






[强化学习]一文带你理清从Q-Learning到DDPG(Deep Deterministic Policy Gradient)算法思想
强化学习的五大要素:
State、Action、Reward、Discount factor (r)、P 转移概率。
Q-Learning思想过程
- Q-learning是强化学习中基于价值的算法,是一种off-policy、免模型策略。
- Q-Learning就是在环境的某一个时刻的状态(state)下,采取动作集中的一个动作a能够获得收益的期望,环境会根据agent的动作反馈相应的reward奖赏,Q-learning根据reward更新Q表格。
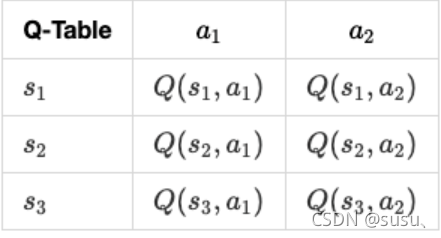
- 核心就是将state和action构建成一张Q_table表来存储Q值,然后根据Q值来选取能够获得最大收益的动作。
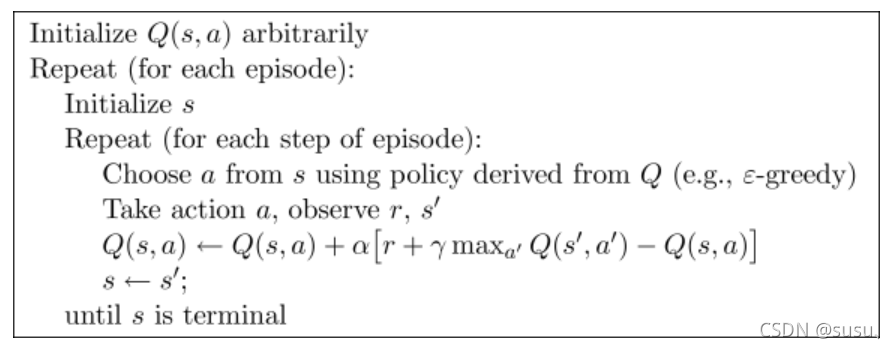
上伪代码:
-
初始时Q表格为空。
-
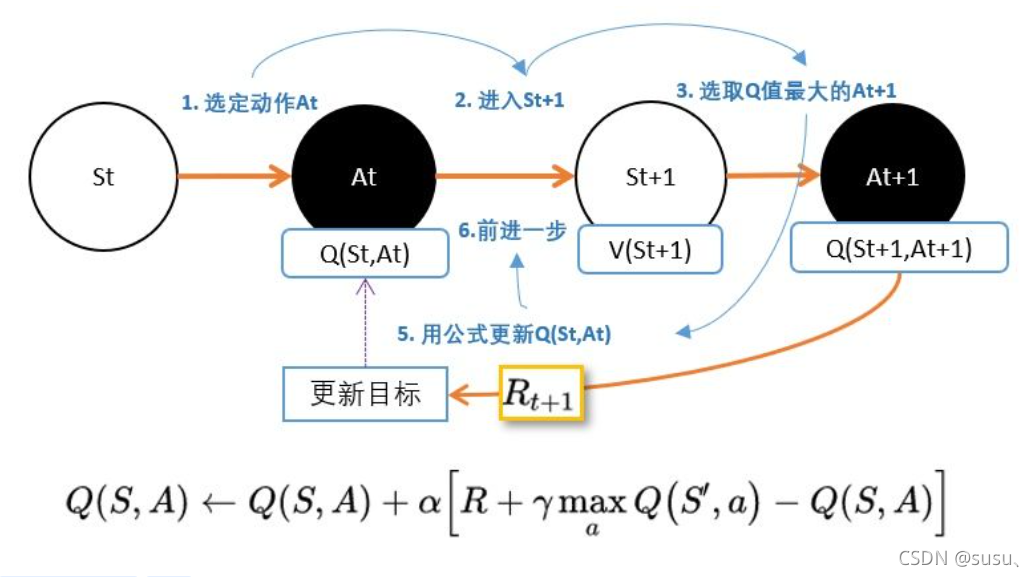
在每一个episode中智能体从环境s中基于e-greedy贪心的思想选择一个动作a。
注:
e-greedy:当超参数e设计为0.9时表示:有90%的概率选择Q表格中分数再大的action。否则有10%的概率随机选择动作。 -
将采取的动作a施加到环境中,并返回观测的状态s’,该动作的奖励。
-
根据返回的信息更新Q表格:
 (这个公式重点!)
