






基于simulink的数字双闭环PFC设计
控制回路采用c语言编写pi补偿器,仿真的pi参数可以直接用于dsp程序设计。
完整模拟离散系统的控制方式。
整个simulink仿真在Discrete模式下进行。
仿真指标:
输入交流电压:220v
工频:50hz
输出负载:1kw
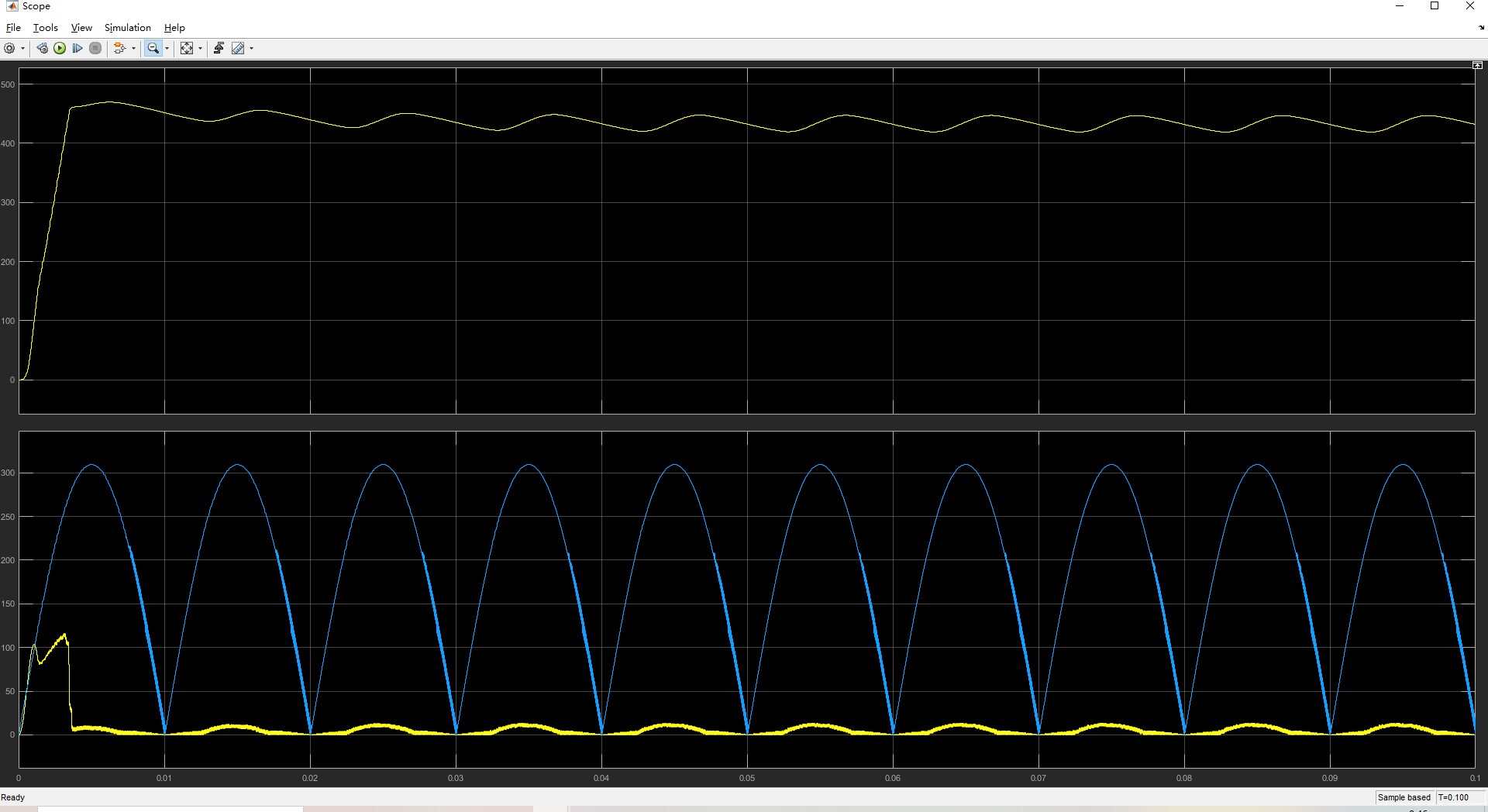
输出电压:400v
开关频率:100khz
功率因数:0.99
纹波电压:40v
包括整个仿真文档,设计计算文档。
ID:97499639498773711
玩电的和尚


本文将围绕"基于Simulink的数字双闭环PFC设计"展开,对控制回路的实现以及仿真过程进行详细分析。通过使用Simulink进行仿真,可以模拟出离散系统的整个控制过程,并根据仿真结果进行参数的优化。
首先,我们采用C语言编写PI补偿器,该补偿器能够对输入信号进行修正,并根据输出信号的反馈结果进行闭环控制。在仿真过程中,我们可以直接使用仿真得到的PI参数应用于DSP程序设计,从而实现系统的数字化控制。
整个Simulink仿真过程在Discrete模式下进行。在仿真过程中,我们需要模拟的指标包括输入交流电压、工频、输出负载、输出电压、开关频率、功率因数以及纹波电压等。通过对这些指标的仿真分析,可以评估系统的性能并进行相应的调整和优化。
首先,我们来分析输入交流电压。在实际应用中,电网供电的交流电压通常为220V,并且工频为50Hz。在Simulink中,我们可以使用电源模块来模拟输入电压,并设置其参数为220V和50Hz。
接下来是输出负载和输出电压。在本设计中,输出负载为1kW,输出电压为400V。通过连接负载和输出电压测量模块,我们可以在Simulink中实时监测输出负载和输出电压的波形,并对其进行有效的控制。
在数字双闭环PFC设计中,开关频率是一个关键参数。在本设计中,开关频率为100kHz。通过使用PWM模块,我们可以生成开关频率为100kHz的PWM信号,并将其应用于开关电源模块,从而实现对输出电压的控制。
功率因数是评估系统效率的重要指标之一。在本设计中,功率因数为0.99。通过设置合适的PI参数,并根据反馈信号进行闭环控制,我们可以实现输出电压与输入电压之间的匹配,从而使系统的功率因数接近0.99。
纹波电压是衡量系统稳定性的重要指标之一。在本设计中,纹波电压为40V。通过在仿真过程中监测输出电压的波形,可以评估系统的稳定性并进行相应的改进。
最后,我们需要编写仿真文档和设计计算文档。仿真文档应包括系统的整体架构、仿真参数的设定、仿真结果的分析以及相应的优化方案。设计计算文档应包括系统的设计计算公式、各个参数的计算过程以及相关的计算结果。
通过对基于Simulink的数字双闭环PFC设计进行全面的仿真分析,我们可以评估系统的性能并进行相应的调整和优化。这种基于Simulink的仿真方法不仅可以提高系统的稳定性和效率,还可以减少实际硬件实现的成本和风险。同时,仿真文档和设计计算文档的编写也能够提高整个设计过程的可追溯性和可复用性。
通过该设计的实践经验,可以为数字双闭环PFC设计提供一种有效的设计方法和仿真分析流程。希望本文所提供的思路和方法能够对读者在相关领域的技术研究和实践工作中有所启发。
相关的代码,程序地址如下:http://imgcs.cn/639498773711.html
















 325
325

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









