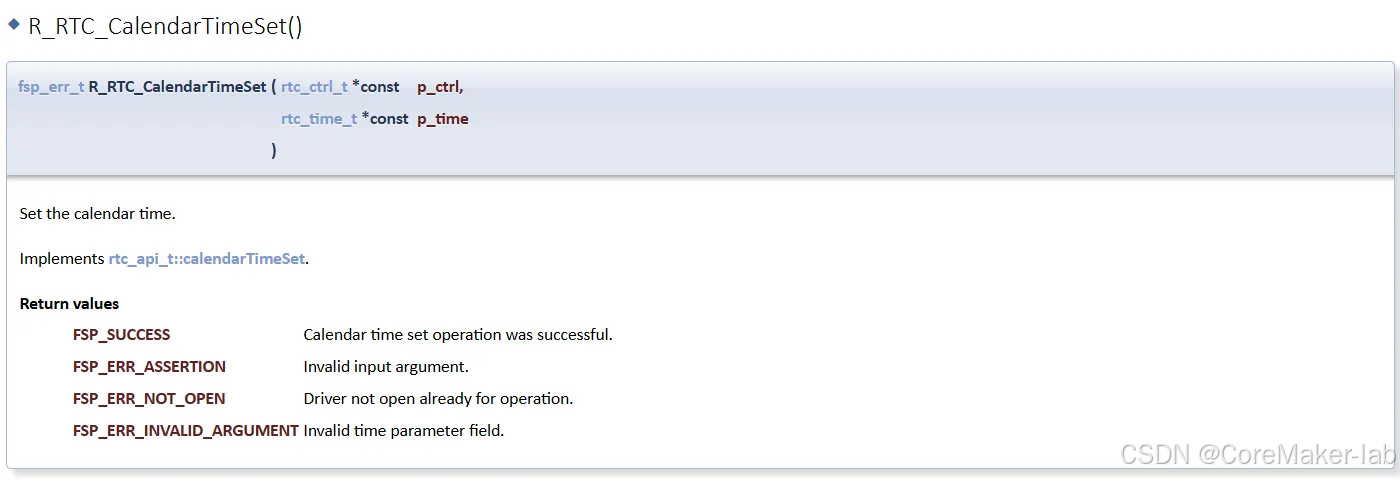
设定时间
在启动RTC后,需要为其设定当前时间。您可以使用R_RTC_CalendarTimeSet(&g_rtc0_ctrl, &set_time);函数来实现这一目标。具体的时间参数可以通过修改set_time变量来调整。
//RTC变量
/* rtc_time_t is an alias for the C Standard time.h struct 'tm' */
rtc_time_t set_time =
{
.tm_sec = 50, /* 秒,范围从 0 到 59 */
.tm_min = 59, /* 分,范围从 0 到 59 */
.tm_hour = 23, /* 小时,范围从 0 到 23*/
.tm_mday = 28, /* 一月中的第几天,范围从 1 到 31*/
.tm_mon = 1, /* 月份,范围从 0 到 11*/
.tm_year = 125, /* 自 1900 起的年数,2025为125*/
.tm_wday = 5, /* 一周中的第几天,范围从 0 到 6*/