(这个公式重点!)
更新当前Q(S,a):根据下一个状态s’中选取最大的Q ( s ′ , a ′ ) 值乘以衰变γ(即下一时刻最大动作的奖励折扣)加上真实回报值最为Q现实,而根据过往Q表里面的Q(s,a)作为Q估计。
5.更下当前状态。
DL与RL结合存在以下问题 :
- DL是监督学习需要学习训练集,强化学习不需要训练集只通过环境进行返回奖励值reward,同时也存在着噪声和延迟的问题,所以存在很多状态state的reward值都是0也就是样本稀疏
- DL每个样本之间互相独立,而RL当前状态的状态值是依赖后面的状态返回值的。 当我们使用非线性网络来表示值函数的时候可能出现不稳定的问题
DQN中的两大利器解决了以上问题
- 通过Q-Learning使用reward来构造标签
- 通过experience replay(经验池)的方法来解决相关性及非静态分布问题
- 使用一个MainNet产生当前Q值,使用另外一个Target产生TargetQ。
-
Q-Learning的局限:
其中最大的缺点就是Q-learning需要一个Q table,在状态很多的情况下,Q table会很大,查找和存储都需要消耗大量的时间和空间。
为此,使用神经网络代替查找Q表中Q值得计算以及查找过程。
可以用NN来近似 Q(S,A),以状态S和动作A为输入,输出对应的Q值。或者,另一种方式是,以状态作为输入,输入各种动作下对应的Q值。
引入神经网络的优点是可以方便地从所有输出中找到最高的Q值,从而决定最优的动作。
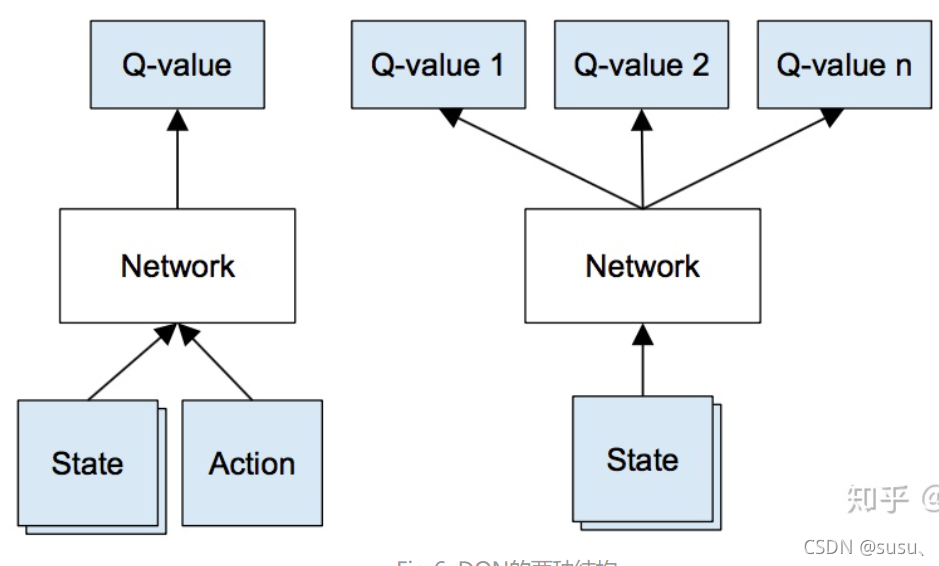
通常采用后者。
DQN
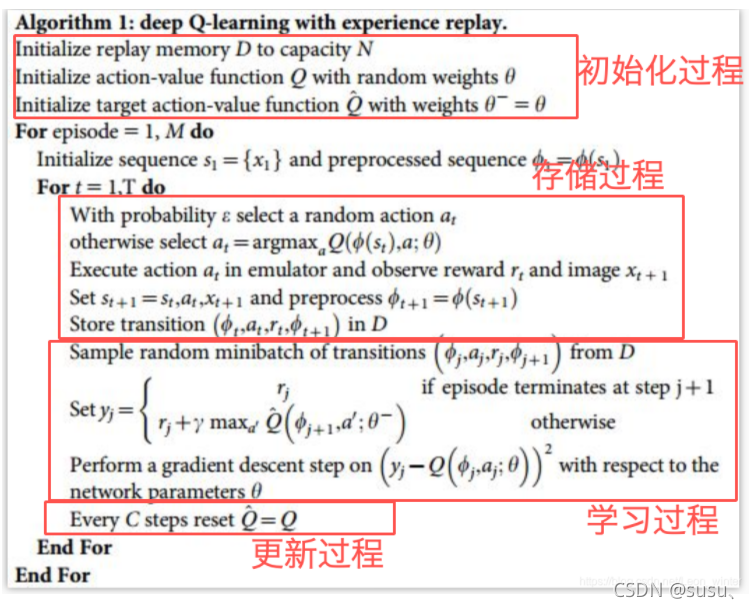
从代码中可以看到它有一个store experience的过程。即DQN采用了一个记忆库,用来存放之前的状态。
经验回放
初始时DQN与Qlearning一样会从环境中选取动作并执行行动得到环境返回的回报等。然后存储到记忆库中。只有当记忆库存储到一定容量之后才执行DQNPolicy更新策略。
- 经验池DQN中的记忆库用来学习之前的经历,又因为q-learning 是一种 off-policy 离线学习法, 它能学习当前经历着的,也能学习过去经历过的, 甚至是学习别人的经历,所以在学习过程中随机的加入之前的经验会让神经网络更有效率。
