







文章目录
Btrfs
Btrfs是下一代的即写即拷文件系统,它支持许多先进的存储技术,非常适合Docker。主线Linux内核中包含了Btrfs。
Docker的btrfs存储驱动程序利用了许多btrfs特性来进行镜像和容器管理。这些特性包括块级操作、精简配置、即写即拷快照和易于管理。可以轻松地将多个物理块设备组合到单个Btrfs文件系统中。
前提条件
-
Docker Engine - Community: 对于社区版,只建议在Ubuntu或Debian上使用btrfs。
-
Docker EE:对于Docker EE和cs引擎,btrfs只支持SLES。
-
更改存储驱动程序将使已经创建的任何容器在本地系统上无法访问。使用docker save来保存容器,并将现有的镜像推入docker Hub或私有存储库,这样就不需要在以后重新创建。
-
btrfs需要一个专用的块存储设备,如物理磁盘。这个块设备必须针对Btrfs进行格式化,并安装到/var/lib/docker/中。
-
内核必须支持btrfs。运行以下命令检查:
cat /proc/filesystems | grep btrfs -
要在操作系统级别管理BTRFS文件系统,需要使用BTRFS命令。如果没有这个命令,安装btrfsprogs包(SLES)或btrfs-tools包(Ubuntu)。
配置Docker以使用btrfs存储驱动器
- 停止Docker。
- 将/var/lib/docker/的内容复制到备份位置,然后清空/var/lib/docker/的内容:
cp -au /var/lib/docker /var/lib/docker.bk rm -rf /var/lib/docker/* - 将专用块设备或设备格式化为Btrfs文件系统。
mkfs.btrfs -f /dev/xvdf /dev/xvdg - 在/var/lib/docker/挂载点上挂载新的Btrfs文件系统。不要忘记通过向/etc/ fstabb添加一个条目来使更改在重新引导时保持永久性。
mount -t btrfs /dev/xvdf /var/lib/docker - 将/var/lib/docker.bk的内容复制到/var/lib/docker/。
cp -au /var/lib/docker.bk/* /var/lib/docker/ - 配置Docker以使用btrfs存储驱动程序。即使/var/lib/docker/现在正在使用Btrfs文件系统,这也是必需的。编辑或创建文件/etc/docker/daemon.json。如果是新文件,请添加以下内容。如果它是现有文件,则仅添加键和值,如果不是结束大括号(})之前的最后一行,请小心以逗号结束。
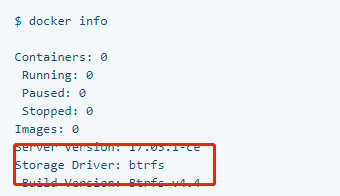
{ "storage-driver": "btrfs" } - 通过docker info验证
管理Btrfs卷
Btrfs的优点之一是易于管理Btrfs文件系统,而无需卸载文件系统或重新启动Docker。
当空间不足时,Btrfs会自动以大约1 GB的块扩展卷。
