







在使用RTOS的时候一个实时应用可以作为一个独立的任务。每个任务都有自己的运行环境, 不依赖于系统中其他的任务或者RTOS调度器。 任何一个时间点只能有一个任务运行,具体运行哪个任务是由RTOS调度器来决定的, RTOS调度器因此就会重复的开启、关闭每个任务
任务状态
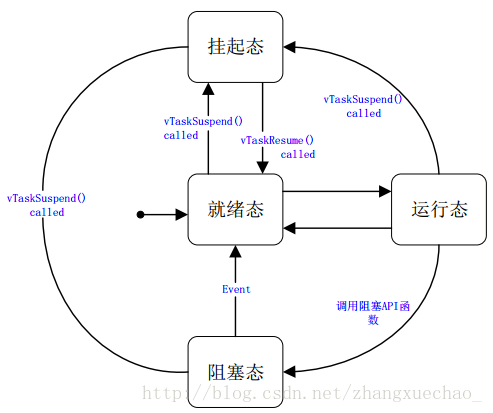
运行态
当一个任务正在运行时,那么就说这个任务处于运行态,处于运行态的任务就是当前正在
使用处理器的任务
就绪态
可以运行的任务。有一个同优先级或者更高优先级的任务正在运行
阻塞态
一个任务当前正在等待某个外部事件
挂起态
进入挂起态以后也不能被调度器调用。任务进入和退出挂起态通过调用函数vTaskSuspend()和xTaskResume()
任务状态转换
任务创建
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode, //函数指针
const char * const pcName,
const uint16_t usStackDepth, //堆栈大小
void * const pvParameters, //给任务传递参数
UBaseType_t uxPriority, //任务的优先级
TaskHandle_t * const pxCreatedTask /*任务句柄*/) PRIVILEGED_FUNCTION;pxTaskCode:任务函数
pcName:任务名字
usStackDepth:任务堆栈大小
pvParameters:传递给任务函数的参数
uxPriority:任务优先级
pxCreatedTask:任务句柄
TaskHandle_t xTaskCreateStatic( TaskFunction_t pxTaskCode,
const char * const pcName,
const uint32_t ulStackDepth,
void * const pvParameters,
UBaseType_t uxPriority,
StackType_t * const puxStackBuffer,
StaticTask_t * const pxTaskBuffer ) PRIVILEGED_FUNCTION;puxStackBuffer:任务堆栈。一般为数组
pxTaskBuffer:任务控制块
任务删除
void vTaskDelete( TaskHandle_t xTaskToDelete ) PRIVILEGED_FUNCTION;xTaskToDelete:任务句柄
挂起任务
void vTaskSuspend( TaskHandle_t xTaskToSuspend )恢复任务
void vTaskResume( TaskHandle_t xTaskToResume )中断服务函数中恢复任务运行
BaseType_t xTaskResumeFromISR( TaskHandle_t xTaskToResume )举例
TaskHandle_t pxCreatedTask;
void TIM4_IRQHandler()
{
if(TIM_GetITStatus(TIM4, TIM_IT_Update) == 1)
{
xTaskResumeFromISR(pxCreatedTask); //中断服务函数中恢复任务运行
}
TIM_ClearITPendingBit(TIM4, TIM_IT_Update);
}
void key()
{
static u8 flag = 1;
if(flag == 1 && key_up == 1)
{
vTaskDelay(10);
if(key_up == 1)
{
flag = 0;
vTaskSuspend(pxCreatedTask); //挂起任务
}
}
else if(key_up == 0)
{
vTaskDelay(10);
if(key_up == 0)
{
flag = 1;
}
}
}
void vTask_key(void *t)
{
while(1)
{
key();
}
}
int main(void)
{
TIM4_init(10000, 36000-1); //初始化定时器(详见定时器章节)
xTaskCreate(vTask, "vTask", 50, NULL, 1, &pxCreatedTask);
xTaskCreate(vTask_key, "vTask_key", 50, NULL, 2, NULL);
vTaskStartScheduler();
}实验现象:当按键按下,挂起任务。当定时器中断产生,恢复任务运行















 396
396

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









