







map定义
map是一种key-value键值对的存储结构,其中key是不能重复的,其底层实现采用的是hash表。
map的数据结构
首先我们先列出源码结构关键字段,实现在 src/runtime/map.go:
type hmap struct {
count int // 元素的个数
B uint8 // buckets 数组的长度就是 2^B 个
overflow uint16 // 溢出桶的数量
buckets unsafe.Pointer // 2^B个桶对应的数组指针
oldbuckets unsafe.Pointer // 发生扩容时,记录扩容前的buckets数组指针
extra *mapextra //用于保存溢出桶的地址
}
type mapextra struct {
overflow *[]*bmap
oldoverflow *[]*bmap
nextOverflow *bmap
}
type bmap struct {
tophash [bucketCnt]uint8
}
//在编译期间会产生新的结构体
type bmap struct {
tophash [8]uint8 //存储哈希值的高8位
data byte[1] //key value数据:key/key/key/.../value/value/value...
overflow *bmap //溢出bucket的地址
}
为了便于理解源码的结构,我们提炼关键字段并转换为图形模式:
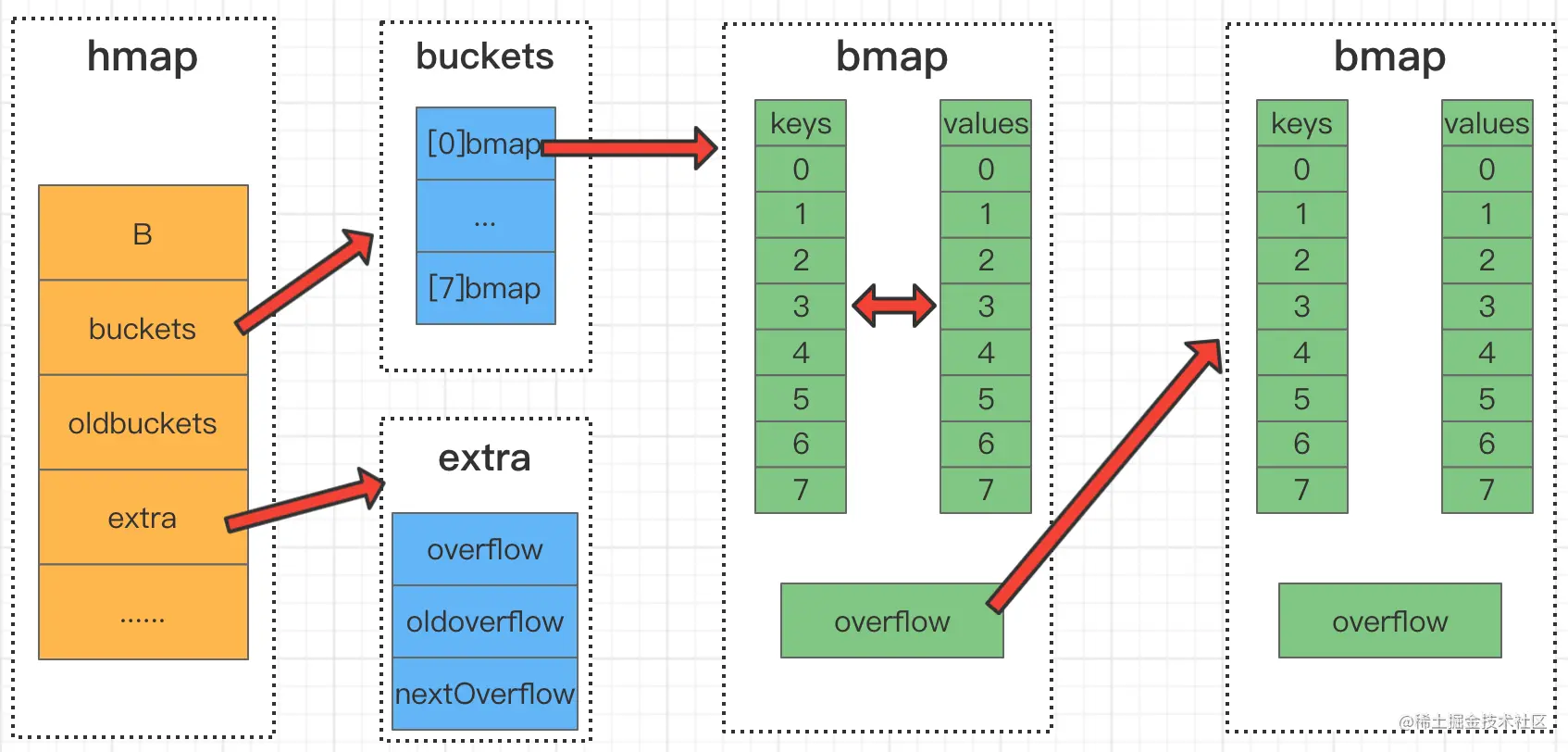
在go的map实现中,它的底层结构体是hmap,hmap里维护着若干个bucket数组 (即桶数组)。
Bucket数组中每个元素都是bmap结构,也即每个bucket(桶)都是bmap结构,【ps:后文为了语义一致,和方便理解,就不再提bmap了,统一叫作桶】 每个桶中保存了8个kv对,如果8个满了,又来了一个key落在了这个桶里,会使用overflow连接下一个桶(溢出桶)。
map中数据操作
了解了map的数据结构后,下面让我们学习一下在map中存取数据的过程:
GET获取数据
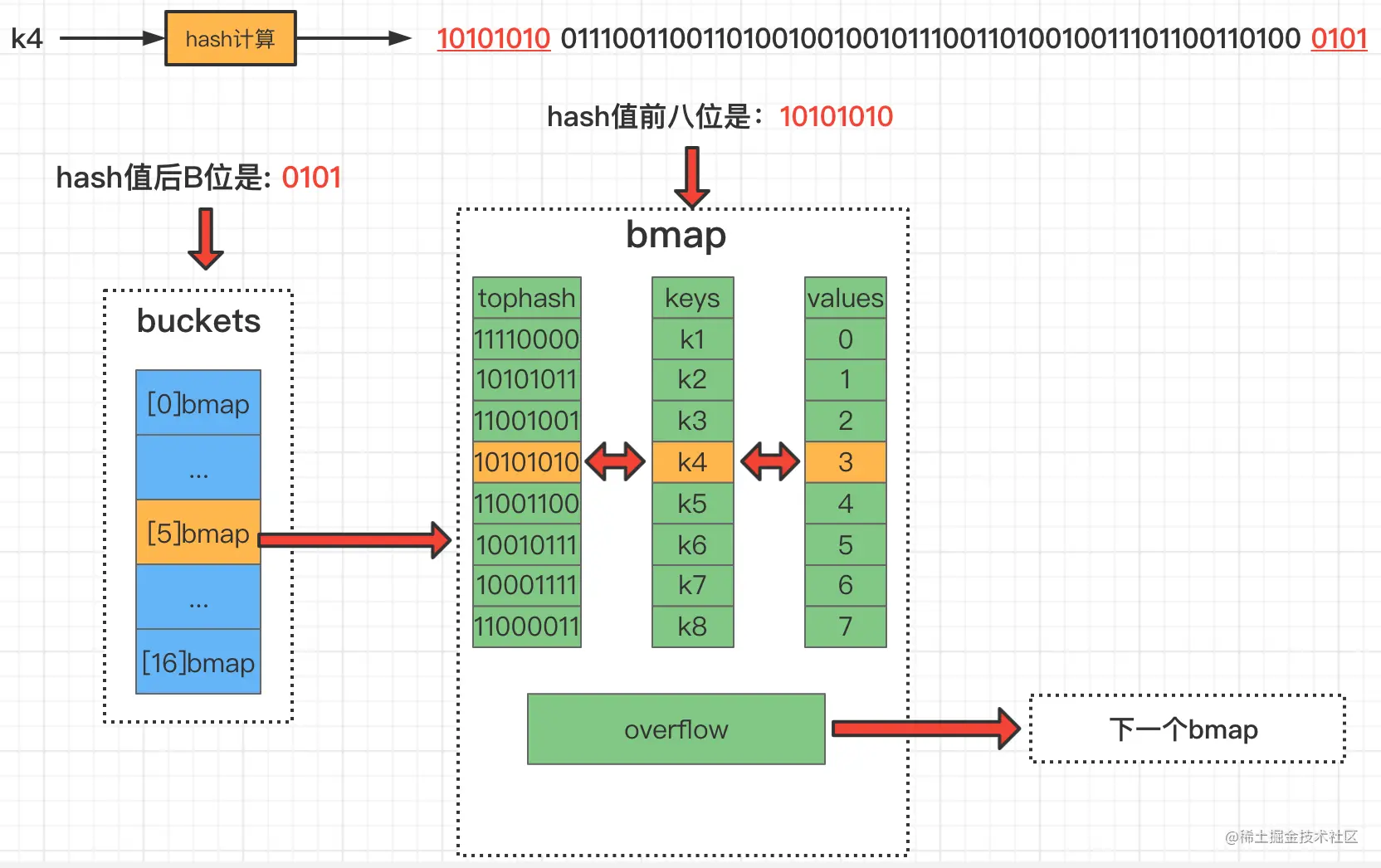
假设当前 B=4 即桶数量为2^B=16个,要从map中获取k4对应的value
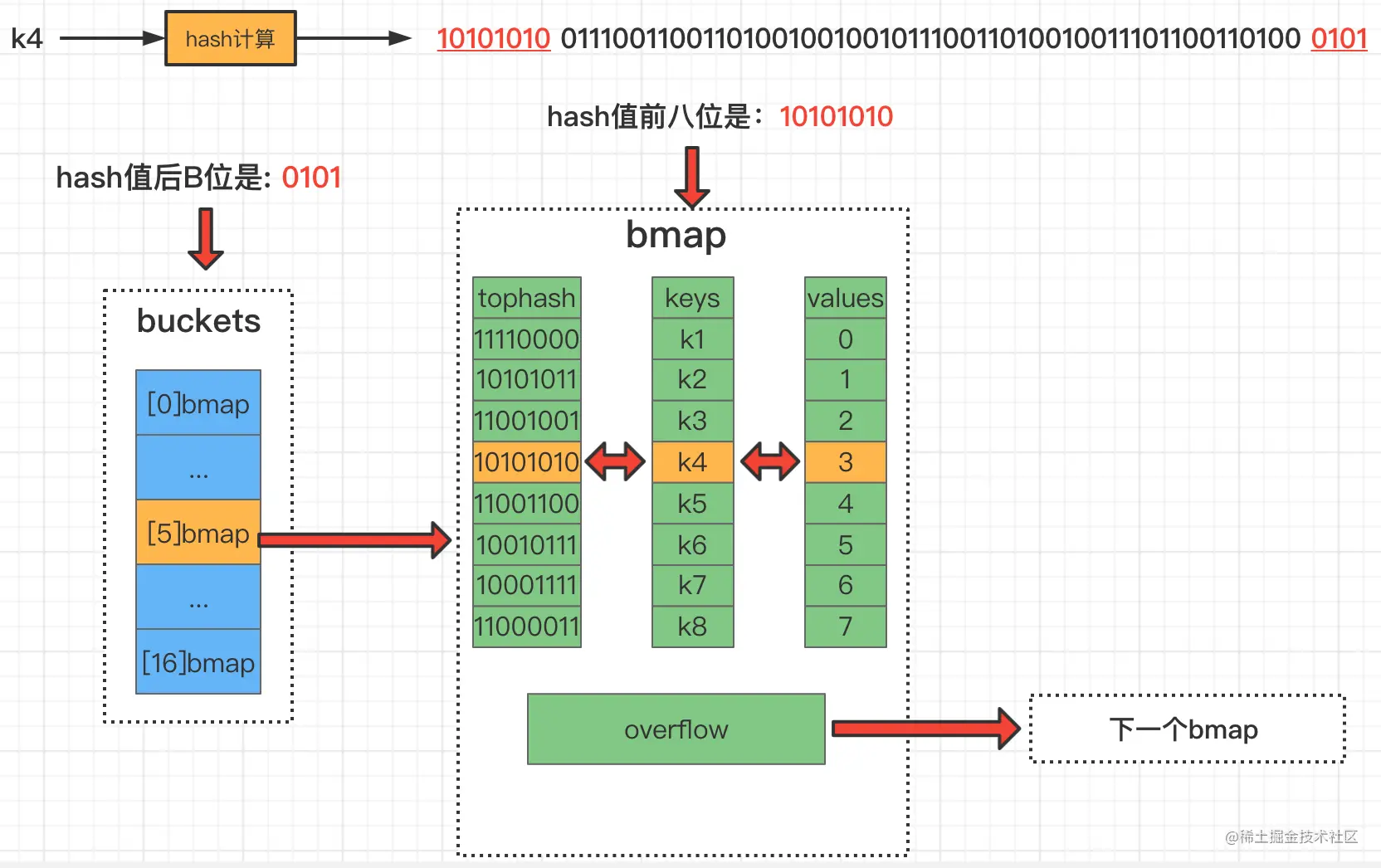
参考上图,k4的get流程可以归纳为如下几步:
①计算k4的hash值。[由于当前主流机都是64位操作系统,所以计算结果有64个比特位]
②通过最后的“B”位来确定在哪号桶,此时B为4,所以取k4对应哈希值的后4位,也就是0101,0101用十进制表示为5,所以在5号桶)
③根据k4对应的hash值前8位快速确定是在这个桶的哪个位置(额外说明一下,在bmap中存放了每个key对应的tophash,是key的哈希值前8位),一旦发现前8位一致,则会执行下一步
