







(1)冒泡排序
冒泡排序是把小的元素往前调或者把大的元素往后调,比较是相邻的两个元素比较,交换也发生在这两个元素之间,所以相同元素的前后顺序不会改变,所以冒泡排序是一种稳定的排序算法,冒泡排序的最大时间代价、最小时间代价和平均时间代价均为θ(n²)。
void BubbleSort(int array[],int n)
{
for(int i=0;i<n-1;i++)
{
for(int j=n-1;j>i;j--)//每一次遍历后,最小的气泡上升到顶(下标为0)
{
if(array[j]>array[j-1])
swap(array,j,j-1);
}
}
}
void swap(int array[],int i,int j)
{
int temp=array[i];
array[i]=array[j];
array[j]=temp;
}(2)插入排序
插入排序是在一个已经有序的小序列的基础上,一次插入一个元素。当然,刚开始这个有序的小序列只有一个元素,就是第一个元素。比较是从有序序列的末尾开始,也就是想要插入的元素和已经有序的最大者开始比起,如果比它大则直接插入在其后面,否则一直往前找直到找到它该插入的位置。如果碰见一个和插入元素相等的,那么插入元素插入到相等元素的后面,所以插入排序是稳定的。插入排序的最大时间代价为θ(n²),最小时间代价为θ(n),平均时间代价为θ(n²)。
void InsertSort(int array[],int n)
{
for(int i=1;i<n;i++)
{
int key=array[i];
int j=i-1;
while(j>=0&&array[j]>key)
{
array[j+1]=array[j];
j--;
}
array[j+1]=key;
}
}(3)归并排序
归并排序是把序列递归地分成短序列,递归出口是短序列只有一个元素,然后把各个有序的短序列合并成一个有序的长序列,不断合并直到原序列全部排好序。合并过程中我们可以保证如果两个当前元素相等时,我们把处在前面的序列的元素保存在结果序列的前面,这就保证了稳定性。所以,归并排序是稳定的排序算法。归并排序的最大时间代价,最小时间代价和平均时间代价均为θ(n*logn)。
void merge(int array[],int tempArray[],int left,int right,int middle)
{
int index1=left;
int index2=middle+1;
for(int i=left;(index1<=middle)&&(index2<=right);i++)
{
if(array[index1]<=array[index2]
tempArray[i]=array[index1++];
else
tempArray[i]=array[index2++];
}
while(index1<=middle)
tempArray[i++]=array[index1++];
while(index2<=right)
tempArray[i++]=array[indx2++];
for(i=left;i<=rigth;i++)
array[i]=tempArray[i];
}
void MergeSort(int array[],int tempArray[],int left,int right)
{
if(left<right)
{
int middle=(left+right)/2;
MergeSort(array,tempArray,left,middle);
MergeSort(array,tempArray,middle+1,right);
merge(array,tempArray,left,right,middle);
}
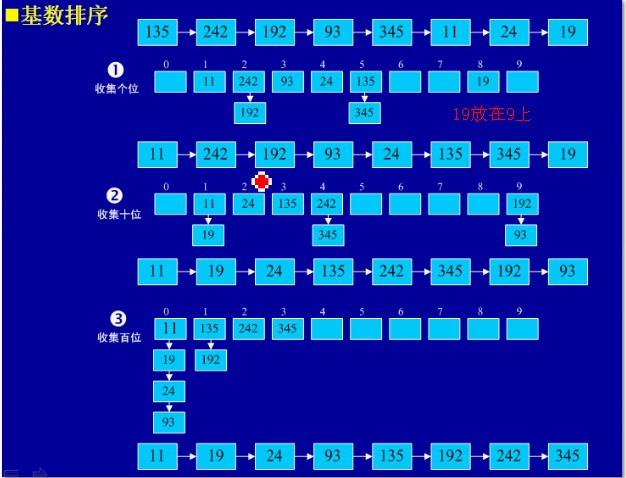
}(4)基数排序
基数排序是按照低位先排序,然后收集;再按照高位排序,然后再收集;以此类推,直到最高位。基数排序是稳定的排序算法。基数排序的时间复杂度为O (nlog(r)m),其中r为所采取的基数,而m为堆数。
int KeySize(int array[],int size)
{
int key_size=1;
for(int i=0;i<size;i++)
{
int temp=1;
int n=10;
while(array[i]/n>0)
{
temp++;
n*=10;
}
key_size=(temp>key_size)?temp:key_size;
}
return key_size;
}
void RadixSort(int array[],int size)
{
int bucket[10][10]={0};
int order[10]={0};
int key_size=KeySize(array,size);