// .tm_yday=0, /* 一年中的第几天,范围从 0 到 365*/
// .tm_isdst=0; /* 夏令时*/
};
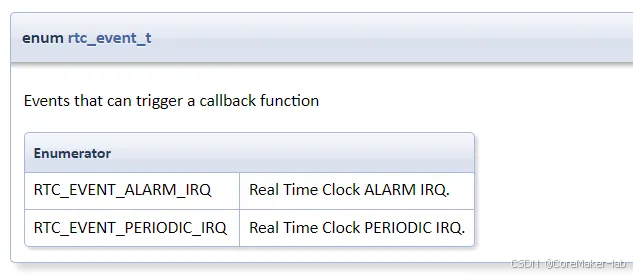
回调函数
可以触发进入回调函数的事件如下所示,RTC_EVENT_PERIODIC_IRQ为设置的实时性事件,例如1s一次,RTC_EVENT_ALARM_IRQ为闹钟事件。
//RTC回调函数
volatile bool rtc_flag = 0;//RTC延时1s标志位
volatile bool rtc_alarm_flag = 0;//RTC闹钟
/* Callback function */
void rtc_callback(rtc_callback_args_t *p_args)
{
/* TODO: add your own code here */
if(p_args->event == RTC_EVENT_PERIODIC_IRQ)
rtc_flag=1;
else if(p_args->event == RTC_EVENT_ALARM_IRQ)
