






enable_shared_from_this解析
enable_shared_from_this,是一个以其派生类为模板类型实参的基础模板,继承它,this指针就能变成shared_ptr。
什么时候该使用enable_shared_from_this模板类
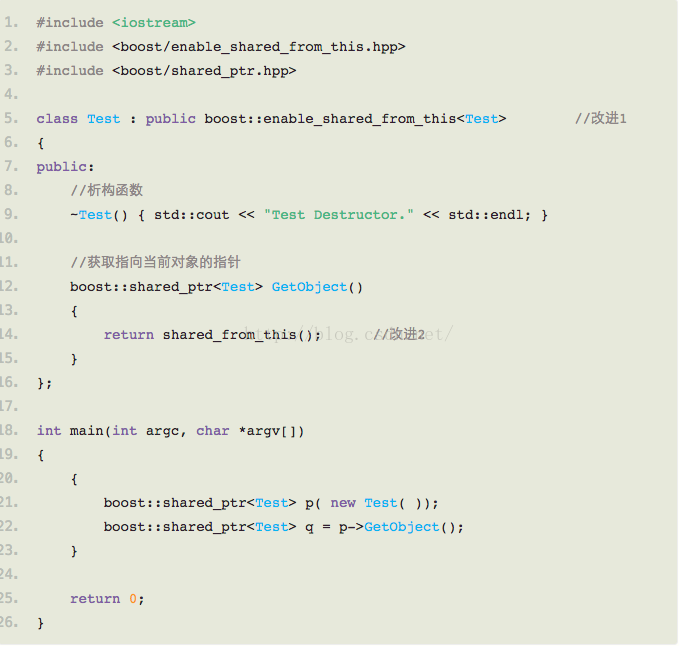
在看下面的例子之前,简单说下使用背景,单有一个类,某个函数需要返回当前对象的指针,我们返回的是shared_ptr,为什么使用智能指针呢,这是因为:当我们使用智能指针管理资源时,必须统一使用智能指针,而不能再某些地方使用智能指针,某些地方使用原始指针,否则不能保持智能指针的语义,从而产生各种错误。好了,介绍完背景,看下面的一段小程序:

程序输出:

从上面的输出你发现了什么,很明显的发现只创建new了一个Test对象,但是却调用了两次析构函数,这对程序来说肯定是一个灾难。为什么会出现这种情况呢?main函数中的boost::shared_ptr<Test> p( new Test( ));将shared_ptr中引用计数器的值设置为1,而在GetObject函数中又通过boost::shared_ptr<Test> pTest(this);又将shared_ptr中的引用计数器的值增加了1,故在析构时一个Test对象被析构了两次。即产生这个错误的原因是通过同一个Test指针对象创建了多个shared_ptr,这是绝对禁止的。同时这也提醒我们在使用shared_ptr时一定不能通过同一个指针对象创建一个以上的shared_ptr对象。那么有什么方法从一个类的成员函数中获取当前对象的shared_ptr呢,其实方法很简单:只需要该类继承至enable_shared_from_this模板类,然后在需要shared_prt的地方调用enable_shared_from_this模板类的成员函数shared_from_this()即可,下面是改进后的代码:
程序输出:

从输出对象只被析构了一次,这是我们想要的结果,因此enable_shared_from_this模板类的作用是:用来作为一个基类,它允许从一个成员函数中获得一个当前对象的shared_ptr。那么enable_shared_from_this模板类到底是如何工作的了?请看下文分解~
enable_shared_from_this模板类实现
打开enable_shared_from_this.hpp文件,会发现enable_shared_from_this模板类的实现如下:
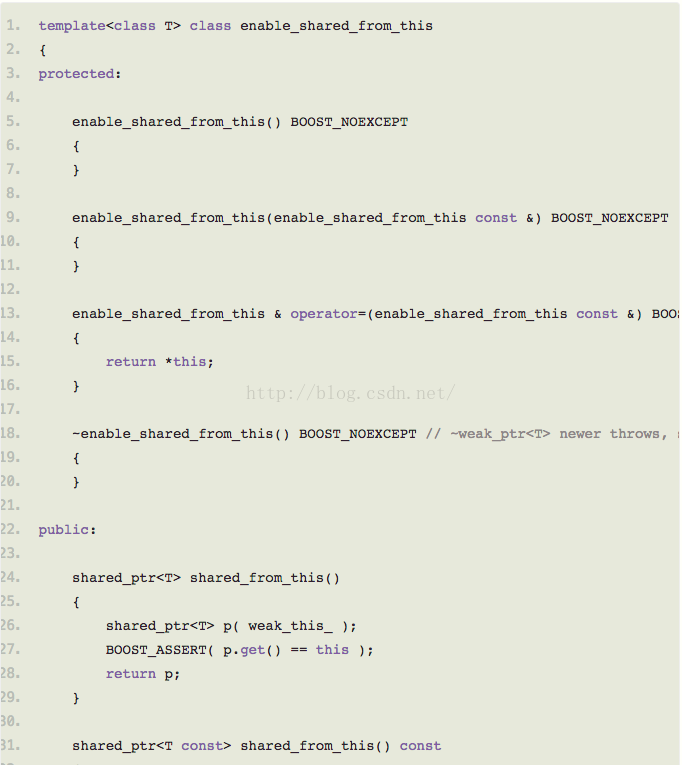
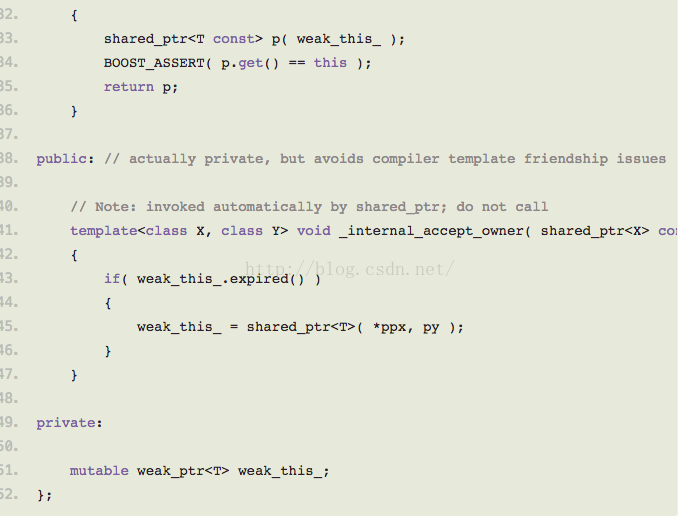
从enable_shared_from_this模板类的实现文件中我们可以很容易的发现我们只能使用返回shared_ptr的shared_from_this()和返回shared_ptr的shared_from_this(),因为这两个版本的shared_from_this()是public权限的,还有一个public权限的是internal_accept_owner函数,但是注释中已经明显指出不能调用这个函数,这个函数会被shared_ptr自动调用,internal_accept_owner函数用来初始化enable_shared_from_this模板类中的唯一成员变量weak_ptr weak_this。而shared_from_this()中是通过将weak_ptr weak_this转化成shared_ptr和shared_ptr来返回的,因此在使用shared_from_this()之前需要先初始化weak_ptr weak_this对象,而weak_ptr weak_this对象是在_internal_accept_owner函数中进行的初始化,也就是说先需要创建shared_ptr对象。即在使用shared_from_this()函数之前,应该先初始化对象的基类enable_shared_from_this,接着再初始化对象,最后初始化shared_ptr。正因为有这个特点所以会出现以下常见的错误:
使用enable_shared_from_this常见错误
先来看情形1:

这种用法明显是错的,虽然对象的基类enable_shared_from_this类的构造函数已经被调用,但是shared_ptr的构造函数并没有被调用,因此weak_ptr weak_this_并没有被初始化,所以这时调用shared_from_this()是错误的。
接着我们来看情形2:
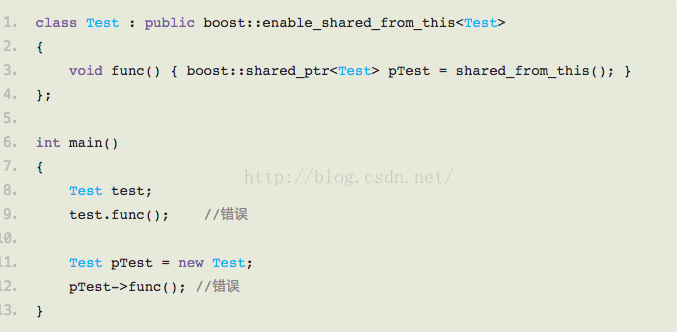
同样这种做法也是错误的,和情形1同样的原因shared_ptr的构造函数并没有被调用,因此weak_ptr weak_this_并没有被初始化。
正确的做法应该是:

shared_ptr<Test> pTest( new Test() );这句话依次执行的顺序是:1 调用enable_shared_from_this的构造函数。2 调用Test的构造函数。 3 调用shared_ptr的构造函数初始化weak_ptr weak_this_。最后才能通过func()函数使用shared_from_this函数。
从上面的错误中我们知道在使用enable_shared_from_this类中的shared_from_this()函数时应该注意:
1. 不能在对象的构造函数中使用shared_from_this()函数。
2. 先需要调用enable_shared_from_this类的构造函数,接着调用对象的构造函数,最后需要调用shared_ptr类的构造函数初始化enable_shared_from_this的成员变量weak_this_。然后才能使用shared_from_this()函数。
3. 如何程序中使用了智能指针shared_ptr,则程序中统一使用智能指针,不能使用原始指针,以免出现错误。
示例
下面给出一个例子:
-
<span style="background-color: rgb(255, 255, 255);">// -
// server.cpp -
// ~~~~~~~~~~ -
// -
// Copyright (c) 2003-2008 Christopher M. Kohlhoff (chris at kohlhoff dot com) -
// -
// Distributed under the Boost Software License, Version 1.0. (See accompanying -
// file LICENSE_1_0.txt or copy at http://www.boost.org/LICENSE_1_0.txt) -
// -
#include <ctime> -
#include <iostream> -
#include <string> -
#include <boost/bind.hpp> -
#include <boost/shared_ptr.hpp> -
#include <boost/enable_shared_from_this.hpp> -
#include <boost/asio.hpp> -
using boost::asio::ip::tcp; -
std::string make_daytime_string() -
{ -
using namespace std; // For time_t, time and ctime; -
time_t now = time(0); -
return ctime(&now); -
} -
class tcp_connection -
: public boost::enable_shared_from_this<tcp_connection> -
{ -
public: -
typedef boost::shared_ptr<tcp_connection> pointer; -
static pointer create(boost::asio::io_service& io_service) -
{ -
return pointer(new tcp_connection(io_service)); -
} -
tcp::socket& socket() -
{ -
return socket_; -
} -
void start() -
{ -
message_ = make_daytime_string(); -
boost::asio::async_write(socket_, boost::asio::buffer(message_), -
boost::bind(&tcp_connection::handle_write, shared_from_this(), -
boost::asio::placeholders::error, -
boost::asio::placeholders::bytes_transferred)); -
} -
private: -
tcp_connection(boost::asio::io_service& io_service) -
: socket_(io_service) -
{ -
} -
void handle_write(const boost::system::error_code& /*error*/, -
size_t /*bytes_transferred*/) -
{ -
} -
tcp::socket socket_; -
std::string message_; -
}; -
class tcp_server -
{ -
public: -
tcp_server(boost::asio::io_service& io_service) -
: acceptor_(io_service, tcp::endpoint(tcp::v4(), 13)) -
{ -
start_accept(); -
} -
private: -
void start_accept() -
{ -
tcp_connection::pointer new_connection = -
tcp_connection::create(acceptor_.io_service()); -
acceptor_.async_accept(new_connection->socket(), -
boost::bind(&tcp_server::handle_accept, this, new_connection, -
boost::asio::placeholders::error)); -
} -
void handle_accept(tcp_connection::pointer new_connection, -
const boost::system::error_code& error) -
{ -
if (!error) -
{ -
new_connection->start(); -
start_accept(); -
} -
} -
tcp::acceptor acceptor_; -
}; -
int main() -
{ -
try -
{ -
boost::asio::io_service io_service; -
tcp_server server(io_service); -
io_service.run(); -
} -
catch (std::exception& e) -
{ -
std::cerr << e.what() << std::endl; -
} -
return 0; -
}</span>
参考资料:
1. http://hahaya.github.io/use-enable-shared-from-this/
2. http://www.boost.org/doc/libs/1_39_0/doc/html/boost_asio/tutorial/tutdaytime3/src.html














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









