






MATLAB/Simulink搭建电动助力转向模型,
视频操作说明
EPS模型,包括PID控制算法,传递函数回正控制,有完整的模型公式搭建过程,仿真结果
齿轮齿条转向器模型
方向盘模型
力矩传感器模型
助力电机模型等等
电动助力转向系统控制系统
电动助力转向系统被控系统
PID控制算法
控制策略
ID:7645658893907495
牡丹城幽默的草莓


标题:MATLAB Simulink中电动助力转向系统的建模与控制策略
摘要:本文基于MATLAB Simulink平台,详细介绍了如何搭建电动助力转向系统模型,并运用PID控制算法和传递函数回正控制策略进行系统控制。具体包括EPS模型、齿轮齿条转向器模型、方向盘模型、力矩传感器模型、助力电机模型等。通过仿真结果验证了该控制系统的有效性。
引言:电动助力转向系统在现代汽车中扮演着重要的角色,它能够提供良好的操控性和驾驶舒适性。为了实现优秀的转向性能,电动助力转向系统需要合理的建模和控制策略。本文基于MATLAB Simulink平台,详细解析了电动助力转向系统的建模过程,并探讨了PID控制算法和传递函数回正控制策略在转向系统中的应用。
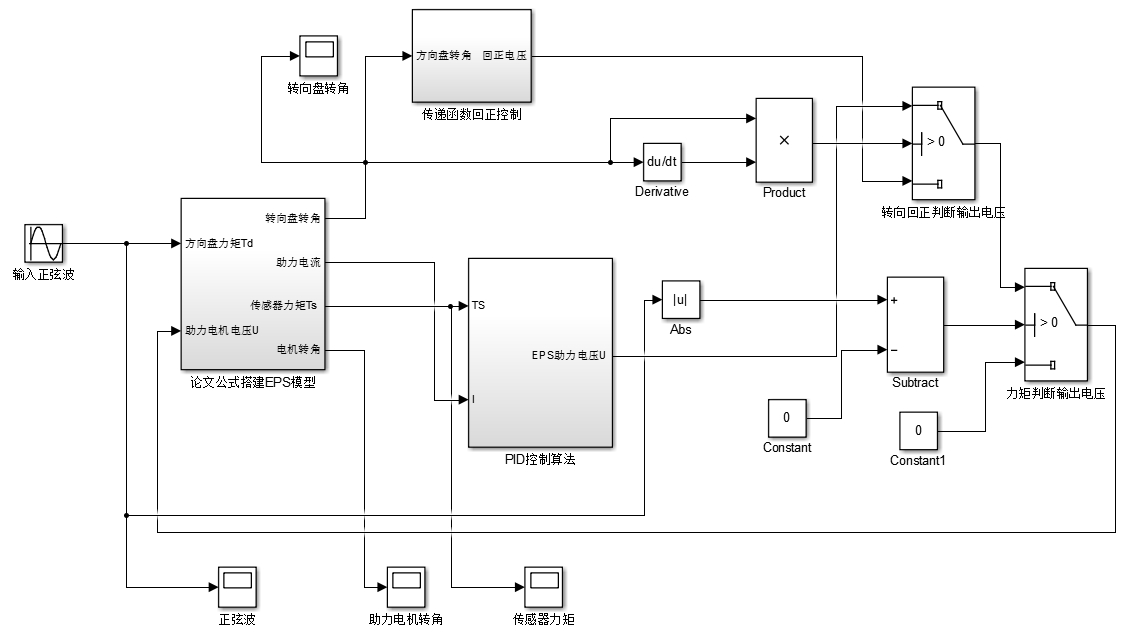
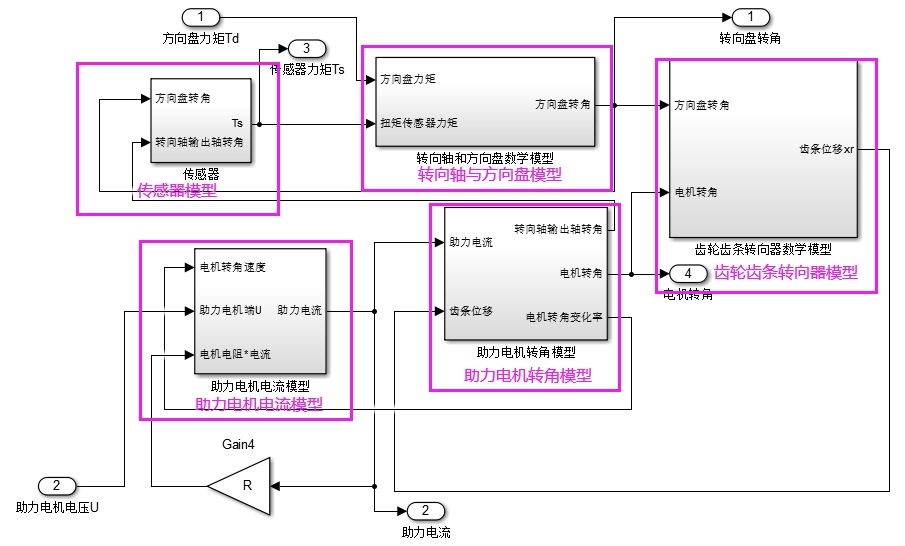
一、EPS模型搭建
为了模拟电动助力转向系统的工作原理,我们首先搭建了EPS模型。EPS模型包括齿轮齿条转向器模型、方向盘模型、力矩传感器模型以及助力电机模型等。其中,齿轮齿条转向器模型模拟了方向盘输入信号与转向角度的对应关系;方向盘模型模拟了驾驶员对方向盘的操控;力矩传感器模型模拟了驾驶员对方向盘施加的力矩信号;助力电机模型模拟了助力电机对转向系统的辅助力。
二、PID控制算法的应用