rtc_alarm_flag=1;
}
R_RTC_Open函数
R_RTC_Open函数可以开启RTC。
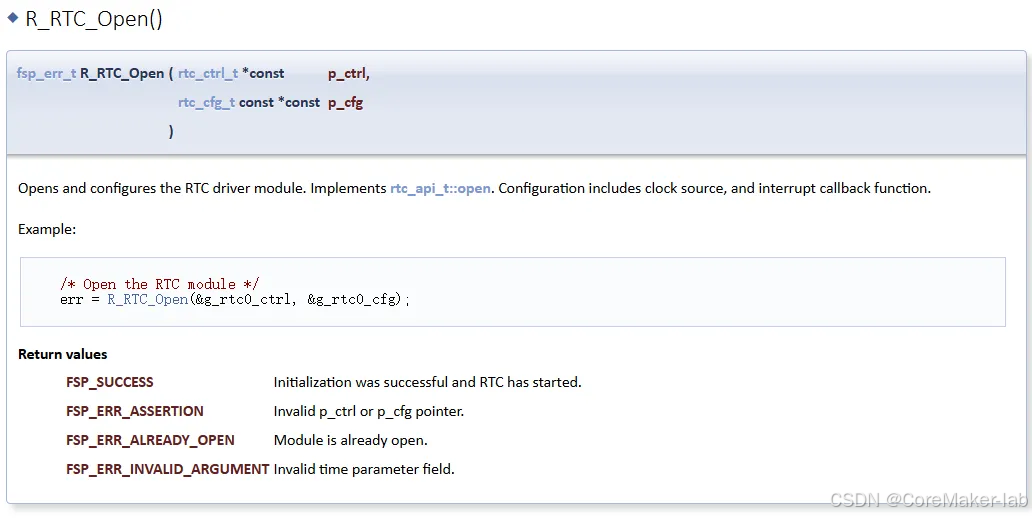
同时在主程序中开启RTC已经设置时间和闹钟。
/**********************RTC开启***************************************/
/* Initialize the RTC module*/
err = R_RTC_Open(&g_rtc0_ctrl, &g_rtc0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Set the RTC clock source. Can be skipped if "Set Source Clock in Open" property is enabled. */
R_RTC_ClockSourceSet(&g_rtc0_ctrl);
/* R_RTC_CalendarTimeSet must be called at least once to start the RTC */