④对比key完整的hash是否匹配,如果匹配则获取对应value
⑤如果都没有找到,就去连接的下一个溢出桶中找
有很多同学会问这里为什么要多维护一个tophash,即hash前8位?
这是因为tophash可以快速确定key是否正确,也可以把它理解成一种缓存措施,如果前8位都不对了,后面就没有必要比较了。
PUT存放数据
map的赋值流程可总结位如下几步:
①通过key的hash值后“B”位确定是哪一个桶,图中示例为4号桶。
② 遍历当前桶,通过key的tophash和hash值,防止key重复,然后找到第一个可以插入的位置,即空位置处存储数据。
③如果当前桶元素已满,会通过overflow链接创建一个新的桶,来存储数据。
关于hash冲突:当两个不同的 key 落在同一个桶中,就是发生了哈希冲突。冲突的解决手段是采用链表法:在 桶 中,从前往后找到第一个空位进行插入。如果8个kv满了,那么当前桶就会连接到下一个溢出桶(bmap)。
扩容
扩容的方式
- 相同容量扩容
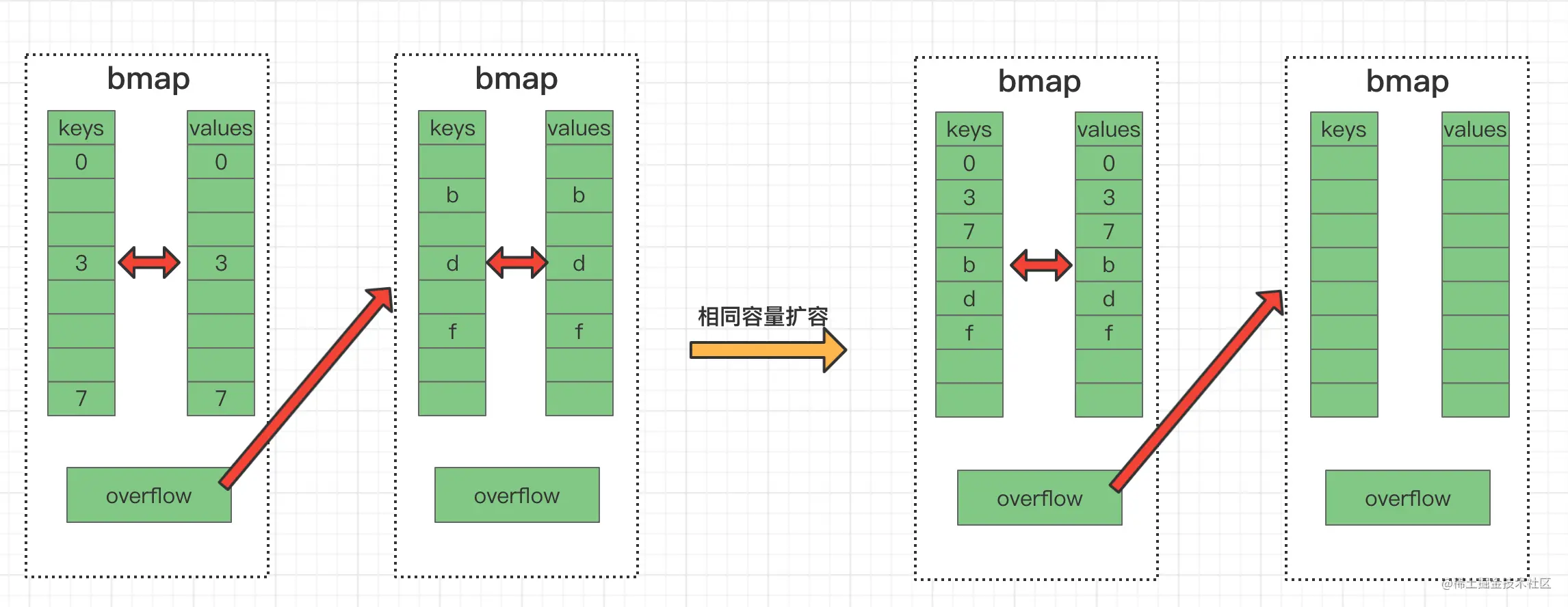
由于map中不断的put和delete key,桶中可能会出现很多断断续续的空位,这些空位会导致连接的bmap溢出桶很长,导致扫描时间边长。这种扩容实际上是一种整理,把后置位的数据整理到前面。这种情况下,元素会发生重排,但不会换桶。