- 所以经验池解决了相关性及非静态分布问题。他通过在每个timestep下agent与环境交互得到的转移样本 (s ,a, r,s_) 储存到回放记忆网络,要训练时就随机拿出一些(minibatch)来训练因此打乱其中的相关性。
Q-target 目标网络
Q-targets的作用其实也是一种打乱相关性的机制,使用Q-targets会使得DQN中出现 两个结构完全相同但是参数却不同的网络。
预测Q估计的的网络使用的是最新的参数。
预测Q现实的Target网络参数使用的却是很久之前的。
- Q ( s , a ; ) 表示当前val网络的输出,用来评估当前状态动作对的值函数;
- Q ( s , a ; ) 表示Target网络的输出。
- 可以解出targetQ并根据LossFunction更新估计网络的参数,每经过一定次数的迭代,将估计网络的参数复制给Target网络。
- 引入Target网络后,再一段时间里目标Q值使保持不变的,一定程度降低了当前Q值和目标Q值的相关性,提高了算法稳定性。
DQN训练过程:
补充阅读:深度强化学习之深度Q网络DQN详解
Sarsa
与DQN不同的是Sarsa是on-policy的更新方式。
它的行动策略和评估策略与DQN一样都是ε-greedy策略, 也是采用Q-table的方式存储动作值函数。
sarsa伪代码:
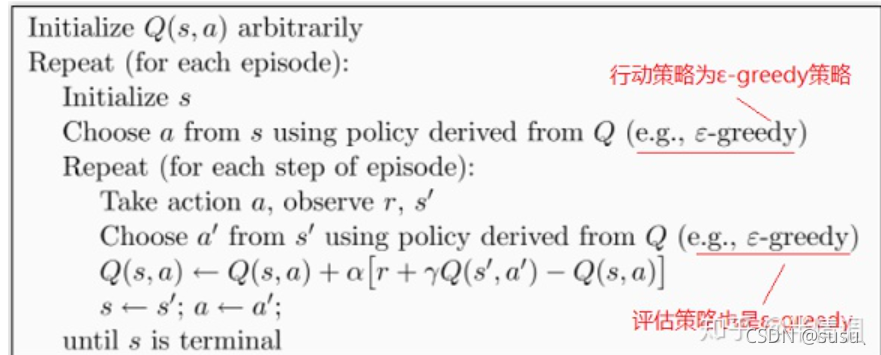
从代码中可以看到Sarsa是先做出动作后更新。
- Qlearning是先假设下一步选取最大奖赏的动作,更新值函数。然后再通过ε-greedy策略选择动作。
- Sarsa算法,先通过ε-greedy策略执行动作,然后根据所执行的动作,更新值函数。
sarsa与Qlearning的不同之处:
- 在Q值的更新上,Q-learning中对下一个状态和动作采取的是max的操作,即每一步都选取Q值最大的动作。
- 而Sarsa则相对保守,在更新Q(s,a) 时基于的是下一个 Q(s′,a′)。