R_RTC_CalendarTimeSet(&g_rtc0_ctrl, &set_time);
/* Set the periodic interrupt rate to 1 second */
R_RTC_PeriodicIrqRateSet(&g_rtc0_ctrl, RTC_PERIODIC_IRQ_SELECT_1_SECOND);
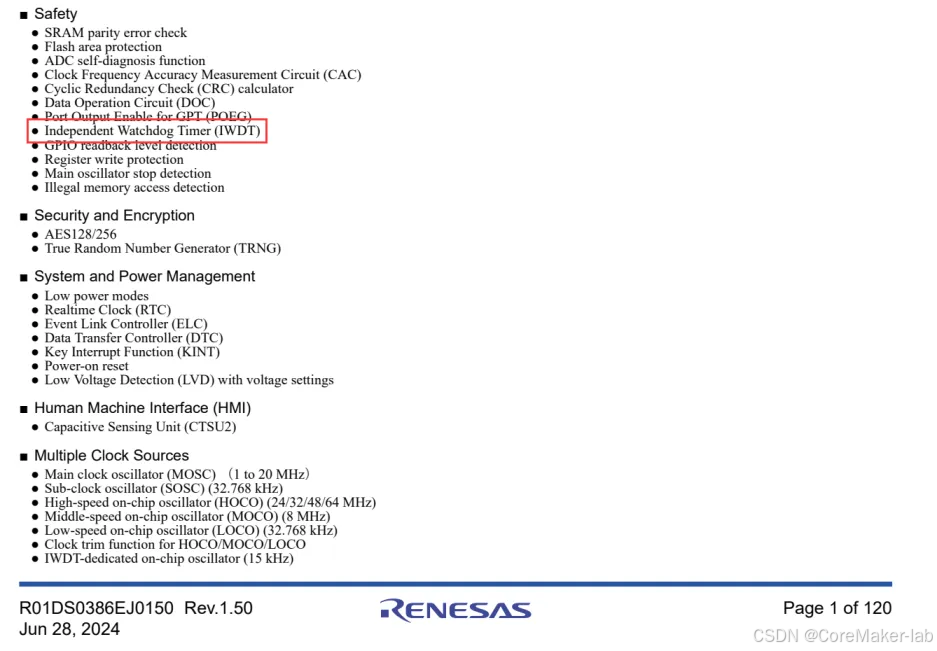
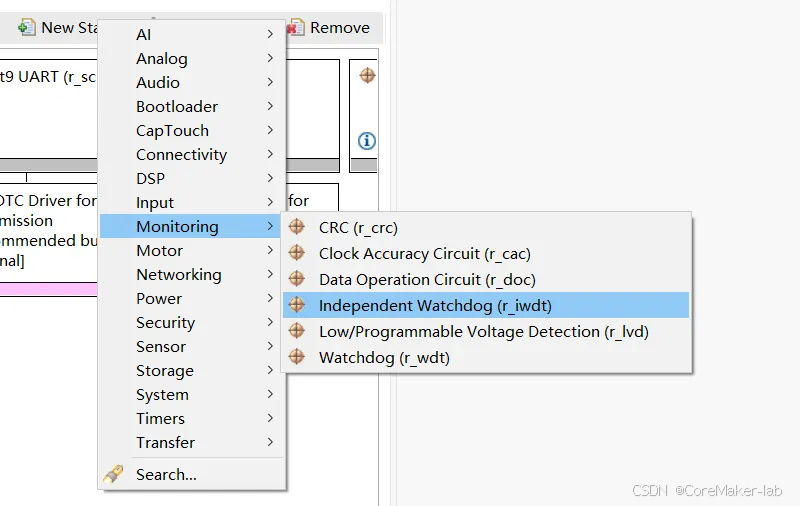
IWDT配置
RA2E1内部自带独立看门狗定时器(IWDT)。
点击Stacks->New Stack->Monitoring -> Independent Watchdog(r_iwdt)。
IWDT属性配置
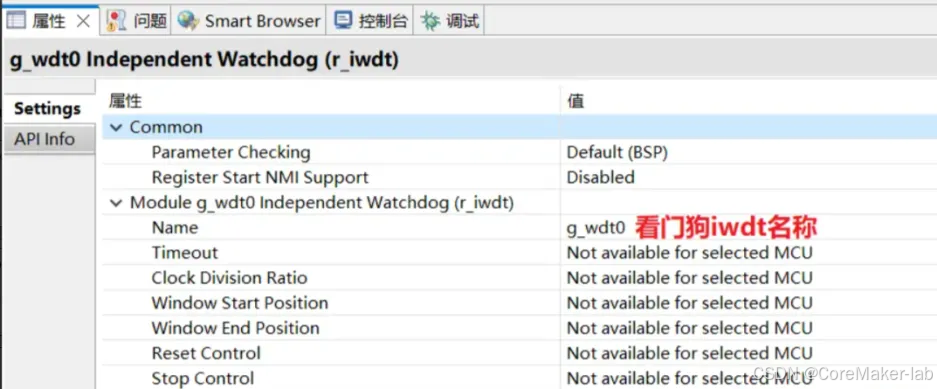
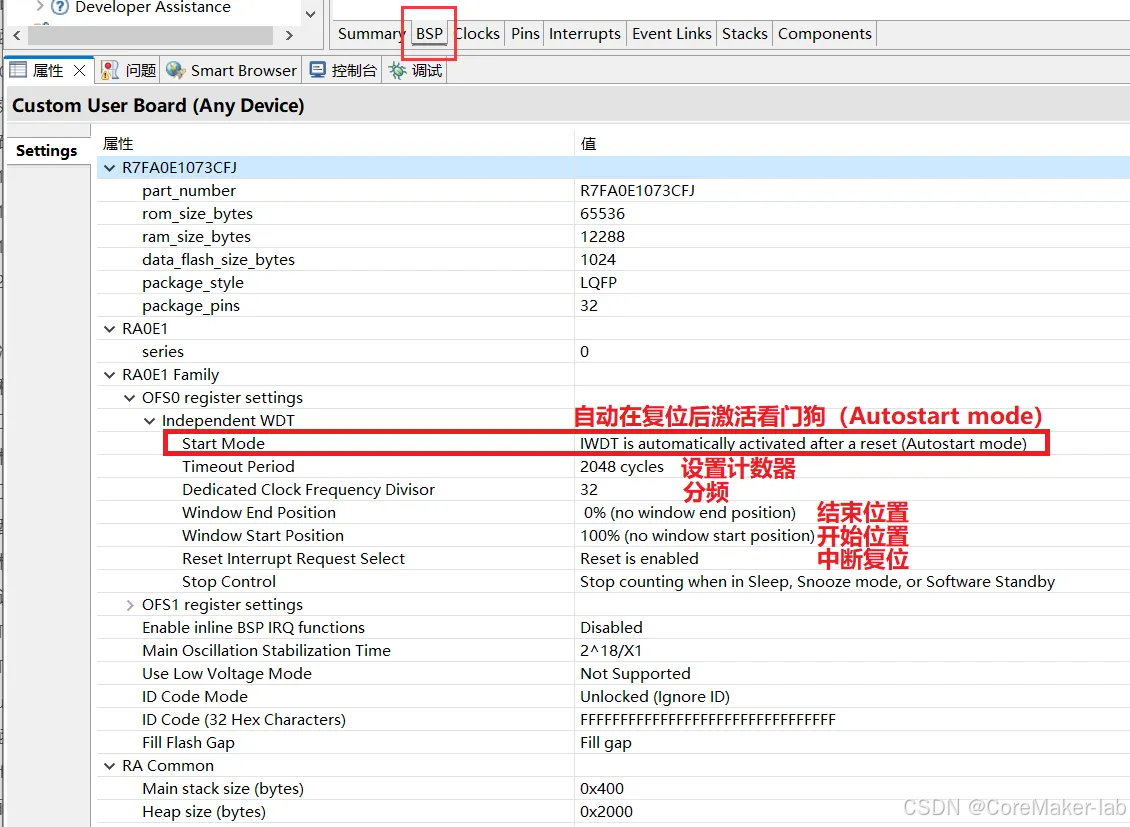
OFS0属性配置