- 2倍容量扩容
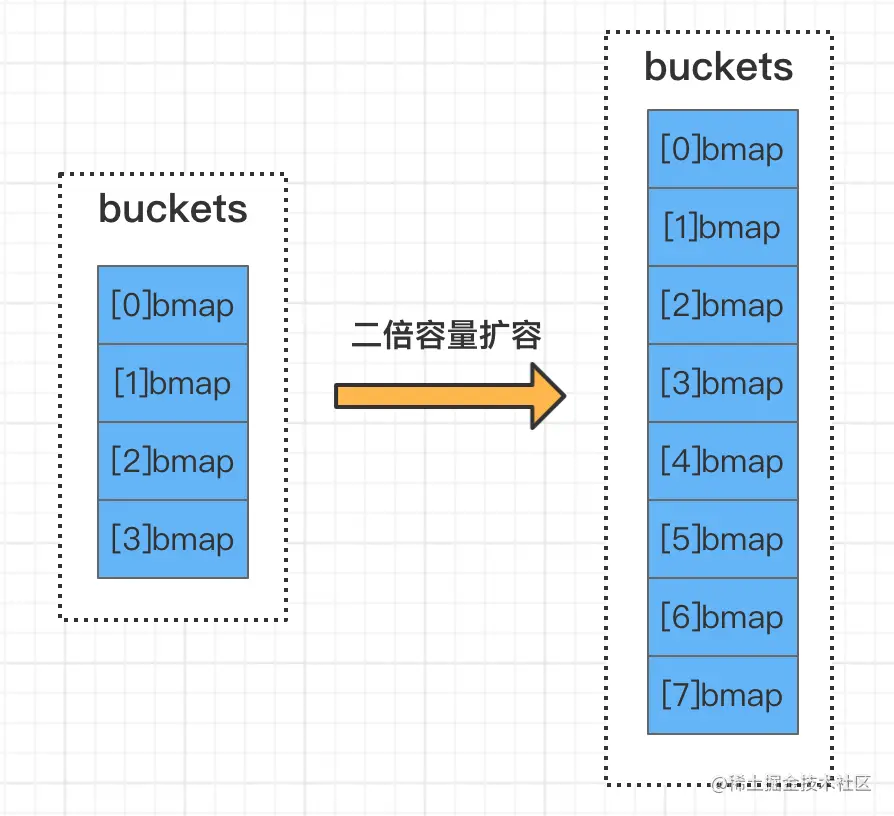
这种2倍扩容是由于当前桶数组确实不够用了,发生这种扩容时,元素会重排,可能会发生桶迁移。
如图中所示,扩容前B=2,扩容后B=3,假设一元素key的hash值后三位为101,那么由上文的介绍可知,在扩容前,由hash值的后两位来决定几号桶,即 01 所以元素在1号桶。 在扩容发生后,由hash值得后三位来决定几号桶,即101所以元素会迁移到5号桶。
扩容的条件
首先我们了解下**装载因子(loadFactor)**的概念
loadFactor:=count / (2^B) 即 装载因子 = map中元素的个数 / map中当前桶的个数
通过计算公式我们可以得知,装载因子是指当前map中,每个桶中的平均元素个数。
扩容条件1:**装载因子 > 6.5 **(源码中定义的)
这个也非常容易理解,正常情况下,如果没有溢出桶,那么一个桶中最多有8个元素,当平均每个桶中的数据超过了6.5个,那就意味着当前容量要不足了,发生扩容。
扩容条件2: 溢出桶的数量过多
当 B < 15 时,如果overflow的bucket数量超过 2^B。
当 B >= 15 时,overflow的bucket数量超过 2^15。
简单来讲,新加入key的hash值后B位都一样,使得个别桶一直在插入新数据,进而导致它的溢出桶链条越来越长。如此一来,当map在操作数据时,扫描速度就会变得很慢。及时的扩容,可以对这些元素进行重排,使元素在桶的位置更平均一些。
