






1. 问题的提出
在设计机器人结构时,我们常常会用到舵机,作为旭日x3派“首百尝鲜”活动的试用者,本次实验我准备用旭日x3派控制一台舵机,为了方便读者了解实验的设计意图,下面先提出几个基本问题以供讨论:
(1)什么是舵机?舵机是一种能够按照指定角度转动的电动执行器。
(2)舵机的结构?舵机一般由马达、减速齿轮组、电位器和控制电路组成。
(3)怎样控制舵机动作?给舵机提供一个特定的PWM信号,舵机就可以旋转到指定的位置。
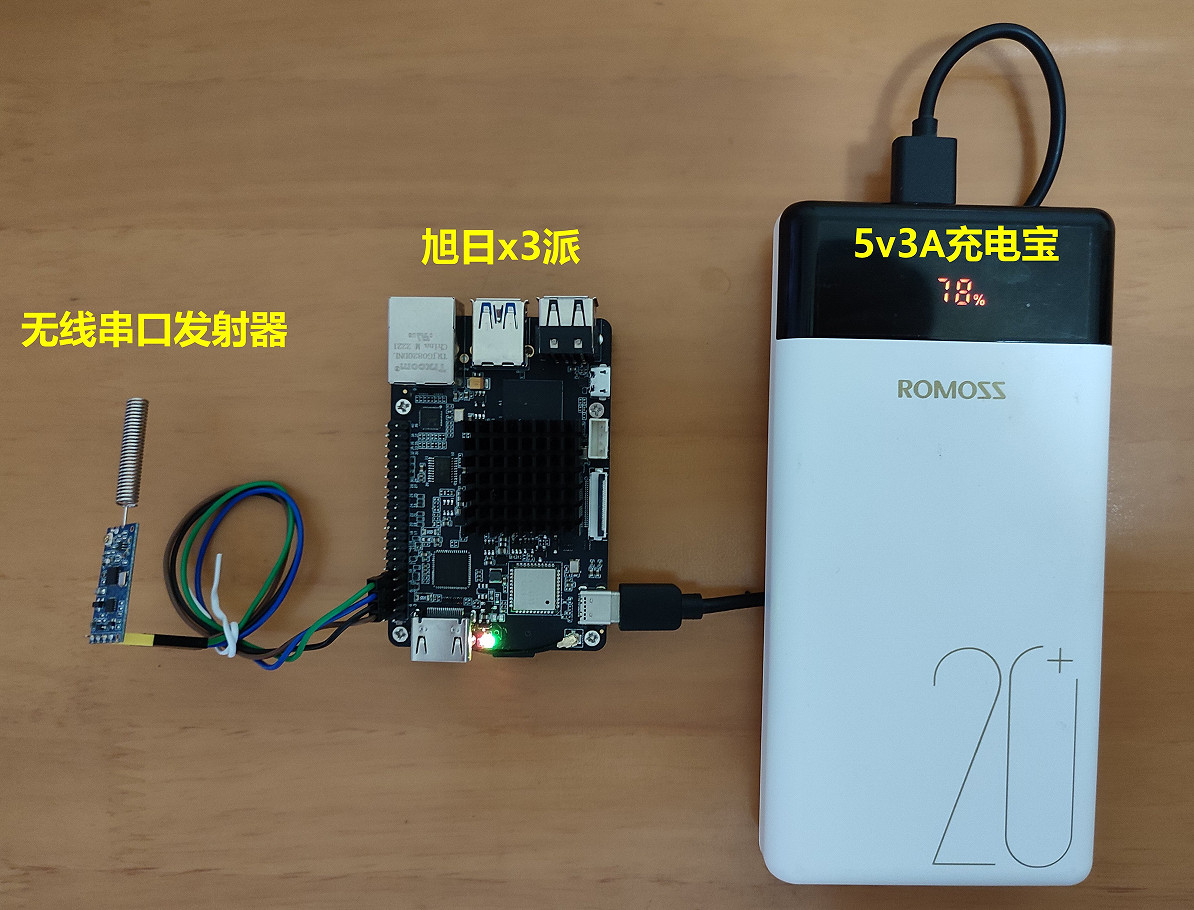
(4)怎样用旭日x3派远程控制一台舵机?旭日x3派本身有两个PWM脉冲信号端口(32、33),受限于供电电流,一般不建议直接控制舵机,所以我们需要借助MCU驱动舵机运动,而旭日派的任务就是给MCU发送指令,通常我们想到的就是通过串口(旭日派UART3的14、15端口)发送指令,仅仅为了串口硬线连接而把旭日派与MCU“绑定”到一起,倒不如通过无线串口通讯方便实用,所以本文准备探索通过无线串口通信控制一台舵机。
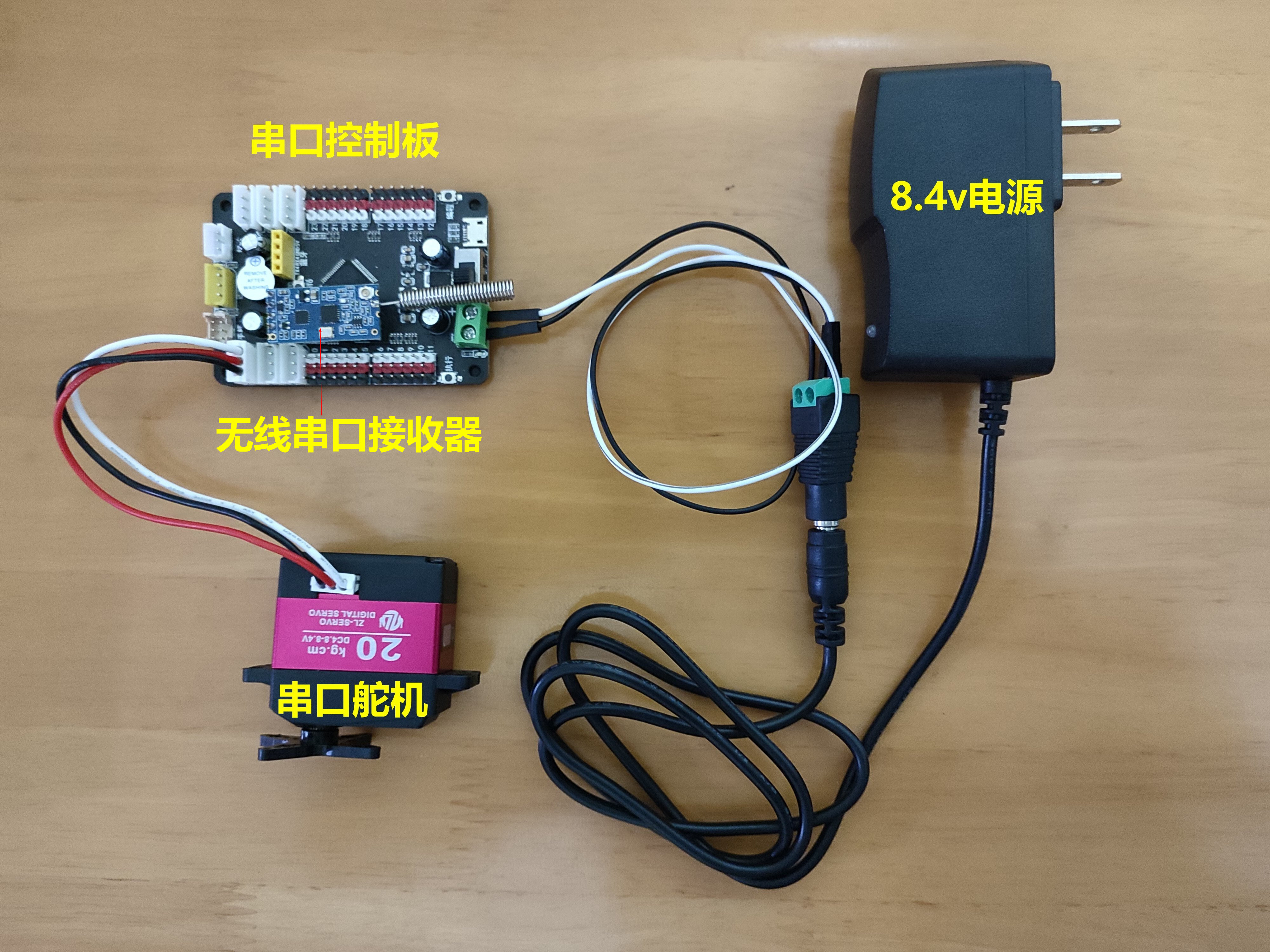
(5)有没有具体方案?如果采用普通舵机,还要考虑MCU的编程,为了简化起见,采用UART串行总线舵机,只需要向舵机控制板发送指令,舵机就会按照指定角度旋转,这样就大大简化了编程。对于无线串口部分,我们采用无线发送接收模块实现。
2. 总体方案
具体方案如下图所示,笔记本电脑通过wifi(SSH无线网络ip地址)连接并登陆旭日x3派,实现笔记本端到旭日派端的无线连接,旭日x3派与串口控制板采用无线串口收发器,实现旭日派与MCU控制板之间无线传递“信息”。
3. 控制编程
下面借鉴了官方python例程,并做了修改:
#!/usr/bin/env python3
# coding = utf-8
import sys
import os
import time
import serial
import serial.tools.list_ports
def serialTest():
print("List of enabled UART:")
os.system('ls /dev/tty[a-zA-Z]*')
uart_dev= '/dev/ttyS3' #定义串口端口
baudrate = 115200 #波特率
val = 1500 #舵机初始位置(0位)
incr = 100 #舵机转位递增(减)步长
try:
ser = serial.Serial(uart_dev, int(baudrate), timeout=1) # 1s timeout
except Exception as e:
print("open serial failed!\n")
print(ser)
print("Starting demo now! Press CTRL+C to exit")
while True: #舵机一秒转位一次,到达限位后反转,往复转动
if val >= 2500: #高限位
incr = -incr
if val <= 0: #低限位
incr = -incr
val += incr
val1 = str(val) #转换成字符串
if val <= 1000:
test_data = '#000P'+'0'+val1+'T1000!'
#当val<1000时,前位自动补0,即:若val=500,则字符串为“0500”,实际发送字符串为:#000P0500T1000!
else:
test_data = '#000P'+val1+'T1000!'
write_num = ser.write(test_data.encode('UTF-8')) #发送到串口
print(test_data)
time.sleep(1)
ser.close()
return 0
if __name__ == '__main__':
if serialTest() != 0:
print("Serial test failed!")
else:
print("Serial test success!")4. 运行效果
在笔记本端运行MobaXterm,运行python程序,效果如图所示:
旭日x3派无线串口通信控制舵机
5. 挖坑时间
请旭友们帮帮忙,我的这篇文章里有一处错误和一处疑惑,帮我解答一下呗!
(1)电机转动到某个限位时,会停几秒,为什么?代码有哪里需要改进?
(2)笔记本不需要用串口线连接旭日x3派,开机直接用充电宝给旭日派插电,Ubuntu要做什么设置,MobaXterm又要采用什么连接方式?
本文转自地平线开发者社区
原作者:David988
原链接:https://developer.horizon.ai/forumDetail/106482341031035906
















 1043
1043











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