OFS0(Option Function Select Register 0)是一个用于控制 MCU 启动时的一些关键配置的寄存器,主要设置 MCU 的看门狗定时器(IWDG,Independent Watchdog Timer)相关选项。

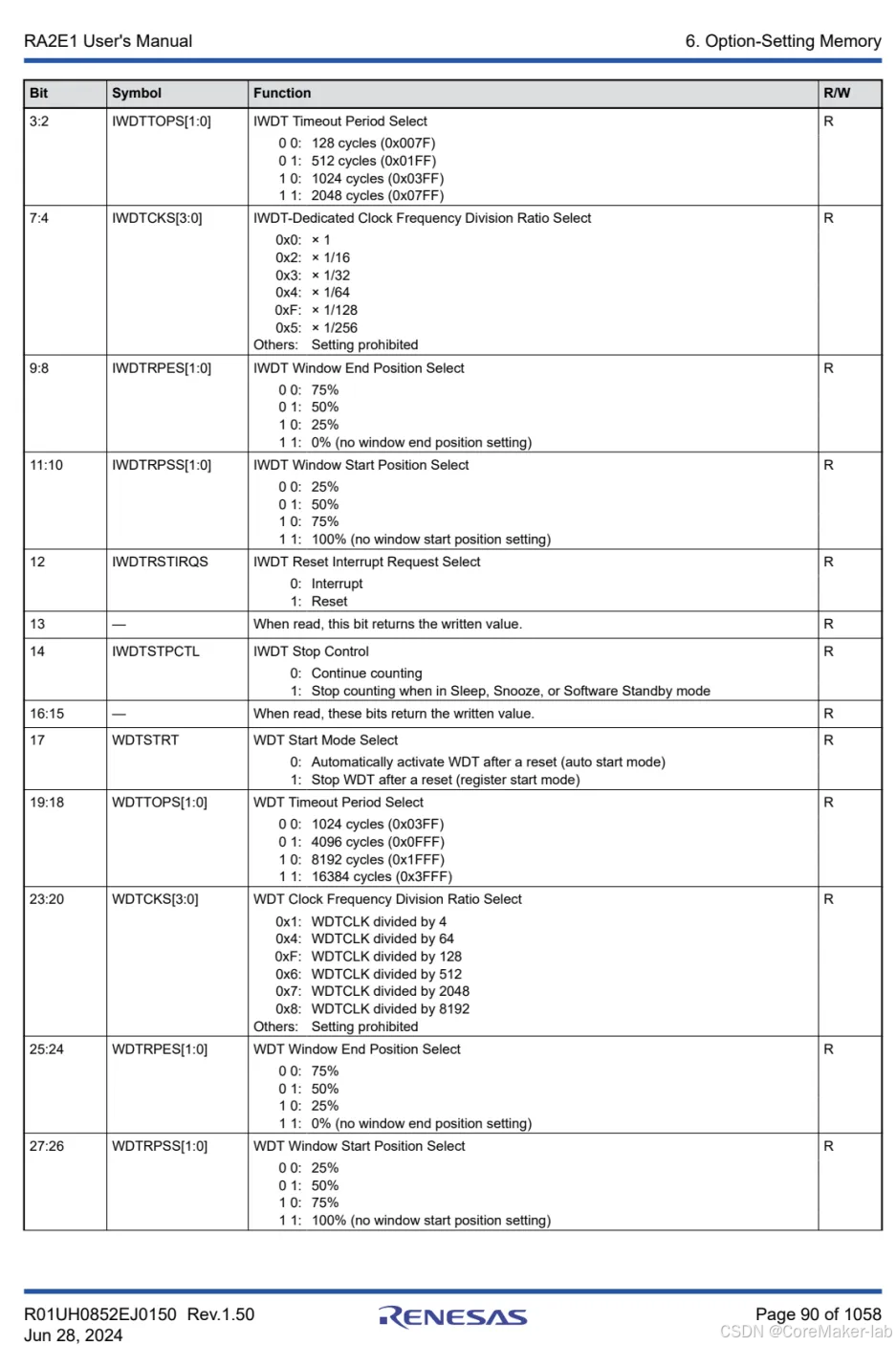
属性配置如下所示。
R_IWDT_Open()函数原型
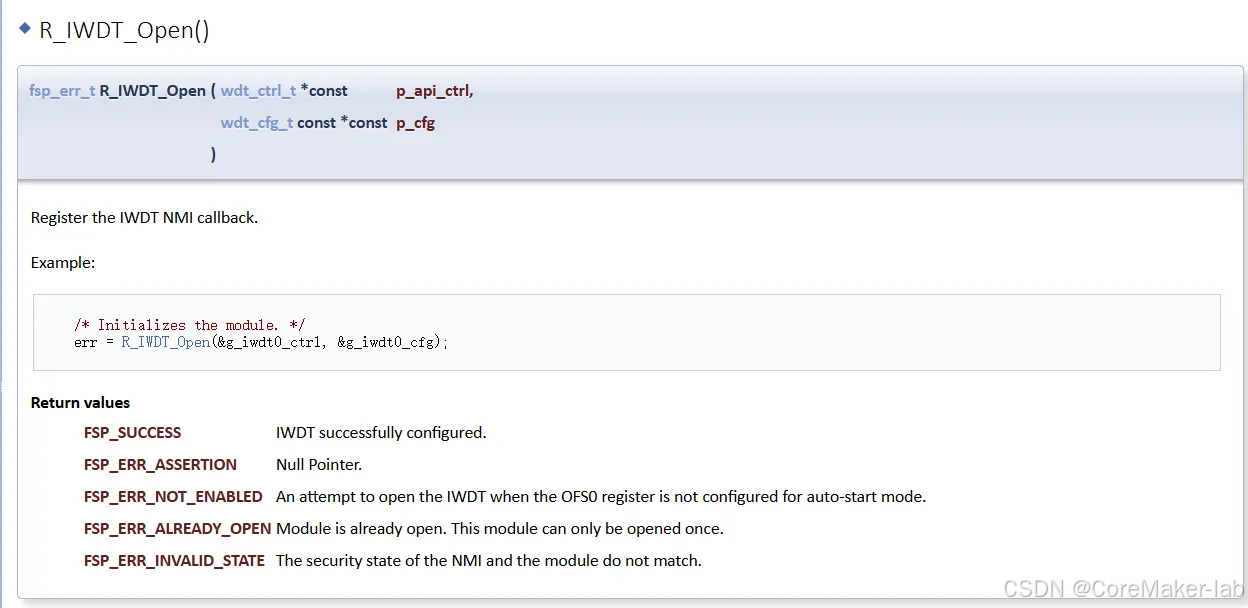
可以用R_IWDT_Open()函数进行初始化和开启IWDT。
/* Initializes the module. */
err = R_IWDT_Open(&g_wdt0_ctrl, &g_wdt0_cfg);
R_IWDT_Refresh()函数原型
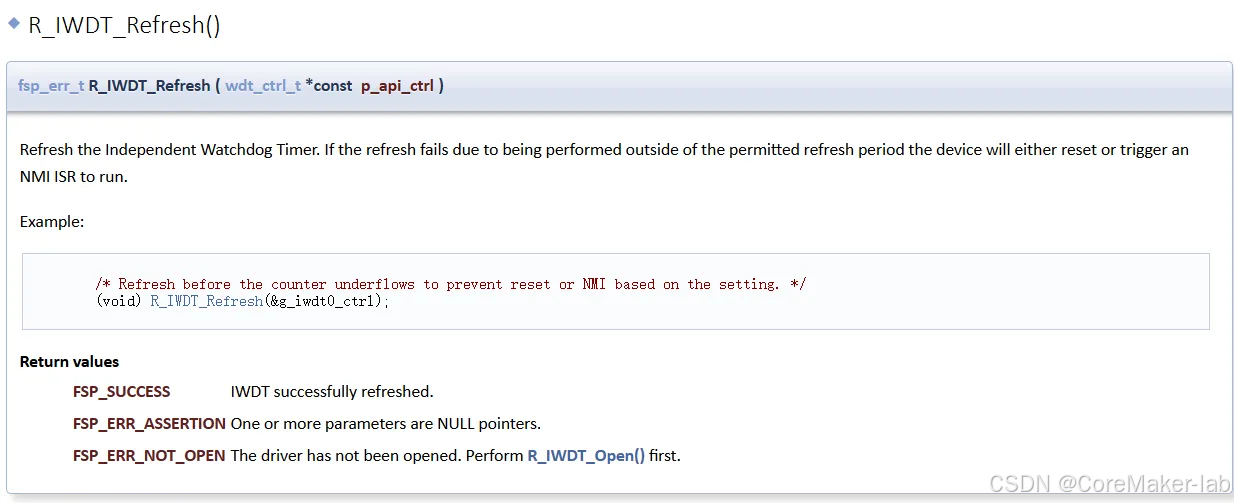
故可以用R_IWDT_Refresh()函数进行喂狗操作。
/* Refresh before the counter underflows to prevent reset or NMI based on the setting. */