扩容时的细节
- 在我们的hmap结构中有一个oldbuckets吗,扩容刚发生时,会先将老数据存到这个里面。
- 每次对map进行删改操作时,会触发从oldbucket中迁移到bucket的操作【非一次性,分多次】
- 在扩容没有完全迁移完成之前,每次get或者put遍历数据时,都会先遍历oldbuckets,然后再遍历buckets。
注意事项
-
对map数据进行操作时不可取地址。常见的错误用例如下:
type Student struct { Name string Age int } func f1() { m := map[int]Student{ 1: Student{Age: 15, Name: "jack"}, 2: Student{Age: 16, Name: "danny"}, 3: Student{Age: 17, Name: "andy"}, } m[1].Name = "JACK" }这种情况会发生编译错误,因为map元素是无法取址的,也就是说,你可以得到m[1],但是无法对它的值作出任何修改。如果你想修改value,可以使用带指针的value,如下:
func f2() { m := map[int]*Student{ 1: &Student{Age: 15, Name: "jack"}, 2: &Student{Age: 16, Name: "danny"}, 3: &Student{Age: 17, Name: "andy"}, } m[1].Name = "JACK" }不知道各位道友有没有疑惑,为什么go中要禁止对map的元素进行取址呢?这是因为map 会随着元素数量的增长而重新分配更大的内存空间,会导致之前的地址无效。
type Resource struct {
sync.RWMutex
m map[string]int
}
func main() {
r := Resource{m: make(map[string]int)}
go func() { //开一个goroutine写map
for j := 0; j < 100; j++ {
r.Lock()
r.m[fmt.Sprintf("resource_%d", j)] = j
r.Unlock()
}
}()
go func() { //开一个goroutine读map
for j := 0; j < 100; j++ {
r.RLock()
fmt.Println(r.m[fmt.Sprintf("resource_%d", j)])
r.RUnlock()
}
}()
}

















 1093
1093

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