要将块设备添加到Btrfs卷,使用btrfs device add和 btrfs filesystem balance命令。
btrfs device add /dev/svdh /var/lib/docker
btrfs filesystem balance /var/lib/docker
btrfs存储驱动程序如何工作
btrfs存储驱动程序与设备映射程序或其他存储驱动程序的工作方式不同,因为整个/var/lib/docker/目录都存储在btrfs卷中。
磁盘上的镜像和容器层
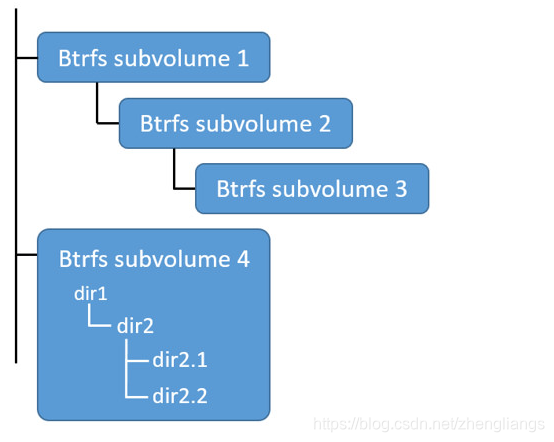
关于镜像层和可写容器层的信息存储在/var/lib/docker/btrfs/subvolumes/中。此子目录包含每个镜像或容器层的一个目录,由一个层及其所有父层构建的统一文件系统。子卷是原生的即写即拷,并从底层存储池按需为它们分配空间。它们也可以嵌套和抓拍。下图显示了4个子卷。“Subvolume 2”和“Subvolume 3”是嵌套的,而“Subvolume 4”则显示它自己的内部目录树。
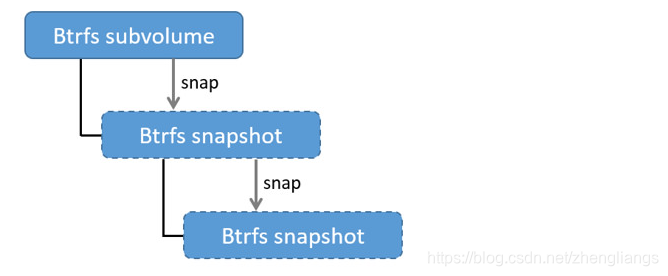
仅镜像的基础层存储为真实的子体积。所有其他层都存储为快照,其中仅包含该层中引入的差异。可以如下图所示创建快照的快照。
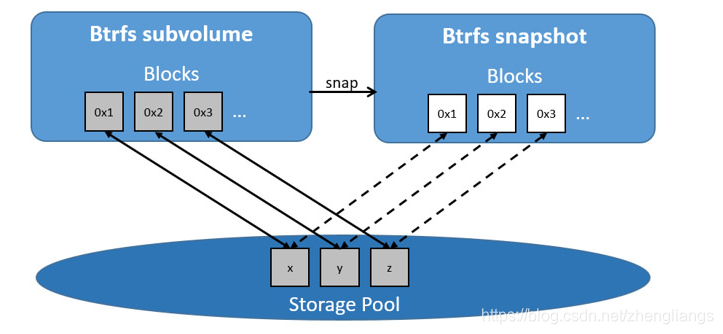
在磁盘上,快照的外观和感觉就像子卷一样,但实际上它们更小且更节省空间。写入时复制用于最大化存储效率和最小化层大小,并且在块级别管理容器可写层中的写入。下图显示了一个子卷及其快照共享数据。
为了获得最大的效率,当一个容器需要更多空间时,将以大约1 GB的块为单位进行分配 。
Docker的btrfs存储驱动程序将每个镜像层和容器存储在它自己的btrfs子卷或快照中。镜像的基本层存储为子卷,而子镜像层和容器存储为快照。如下图所示。
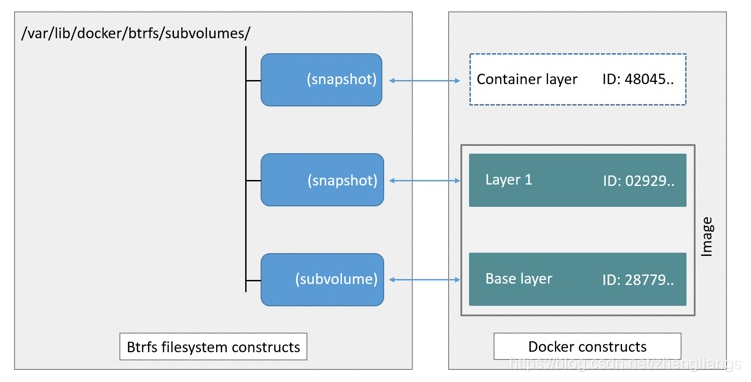
在运行btrfs驱动程序的Docker主机上创建镜像和容器的高级过程如下:
- 镜像的基础层存储在/var/lib/docker/btrfs/subvolume下的Btrfs子卷中。
- 后续的镜像层存储为父层的子卷或快照的Btrfs快照,但是这一层引入了更改。这些差异存储在块级别。
- 容器的可写层是最终镜像层的Btrfs快照,不同之处在于运行的容器。这些差异存储在块级别。
容器如何使用btrfs读写数据
读取文件
- 容器是镜像的节省空间的快照。快照中的元数据指向存储池中的实际数据块。这与子卷相同。因此,对快照执行的读操作本质上与对子卷执行的读操作相同。
修改文件
写入新文件:将新文件写入容器会调用按需分配操作,以将新数据块分配给容器的快照。然后将文件写入此新空间。按需分配操作是使用Btrfs进行的所有写入所固有的,并且与将新数据写入子卷相同。结果,将新文件写入容器的快照以本机Btrfs速度运行。修改现有文件:更新容器中的现有文件是写时复制操作(写时重定向是Btrfs术语)。从文件当前所在的层读取原始数据,并且仅将修改后的块写入容器的可写层。接下来,Btrfs驱动程序更新快照中的文件系统元数据以指向此新数据。此行为产生很少的开销。删除文件或目录:如果容器删除了下层中存在的文件或目录,则Btrfs会掩盖下层中文件或目录的存在。如果容器创建一个文件然后将其删除,则此操作在Btrfs文件系统本身中执行,并回收空间。