两个算法都用了epsilon-greedy来选择action。但是,Sarsa 是在learn之前是用epsilon-greedy选中一个action,并确定用这个action进行learn,所以下一步update的action就是要learn的action。所以当前learn的不一定是最大奖励的。而Q-learning对下一步的action取max,每步learn的都是眼前奖励最大的,但由于epsilon-greedy存在随机性,可能会跳出贪心,转变为随机选择,所以下一步update的action大概率不是要learn的。
总: Q-learnin是off-policy算法,而sarsa是on-policy算法。两者在算法上的区别就在于Q值更新的不同。换句话说,Q-learning在下一步更新时,考虑的是下一时刻中的最大Q值,而Sarsa是即时更新,在更新的时候,只考虑下一时刻的Q值。
Sarsa(lambda)算法
Sarsa(lambda)算法是Sarsa 的改进版,二者的主要区别在于:
在每次take action获得reward后,Sarsa只对前一步Q(s,a)进行更新,Sarsa(lambda) 则会对获得reward之前的步进行更新。
Sarsa(lambda)算法的流程如下:
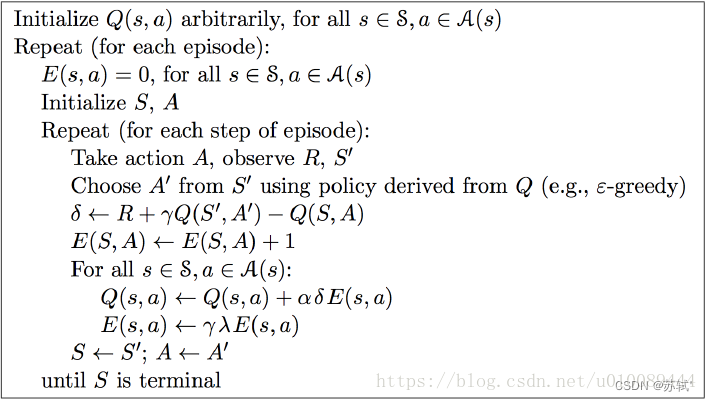
从上图可以看出,和Sarsa相比,Sarsa(lambda)算法中多了一个矩阵E (eligibility trace),它是用来保存在路径中所经历的每一步,因此在每次更新时也会对之前经历的步进行更新。
参数lambda取值范围为[0, 1] ,如果 lambda = 0,Sarsa(lambda) 将退化为Sarsa,即只更新获取到 reward 前经历的最后一步;如果 lambda = 1,Sarsa(lambda) 更新的是获取到 reward 前的所有步。lambda 可理解为脚步的衰变值,即离奶酪越近的步越重要,越远的步则对于获取奶酪不是太重要。
和Sarsa相比,Sarsa(lambda)算法有如下优势:
- Sarsa虽然会边走边更新,但是在没有获得奶酪之前,当前步的Q值是没有任何变化的,直到获取奶酪后,才会对获取奶酪的前一步更新,而之前为了获取奶酪所走的所有步都被认为和获取奶酪没关系。Sarsa(lambda)则会对获取奶酪所走的步都进行更新,离奶酪越近的步越重要,越远的则越不重要(由参数lambda控制衰减幅度)。因此,Sarsa(lambda)
能够更加快速有效的学到最优的policy。