(void) R_IWDT_Refresh(&g_wdt0_ctrl);
R_IWDT_CounterGet()函数原型

可以用R_IWDT_CounterGet()函数获取当前的计数值。
/* Read the current IWDT counter value. */
err = R_IWDT_CounterGet(&g_wdt0_ctrl, &iwdt_counter);
assert(FSP_SUCCESS == err);
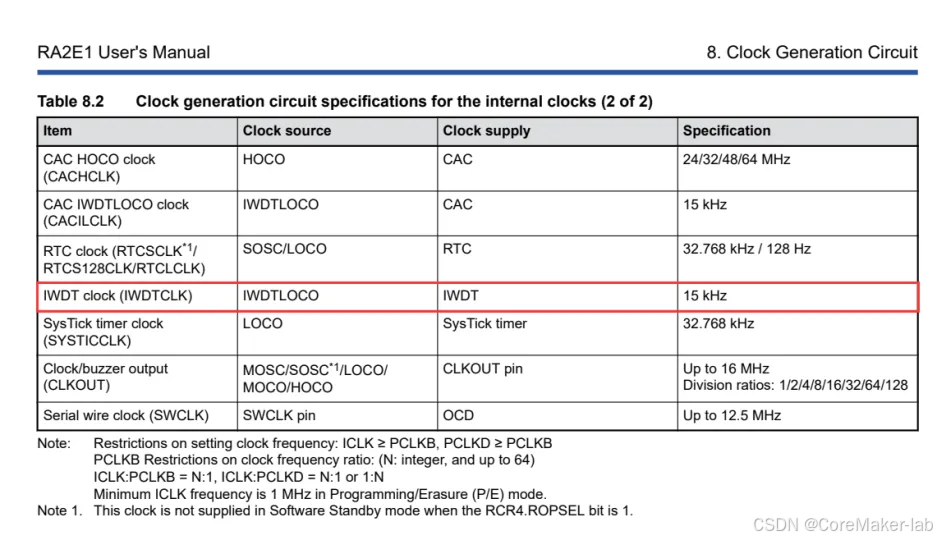
IWDT周期设定
独立看门狗定时器(IWDT)的时钟源为(IWDTCLK)。
这种设计确保看门狗使用的是独立于主时钟的时钟源,即使主时钟停止工作,看门狗仍然能正常运行,从而提供更高的可靠性。
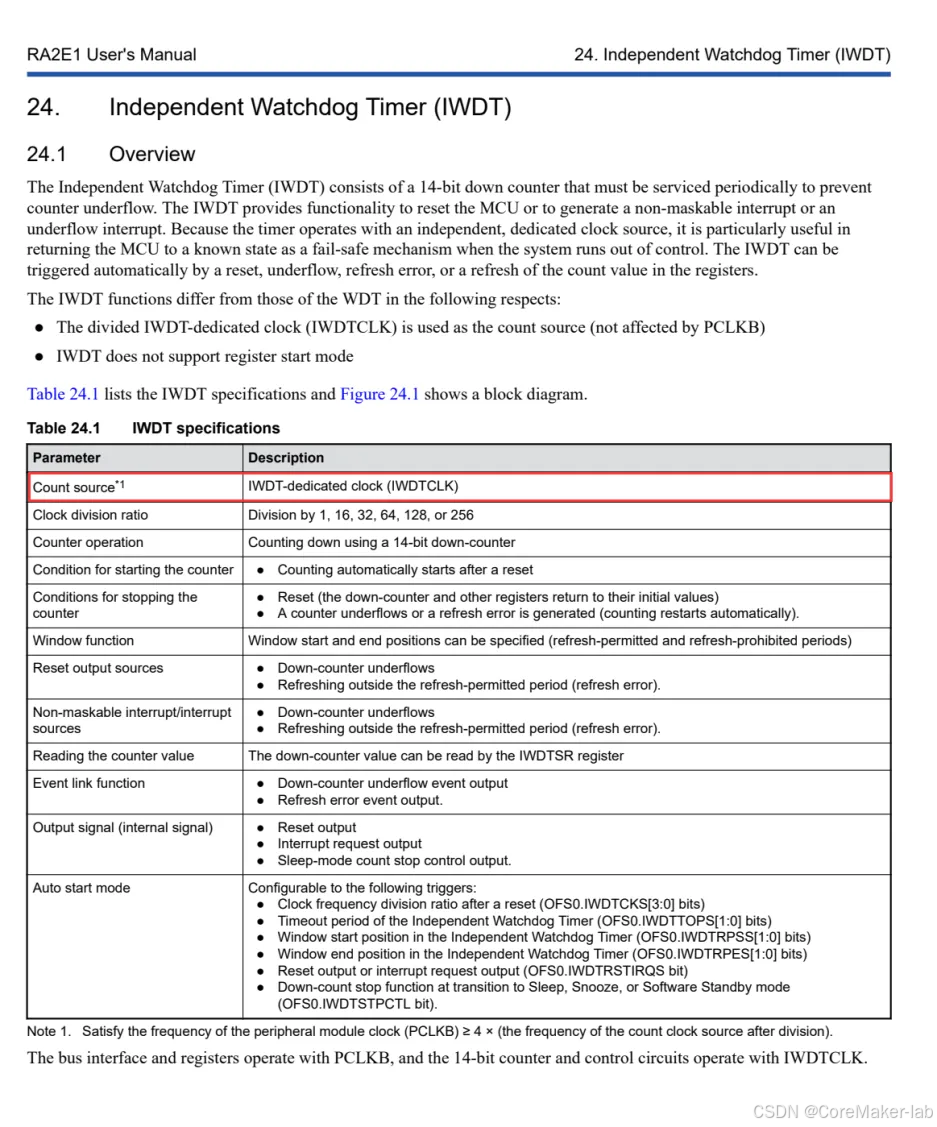
IWDTCLK频率为15k。
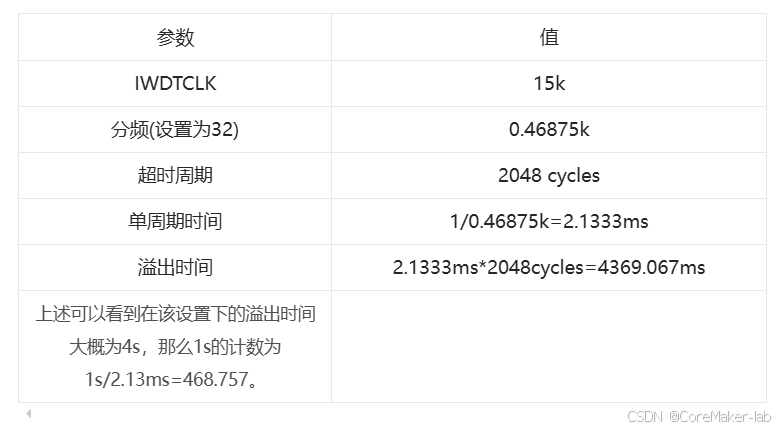
依据上文的设定,IWDT周期如下所示。
