






FX3U和三菱伺服控制的框架标准程序,适合新手学习定位用。
用 标签分层,说明了定位控制中的公共参数设定、回原点、JOG手动、绝对定位、相对定位、控制等部分,有伺服驱动器的针脚接线。
‘包括有:
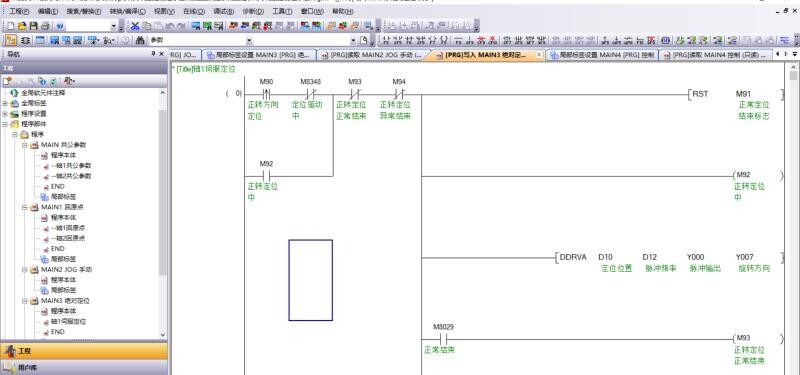
1、程序一份
2、说明一份
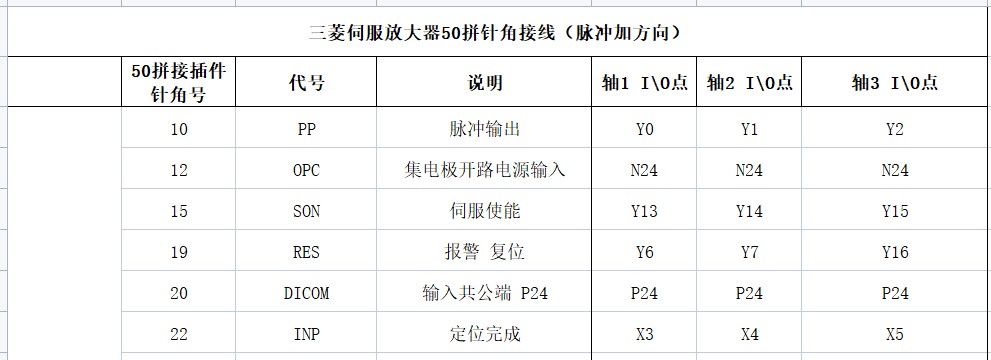
3、伺服驱动器接线针脚一份
YID:889645805568364
电气工程师科技
FX3U和三菱伺服控制的框架标准程序,适合新手学习定位用。在现代工业自动化领域,伺服控制技术被广泛应用于定位控制系统中。本篇文章将围绕FX3U和三菱伺服控制的框架标准程序展开,旨在为新手提供学习定位控制的基础知识和操作步骤。
首先,我们将从标签分层的角度对定位控制中的几个关键部分进行详细说明。其中包括公共参数设定、回原点、JOG手动、绝对定位、相对定位和控制等方面。通过在代码中使用合适的标签,可以使程序结构清晰、易于理解和维护。
在定位控制系统中,公共参数设定是非常重要的一步。通过设定合适的参数,可以确保后续的定位操作得到准确的控制。在FX3U和三菱伺服控制的框架标准程序中,我们提供了详细的说明和示例,包括速度、加速度、减速度等参数的设定方法。
回原点是定位控制中常用的操作之一,它可以使执行器返回到初始位置。在框架标准程序中,我们详细介绍了回原点的步骤和参数设定,以及常见的回原点模式和方法。通过学习和理解这些内容,新手可以快速掌握回原点操作的技巧和注意事项。
JOG手动是一种手动操作方式,可以通过外部输入设备控制执行器的移动。在本文中,我们将详细介绍JOG手动的使用方法和注意事项,帮助新手快速上手掌握这一功能。
绝对定位和相对定位是定位控制中常用的两种方式。在框架标准程序中,我们将详细解释它们的原理和操作方法,以及如何在程序中实现这些功能。通过学习这些内容,新手将能够灵活运用绝对定位和相对定位,实现精确的定位控制。
最后,我们将介绍伺服驱动器的接线针脚。伺服驱动器是定位控制系统中的核心部件之一,正确的接线可以保证系统正常工作。我们通过提供接线针脚的详细说明,帮助新手正确连接伺服驱动器,避免因接线错误导致的故障和损坏。
综上所述,FX3U和三菱伺服控制的框架标准程序是新手学习定位控制的理想选择。通过本文中的详细说明和示例,新手将能够快速了解定位控制的基本概念和操作步骤。同时,我们还提供了程序一份、说明一份和伺服驱动器接线针脚一份,方便读者进一步学习和实践。
通过学习定位控制,新手可以为工业自动化领域的发展做出贡献。定位控制技术的应用范围广泛,涉及到机械加工、自动化装配、机器人控制等多个领域。掌握定位控制的基本原理和操作方法,将帮助新手在工作中更好地应用这一技术,提高工作效率和质量。
总之,本文围绕FX3U和三菱伺服控制的框架标准程序展开了详细的介绍和说明。通过学习本文内容,读者将能够快速掌握定位控制的基本知识和操作步骤,并通过实践进一步提升自己的技术水平。我们希望通过这篇文章的发布,能够为广大程序员社区的读者带来实实在在的技术分析,帮助他们在工作中更好地应用定位控制技术。
相关的代码,程序地址如下:http://imgcs.cn/645805568364.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