1.sarsa(0)是但不更新,每走一步更新一次,在获取到宝藏后,可能最开始会原地打转有一些重复无意义的步也被记录下来。
2.sarsa(n) 是回合更新,即只有当获取到宝藏之后才对最后一步进行更新,这样会导致他认为之前所走的每一步都是无意义的。
3.sarsa(lambda) 找到宝藏之后,对之前的所有步数进行更新,通过脚步衰减值控制离奖励不同远近的步数的Q值。
注意,该算法与Sarsa 算法不同的地方就是多乘了一个E(s, a) (Eligibility Trace”不可或缺性值”),而这个E(s, a)又同时受γ和λ调控。并且在更新Q表的时候,不仅仅是更新一个Q(S,A),而是整个Q表所有的Q值都被更新了。
策略梯度算法(Policy Gradient)
PG与DQN不同的是它是基于策略的RL算法。
DQN系列强化学习算法主要的问题主要有三点。
- 第一点是对连续动作的处理能力不足。DQN之类的方法一般都是只处理离散动作,无法处理连续动作。
- 第二点是对受限状态下的问题处理能力不足。
- 第三点是无法解决随机策略问题。Value Based强化学习方法对应的最优策略通常是确定性策略,而有些问题的最优策略却是随机策略。
Policy Based强化学习方法可解决以上value based的问题。
Policy gradient: 输出的这个 action 可以是一个连续的值, 之前的 value-based 方法输出的都是不连续的值, 然后再选择值最大的 action. 而 policy gradient 可以在一个连续分布上选取 action。
这样我们可以利用PG解决连续动作空间的问题。
PG算法思想:
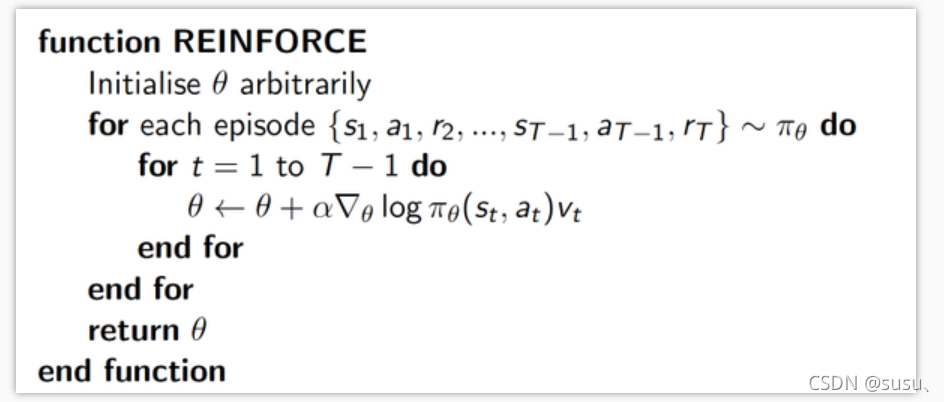
可以看到PG是基于回合更新的,也就是说它只有当一个回合结束之后才能更新,而不能向DQN一样在回合中的每一个步进行更新。
补充阅读:
【强化学习】策略梯度(Policy Gradient)
策略梯度方法笔记
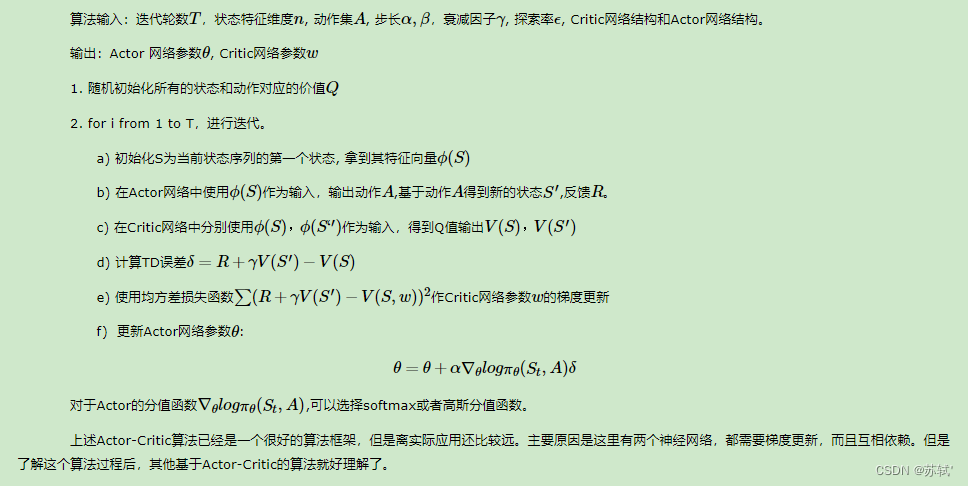
Actor Critic(演员评论家)
它合并了 以值为基础 (比如 Q learning) 和 以动作概率为基础 (比如 Policy Gradients) 两类强化学习算法。完美解决了PG不能基于batch更新的缺点。