使用Btrfs,编写和更新大量小文件会导致性能下降。
Btrfs和Docker性能
在btrfs 存储驱动程序下,有几个因素会影响Docker的性能。
**注意**:通过使用Docker卷处理大量写工作负载,而不是依赖于将数据存储在容器的可写层,可以减轻许多这些因素。但是,在Btrfs的情况下,Docker卷仍然受到这些回调的影响,除非/var/lib/docker/volumes/没有得到Btrfs的支持。
-
页面缓存。Btrfs不支持页面缓存共享。这意味着访问同一文件的每个进程都会将该文件复制到Docker主机的内存中。结果,btrfs驱动程序可能不是诸如PaaS之类的高密度用例的最佳选择。
-
小写。容器执行大量小写操作(此使用模式与在短时间内启动和停止许多容器时发生的情况相同)也会导致Btrfs块的使用不佳。这可能会过早填充Btrfs文件系统,并导致Docker主机空间不足。使用btrfs filesys show必须密切监控增加了Btrfs设备上的可用空间量。
-
顺序写入。Btrfs在写入磁盘时使用日记技术。这可能会影响顺序写入的性能,从而使性能降低多达50%。
-
碎片化。碎片是Btrfs等写时复制文件系统的自然副产品。许多小的随机写入可能会使此问题复杂化。使用SSD时,碎片可能表现为CPU峰值,而使用旋转磁盘时,则表现为磁头抖动。这些问题中的任何一个都可能损害性能。
如果Linux内核版本是3.9或更高版本,则autodefrag 在安装Btrfs卷时可以启用该功能。在将该功能部署到生产环境之前,请先对工作负载进行测试,因为某些测试显示了对性能的负面影响。 -
SSD性能:Btrfs包括针对SSD介质的本机优化。要启用这些功能,请使用-o ssdmount选项安装Btrfs文件系统。这些优化通过避免优化(例如不适用于固态介质的寻道优化)来增强SSD的写入性能。
-
经常平衡Btrfs文件系统:cron在非高峰时段,使用操作系统实用程序(例如 作业)定期平衡Btrfs文件系统。这样可以回收未分配的块,并有助于防止文件系统不必要地填满。除非向文件系统添加其他物理块设备,否则无法重新平衡完全完整的Btrfs文件系统。
-
使用快速存储:固态驱动器(SSD)提供比旋转磁盘更快的读写速度。
-
将卷用于繁重的写工作负载:卷可为繁重的写工作负载提供最佳和最可预测的性能。这是因为它们绕过了存储驱动程序,并且不会产生任何精简配置和写时复制所带来的潜在开销。卷还有其他好处,例如,允许在容器之间共享数据,并且即使没有运行中的容器正在使用它们也可以持久保存数据。

















 1504
1504

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









