









HarmonyOS next 示例代码全集
AREngine_SampleCode_Clientdemo_cpp: 本示例通过调用AR引擎服务接口,结合XComponent和OpenGL/EGL,将识别到的点云信息,平面信息等显示在屏幕上。
AREngine
介绍
本示例展示了AREngine提供的平面检测,运动跟踪,环境跟踪和碰撞检测能力。
效果预览
| 应用首页 | 识别平面 | 通过碰撞检测显示模型 |
|---|---|---|
|
|
|
|
- 在手机的主屏幕,点击“ArSample”,启动应用,在主界面可见“ArWorld”按钮。
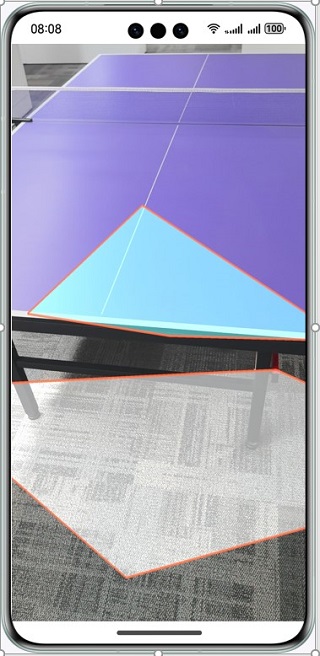
- 点击“ArWorld”按钮,拉起ArEngine平面识别界面,对准地面,桌面,墙面等平面缓慢移动扫描,即可识别到平面并绘制到屏幕上。
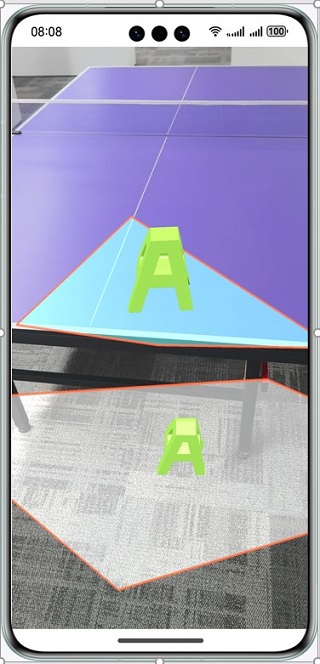
- 识别出平面后,点击平面上某个点,通过AREngine提供的命中检测的能力,会在屏幕被点击位置放置一个3d模型。
具体实现
集成服务
使用AREngine服务接口需要在CMakeLists中引入依赖:
find_library(
arengine-lib
libarengine_ndk.z.so
)
target_link_libraries(entry PUBLIC
${arengine-lib}
)
使用时引入头文件 #include "ar/ar_engine_core.h"
代码结构解析
├─entry/src/main │ module.json5 // 模块的配置文件。 │ ├─cpp // C++代码区。 │ │ CMakeLists.txt // CMake配置文件。 │ │ │ ├─src │ │ │ app_napi.h // 业务侧虚基类。 │ │ │ global.cpp // napi初始化。 │ │ │ global.h // C++和ets接口映射配置。 │ │ │ module.cpp // C++接口注册。 │ │ │ napi_manager.cpp // C++接口实现。 │ │ │ napi_manager.h │ │ │ │ │ ├─graphic // 渲染相关工具类 │ │ │ │ │ ├─utils // util工具类。 │ │ │ │ │ └─world // ArWorld模块。 │ │ world_ar_application.cpp // ArWorld模块接口实现。 │ │ world_ar_application.h │ │ world_background_renderer.cpp // 背景渲染。 │ │ world_background_renderer.h │ │ world_object_renderer.cpp // 3D物体渲染。 │ │ world_object_renderer.h │ │ world_plane_renderer.cpp // 平面渲染。 │ │ world_plane_renderer.h │ │ world_render_manager.cpp // 每一帧渲染。 │ │ world_render_manager.h │ │ │ ├─thirdparty // 渲染相关三方库 │ └─types // 接口存放文件夹。 │ └─libentry │ index.d.ts // 接口文件。 │ oh-package.json5 // 接口注册配置文件。 │ ├─ets // ets代码区。 │ ├─entryability │ │ EntryAbility.ets // 程序入口类。 │ │ │ ├─pages │ │ ArWorld.ets // ArWorld界面。 │ │ Selector.ets // 主界面。 │ │ │ └─utils │ Logger.ets // ets日志打印。 │ └─resources // 资源文件目录。
创建会话和帧数据相关接口
AREngine_ARStatus HMS_AREngine_ARConfig_Create(const AREngine_ARSession *session, AREngine_ARConfig **outConfig); void HMS_AREngine_ARConfig_Destroy(AREngine_ARConfig *config); AREngine_ARStatus HMS_AREngine_ARSession_Create(void *env, void *applicationContext, AREngine_ARSession **outSessionPointer); AREngine_ARStatus HMS_AREngine_ARSession_Configure(AREngine_ARSession *session, const AREngine_ARConfig *config); void HMS_AREngine_ARSession_Destroy(AREngine_ARSession *session); AREngine_ARStatus HMS_AREngine_ARFrame_Create(const AREngine_ARSession *session, AREngine_ARFrame **outFrame); void HMS_AREngine_ARFrame_Destroy(AREngine_ARFrame *frame);
平面识别相关接口:
AREngine_ARStatus HMS_AREngine_ARTrackableList_Create(const AREngine_ARSession *session, AREngine_ARTrackableList **outTrackableList); AREngine_ARStatus HMS_AREngine_ARSession_GetAllTrackables(const AREngine_ARSession *session, AREngine_ARTrackableType filterType, AREngine_ARTrackableList *outTrackableList); AREngine_ARStatus HMS_AREngine_ARTrackableList_GetSize(const AREngine_ARSession *session, const AREngine_ARTrackableList *trackableList, int32_t *outSize); AREngine_ARStatus HMS_AREngine_ARTrackableList_AcquireItem(const AREngine_ARSession *session, const AREngine_ARTrackableList *trackableList, int32_t index, AREngine_ARTrackable **outTrackable); void HMS_AREngine_ARTrackableList_Destroy(AREngine_ARTrackableList *trackableList); AREngine_ARStatus HMS_AREngine_ARTrackable_GetTrackingState(const AREngine_ARSession *session, const AREngine_ARTrackable *trackable, AREngine_ARTrackingState *outTrackingState); void HMS_AREngine_ARTrackable_Release(AREngine_ARTrackable *trackable); AREngine_ARStatus HMS_AREngine_ARPlane_AcquireSubsumedBy(const AREngine_ARSession *session, const AREngine_ARPlane *plane, AREngine_ARPlane **outSubsumedBy); AREngine_ARStatus HMS_AREngine_ARPlane_AcquireSubsumedBy(const AREngine_ARSession *session, const AREngine_ARPlane *plane, AREngine_ARPlane **outSubsumedBy); AREngine_ARStatus HMS_AREngine_ARPlane_GetCenterPose(const AREngine_ARSession *session, const AREngine_ARPlane *plane, AREngine_ARPose *outPose); AREngine_ARStatus HMS_AREngine_ARPlane_GetPolygonSize(const AREngine_ARSession *session, const AREngine_ARPlane *plane, int32_t *outPolygonSize); AREngine_ARStatus HMS_AREngine_ARPlane_GetPolygon(const AREngine_ARSession *session, const AREngine_ARPlane *plane, float *outPolygonXz, int32_t polygonSize); AREngine_ARStatus HMS_AREngine_ARPlane_IsPoseInPolygon(const AREngine_ARSession *session, const AREngine_ARPlane *plane, const AREngine_ARPose *pose, int32_t *outPoseInPolygon);
碰撞检测相关接口:
AREngine_ARStatus HMS_AREngine_ARHitResultList_Create(const AREngine_ARSession *session, AREngine_ARHitResultList **outHitResultList); AREngine_ARStatus HMS_AREngine_ARHitResultList_GetSize(const AREngine_ARSession *session, const AREngine_ARHitResultList *hitResultList, int32_t *outSize); AREngine_ARStatus HMS_AREngine_ARHitResultList_GetItem(const AREngine_ARSession *session, const AREngine_ARHitResultList *hitResultList, int32_t index, AREngine_ARHitResult *outHitResult); void HMS_AREngine_ARHitResultList_Destroy(AREngine_ARHitResultList *hitResultList); AREngine_ARStatus HMS_AREngine_ARHitResult_AcquireNewAnchor(AREngine_ARSession *session, AREngine_ARHitResult *hitResult, AREngine_ARAnchor **outAnchor); AREngine_ARStatus HMS_AREngine_ARHitResult_GetHitPose(const AREngine_ARSession *session, const AREngine_ARHitResult *hitResult, AREngine_ARPose *outPose); AREngine_ARStatus HMS_AREngine_ARHitResult_AcquireTrackable(const AREngine_ARSession *session, const AREngine_ARHitResult *hitResult, AREngine_ARTrackable **outTrackable); void HMS_AREngine_ARHitResult_Destroy(AREngine_ARHitResult *hitResult);
运动跟踪能力图文介绍:
AR Engine通过获取终端设备摄像头数据,结合图像特征和惯性传感器(IMU),计算设备位置(沿x、y、z轴方向位移)和姿态(绕x、y、z轴旋转),实现6自由度(6DoF)运动跟踪能力。
6DoF运动跟踪能力示意图(红色线代表设备运动方向) 
相关权限
使用相机,加速度传感器和陀螺仪传感器权限,相机权限由应用申请。
依赖
依赖设备具备相机,加速度传感器和陀螺仪传感器能力。
约束与限制
- 本实例仅支持标准系统上运行,支持设备:华为手机(mate 60, mate 60pro, mate x5)。
- DevEco Studio版本:DevEco Studio NEXT Developer Beta2及以上。
- HarmonyOS SDK版本:HarmonyOS NEXT Developer Beta2及以上。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