Actor Critic有两套不同的体系, Actor 和 Critic, 他们都能用不同的神经网络来代替 。
- Actor网络其实就相当于PG,(基于策略的网络)输入S,输出当前S的action。
- Critic相当于DQN可以进行单步更新。(基于价值的网络),输入Actor估计出来的action,输出该action的Q值。计算出td_error再根据这个td_error来更新Actor网络,使得下次Actor选出的action的reward最大化。
就像他的名字一样,右Actor演员来选取动作,由Critic评论家来点评Actor的动作,使得Actor进行改进。

Deep Deterministic Policy Gradient(DDPG)
- DDPG算法是基于DPG算法所提出的,属于无模型中的actor-critic方法中的off-policy算法。
解决了Actor-Critic 神经网络每次参数更新前后都存在相关性,导致神经网络只能片面的看待问题这一缺点。 - 同时也解决了DQN不能用于连续性动作的缺点。
- DDPG拆开来看,Deep是说明需要神经网络。 Deterministic的意思就是最终确定地只输出一个动作。 Policy
- Gradient我们已经知道是策略梯度算法。
- DDPG可以看成是DQN的扩展版,不同的是,以往的DQN在最终输出的是一个动作向量,对于DDPG是最终确定地只输出一个动作。而且,DDPG让
DQN 可以扩展到连续的动作空间。
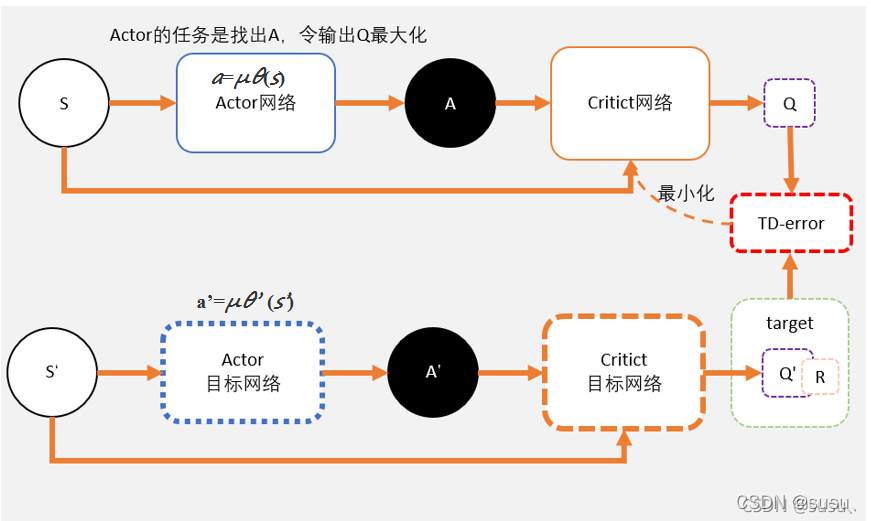
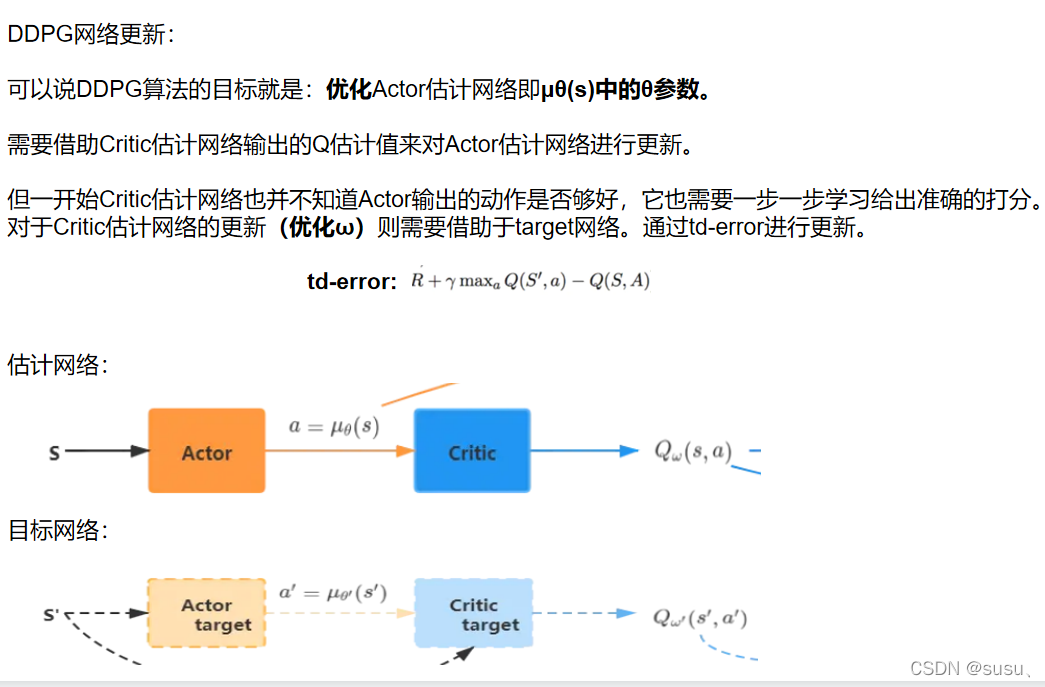
网络结构:
-
DDPG的结构形式类似Actor-Critic。DDPG可以分为策略网络和价值网络两个大网络。
-
DDPG延续DQN了固定目标网络的思想,每个网络再细分为目标网络和现实网络。
策略网络:Actor
输入:s
输出:a
Actor还有一个相同结构但不同参数的目标网络,是用来更新价值网络Critic的。两个网络都是输出动作action。
价值网络:Critic
输出:出当前状态的价值 q-value。
Critic的eval网络输入:当前Actor的估计网络输出的动作action