为了实现电动助力转向系统的准确控制,本文采用了PID控制算法。PID控制算法综合了比例、积分和微分三个控制参数,通过对系统的误差、积分和变化率进行综合调节,实现了系统的精确控制。我们将PID控制算法应用于电动助力转向系统中,通过调节PID参数以及对误差信号的处理,达到了理想的转向性能。
三、传递函数回正控制策略的研究
除了PID控制算法,本文还研究了一种传递函数回正控制策略。传递函数回正控制策略通过对转向系统的传递函数进行建模,并根据传递函数的特性进行控制。我们将传递函数回正控制策略应用于电动助力转向系统中,通过对传递函数参数的调节,实现了对系统的精确控制。与PID控制算法相比,传递函数回正控制策略在某些场景下表现出更好的性能。
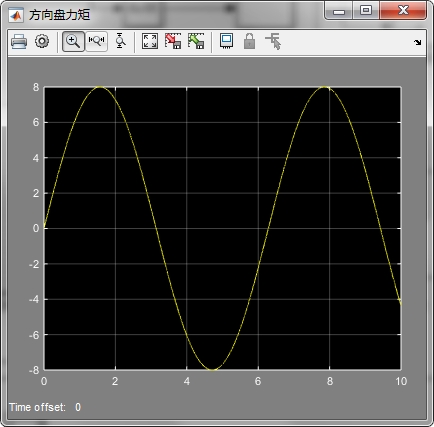
四、仿真结果与讨论
通过基于MATLAB Simulink的仿真实验,我们验证了所提出的电动助力转向系统控制策略的有效性。通过调整PID参数和传递函数参数,我们获得了理想的转向性能和响应速度。实验结果表明,在电动助力转向系统的建模和控制中,合理选择适当的控制策略能够提升系统的性能和稳定性。
结论:本文基于MATLAB Simulink平台详细介绍了电动助力转向系统的建模和控制策略。通过结合PID控制算法和传递函数回正控制策略,我们实现了对电动助力转向系统的准确控制。本文的研究成果可为电动助力转向系统的优化设计提供参考,并为汽车操控性能的提升提供了理论基础。
关键词:MATLAB Simulink、电动助力转向系统、模型建模、PID控制算法、传递函数回正控制、转向性能、控制策略
以上相关代码,程序地址:http://matup.cn/658893907495.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