IWDT计数周期
IWDT 开始从 100% 计数到 0%,形成一个倒计时。
在允许刷新阶段,通过刷新信号将计数器值恢复到初始值,防止计数器溢出。

J-Link调试器的限制
当使用 J-Link 调试器时,IWDT 计数器不会运行(暂停计数)。
这意味着 IWDT 不会触发设备复位(reset)或生成非屏蔽中断(NMI)。
如果你希望在调试期间仍然让 IWDT 正常计数并能触发复位或中断,你需要添加以下代码 。
/* (Optional) Enable the IWDT to count and generate NMI or reset when the
* debugger is connected. */
R_DEBUG->DBGSTOPCR_b.DBGSTOP_IWDT = 0;
主程序
while(1)
{
if(rtc_flag)
{
uint32_t iwdt_counter = 0U;
/* Read the current IWDT counter value. */
err = R_IWDT_CounterGet(&g_wdt0_ctrl, &iwdt_counter);
assert(FSP_SUCCESS == err);
printf("iwdt_counter=%d\n",iwdt_counter);
/* Refresh before the counter underflows to prevent reset or NMI. */
(void) R_IWDT_Refresh(&g_wdt0_ctrl);
rtc_flag=0;
}
}
演示效果
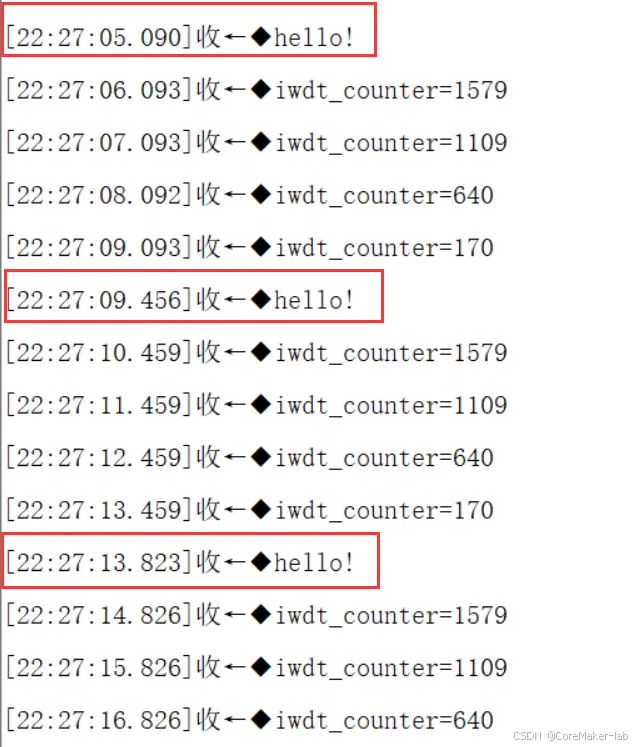
设置每过1s打印一次当前时间,分别设置喂狗和不喂狗,结果如下。
延迟1s的计数为1s/2.13ms=468.757,打印为1579,由于是向下计数,2048-469=1579,符合计算值。
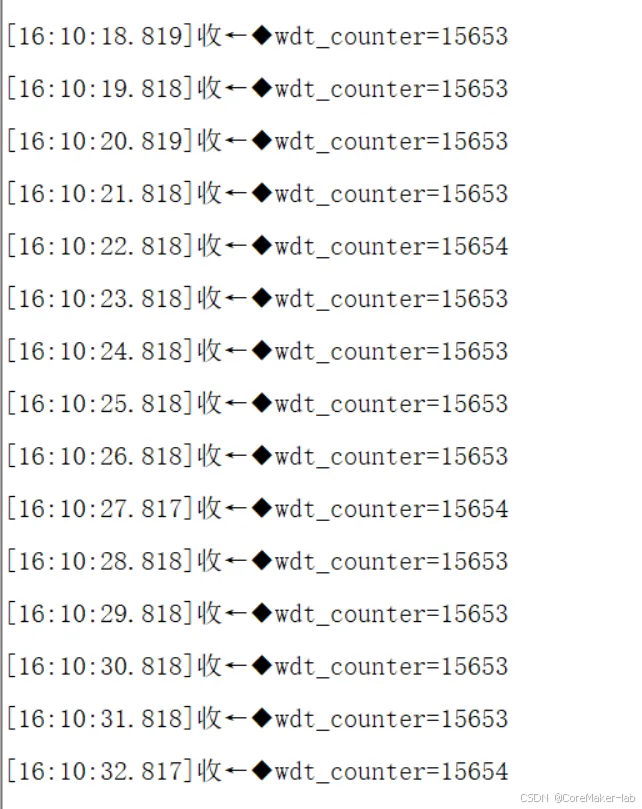
当不执行喂狗时候,计数值到0时会进行复位,2个复位之间为4s左右,符合计算的4369.067ms。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