Critic的target网络输入:当前状态的观测值和Actor的目标网络输出的动作action。
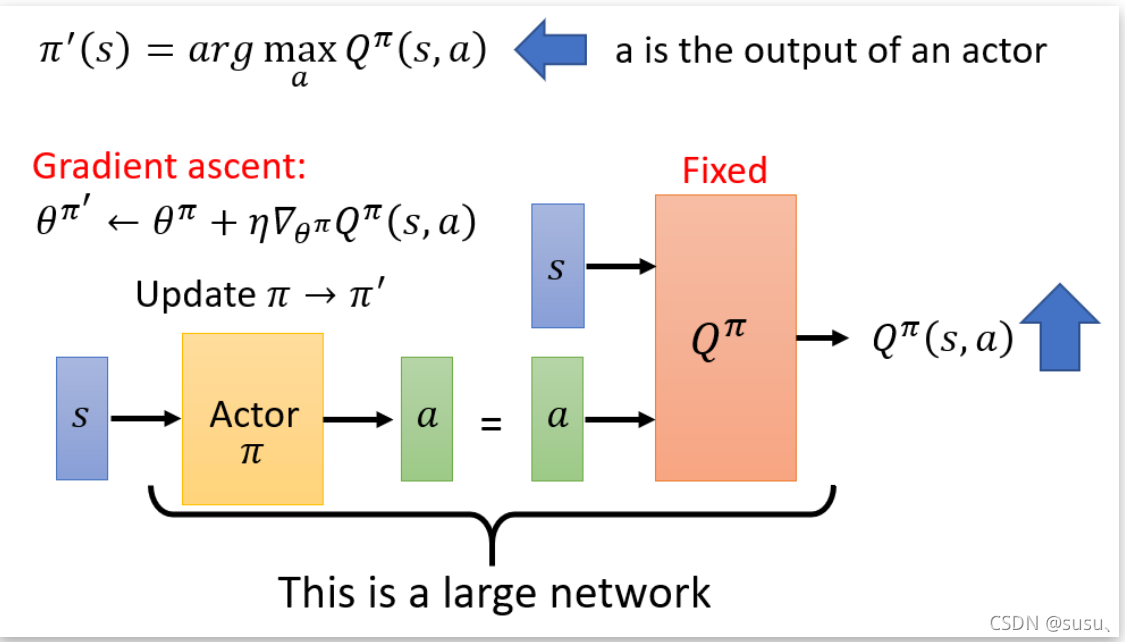
- Actor的目标是找到一个动作a能使得输出的价值Q最大。优化策略网络的梯度就是要最大化价值网络输出的这个Q值。
- Critic作用就是来拟合价值函数 Qω(s,a)。
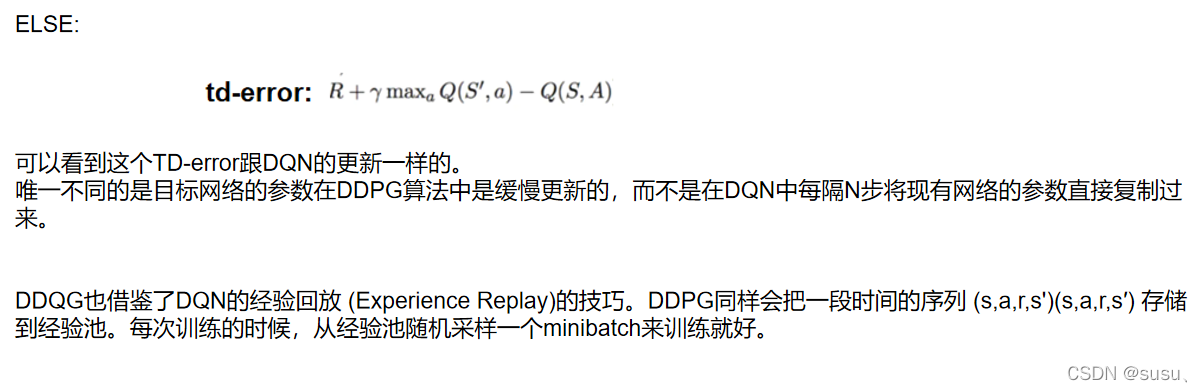
思想过程:
现在我们回到DDPG,作为DDPG,Critic当前网络,Critic目标网络和DDQN的当前Q网络,目标Q网络的功能定位基本类似,但是我们有自己的Actor策略网络,因此不需要ϵ−贪婪法这样的选择方法,这部分DDQN的功能到了DDPG可以在Actor当前网络完成
代码:
经验池
class Memory(object):
def __init__(self, capacity, dims):
self.capacity = capacity
self.data = np.zeros((capacity, dims)) # capacity行 dims列 记忆库的形状矩阵
self.pointer = 0 # 指向当前那行值
# 存贮
def store_transition(self, s, a, r, s_):
transition = np.hstack((s, a, r, s_)) # 按水平方向进行叠加 相当于多少列
index = self.pointer % self.capacity # replace the old memory with new memory
self.data[index, :] = transition # 矩阵切片 对第index行进行赋值
self.pointer += 1
# 采样 --行数
def sample(self, n):
assert self.pointer >= self.capacity, 'Memory has not been fulfilled'
indices = np.random.choice(self.capacity, size=n) # 从0~capacity个行中随机取出n。但是有重复(indices 是ndarray)
