






基于变时域(Np)的MPC(模型预测控制)的超车路径规划控制
Carsim是8.1版本。
有安装教程
内附有相关论文可进行参考
ID:3266755545028516
东方举重的紫薯

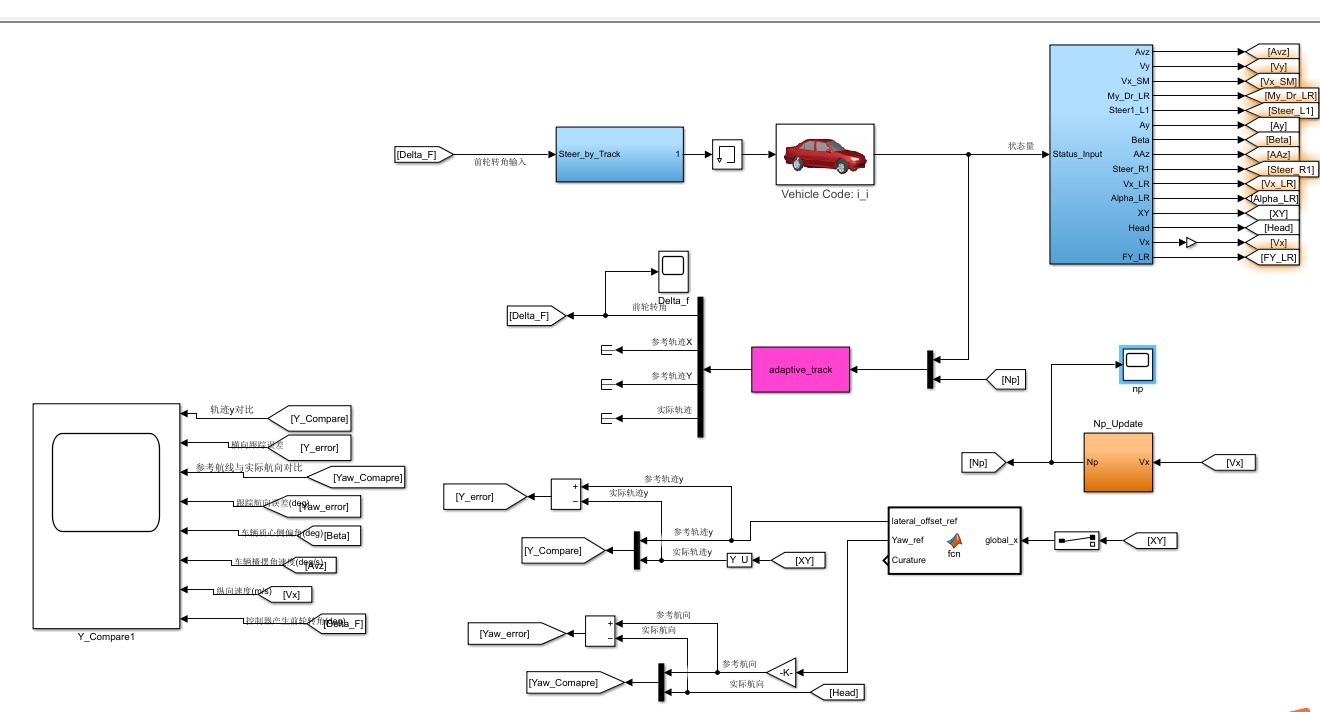
在汽车行驶过程中,超车是常见的交通行为之一。针对超车过程中的路径规划与控制问题,基于变时域(Np)的模型预测控制(MPC)是一种被广泛应用的方法。本文将重点探讨基于变时域的MPC在超车路径规划和控制中的应用。
首先,我们需要介绍一下Carsim 8.1版本。Carsim是一种用于汽车动力学仿真的软件,其8.1版本具有强大的功能和易用性。对于想要使用Carsim进行超车路径规划和控制的开发者来说,了解Carsim的安装教程是必不可少的。在本文中,我们将提供详细的Carsim 8.1版本的安装教程,以帮助开发者快速掌握该软件的使用方法。
在超车路径规划和控制中,模型预测控制(MPC)是一种被广泛应用的方法。MPC基于车辆模型和环境信息,通过预测车辆未来的状态来生成最优的控制策略。在基于变时域的MPC中,我们通过引入变时域的概念,将车辆控制过程分为多个时域,并在每个时域内进行控制策略的优化。这样做的好处是可以更加精细地调节控制策略,提高超车过程的性能和安全性。
为了实现基于变时域的MPC的超车路径规划和控制,我们需要建立准确的车辆模型和环境模型。车辆模型可以通过Carsim软件进行建模,并根据具体的车辆参数进行参数配置。在Carsim中,我们可以设置车辆的质量、悬挂系统、驱动系统等参数,以获得准确的车辆动力学模型。环境模型则可以通过传感器获取到的数据进行建模,例如车辆周围的障碍物、道路状况等。通过准确建模车辆和环境,我们可以更加精确地进行超车路径规划和控制。
基于变时域的MPC的超车路径规划和控制主要包括以下几个步骤:
- 车辆状态估计:通过车辆传感器获取车辆的状态信息,例如位置、速度、加速度等。
- 环境感知:通过传感器获取车辆周围的环境信息,例如周围的车辆、道路状况等。
- 路径规划:根据车辆状态和环境信息,生成超车的路径规划。路径规划需要考虑超车的安全性和效率,以及避免与其他车辆的碰撞。
- 控制策略生成:根据路径规划结果,生成最优的控制策略。在基于变时域的MPC中,我们可以在每个时域内进行控制策略的优化,以得到最优的控制策略。
- 控制执行:根据控制策略,对车辆执行相应的控制动作。控制动作可以通过车辆的操纵系统来实现,例如刹车、加速等。
通过以上步骤,基于变时域的MPC可以实现对超车过程的路径规划和控制。该方法可以提高超车的安全性和效率,同时也可以提供更好的驾驶体验。
总结起来,本文主要介绍了基于变时域的MPC在超车路径规划和控制中的应用。通过Carsim 8.1版本的安装教程和相关论文的参考,开发者可以了解如何使用Carsim进行超车路径规划和控制。通过详细的步骤描述和技术分析,本文提供了一种实实在在的技术分析文章,以帮助开发者更好地理解和应用基于变时域的MPC方法。希望本文对开发者在超车路径规划和控制方面的研究和实践有所帮助。
以上相关代码,程序地址:http://fansik.cn/755545028516.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









