




 本文介绍了Revit中遇到管道连接问题的解决方案,包括避免捕捉CAD交点和切换捕捉点的方式,以及如何利用BIM建模助手的‘一键管线连接’功能,实现快速、自定义角度的管道连接操作。此外,提到了BIM建模助手的多种免费功能模块。
本文介绍了Revit中遇到管道连接问题的解决方案,包括避免捕捉CAD交点和切换捕捉点的方式,以及如何利用BIM建模助手的‘一键管线连接’功能,实现快速、自定义角度的管道连接操作。此外,提到了BIM建模助手的多种免费功能模块。
一、Revit中管道连接问题
在导入CAD绘制管线时,有时会遇到如图1所示问题,两根管道在同一标高垂直相交,但并没有自动生成三通连接件。

这种情况往往是因为在绘制另一根管道时,捕捉到CAD中两根线的交点,如图2所示,Revit会提示捕捉到的是交点。

当捕捉到交点的时候,系统就认不得这里要生产一个三通相连。所以,在绘制这种相交地方,可以按Tb键切换一下捕捉点,当捕捉到管线中心线时绘制即可,如图3所示。

或者,捕捉到管道边线也可生成连接三通,如图4所示。

二、Revit中实现“一键管线连接”
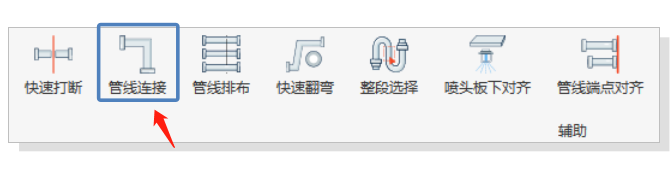
建模助手“机电模块” → 管线连接功能
1.机电模块→工具栏中点击【管线连接】功能。
2.我们选择管线连接的角度,这
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2818
2818

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