return self.data[indices, :] # 一起返回这么些行的内容 (返回类型:ndarray)
Actor网络:
def get_actor(input_state_shape, name=''):
inputs = tl.layers.Input(input_state_shape, name='A_input')
x = tl.layers.Dense(n_units=30, act=tf.nn.relu, W_init=W_init, b_init=b_init, name='A_l1')(inputs)
x = tl.layers.Dense(n_units=a_dim, act=tf.nn.tanh, W_init=W_init, b_init=b_init, name='A_a')(x)
x = tl.layers.Lambda(lambda x: np.array(a_bound) * x)(x)
return tl.models.Model(inputs=inputs, outputs=x, name='Actor' + name)
Critic网络:
def get_critic(input_state_shape, input_action_shape, name=''):
s = tl.layers.Input(input_state_shape, name='C_s_input')
a = tl.layers.Input(input_action_shape, name='C_a_input')
x = tl.layers.Concat(1)([s, a])
x = tl.layers.Dense(n_units=60, act=tf.nn.relu, W_init=W_init, b_init=b_init, name='C_l1')(x)
x = tl.layers.Dense(n_units=1, W_init=W_init, b_init=b_init, name='C_out')(x)
return tl.models.Model(inputs=[s, a], outputs=x, name='Critic' + name)
🥦🐥,搬运工的日常。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