for(int n=1;key_size>0;n*=10,key_size--)
{
for(int i=0;i<size;i++)
{
int lsd=(array[i]/n)%10;
bucket[lsd][order[lsd]]=array[i];
order[lsd]++;
}
int k=0;
for(int i=0;i<10;i++)
{
if(order[i]!=0)
{
for(int j=0;j<order[i];j++)
{
array[k]=bucket[i][j];
k++;
}
order[i]=0;
}
}
}
}
(5)选择排序
选择排序是给每个位置选择当前元素最小的,比如给第一个位置选择最小的,在剩余元素里面给第二个位置选择第二小的,依此类推,知道第n-1个位置,第n个位置不用选择了。那么,在一趟选择,如果当前元素比一个元素小,而该小的元素又出现在一个和当前元素相等的元素后面,那么交换后稳定性就被破坏了。比较拗口,举个例子,序列5 8 5 2 9,我们知道第一遍选择第1个元素5会和2交换,那么原序列中2个5的相对前后顺序就被破坏了,所以选择排序不是一个稳定的排序算法。选择排序的最大时间代价,最小时间代价和平均时间代价均为θ(n²)。
void SelectionSort(int array[],int n)
{
for(int i=0;i<n-1;i++)
{
int smallest=i;
for(int j=i+1;j<n;j++)
{
if(array[smallest]>array[j])
smallest=j;
}
swap(array,i,smallest);
}
}(6)快速排序
快速排序有两个方向,左边的i下标一直往右走,当a[i] <= a[center_index],其中center_index是中枢元素的数组下标,一般取为数组第0个元素。而右边的j下标一直往左走,当a[j] > a[center_index]。如果i和j都走不动了,i <= j,交换a[i]和a[j],重复上面的过程,直到i > j。 交换a[j]和a[center_index],完成一趟快速排序。在中枢元素和a[j]交换的时候,很有可能把前面的元素的稳定性打乱,比如序列为5 3 3 4 3 8 9 10 11,现在中枢元素5和3(第5个元素,下标从1开始计)交换就会把元素3的稳定性打乱,所以快速排序是一个不稳定的排序算法,不稳定发生在中枢元素和a[j] 交换的时刻。
快速排序的最大时间代价为θ(n²),最小时间代价为θ(n*logn),平均时间代价为θ(n*logn)
int Partition(int data[],int length,int start,int end)
{
if(data==NULL||length<=0||start<0||end>=length)
throw new std::exception("Invalid Parameters");
int index=RandomInRange(start,end);
Swap(&data[index],&data[end]);
int small=start-1;
for(index=start;index<end;++index)
{
if(data[index]<data[end])
{
++small;
if(small!=index)
Swap(&data[index],&data[small]);
}
}
++small;
Swap(&data[small],&data[end]);
return small;
}
void QuickSort(int data[],int length,int start,int end)
{
if(start==end)
return;
int index=Partition(data,length,start,end);
if(index>start)
QuickSort(data,length,start,index-1);
if(index<end)
QuickSort(data,length,inex+1,end);
}(7)希尔排序
希尔排序是按照不同步长对元素进行插入排序,当刚开始元素很无序的时候,步长最大,所以插入排序的元素个数很少,速度很快;当元素基本有序了,步长很小, 插入排序对于有序的序列效率很高。所以,希尔排序的时间复杂度会比O(n^2)好一些。由于多次插入排序,我们知道一次插入排序是稳定的,不会改变相同元素的相对顺序,但在不同的插入排序过程中,相同的元素可能在各自的插入排序中移动,最后其稳定性就会被打乱,所以shell排序是不稳定的。
希尔排序的最大时间代价为O(n²),最小时间代价为O(n),平均时间代价为O(n1.3)。
void ShellSort(int array[],int n)
{
int j,temp,d;
d=n/2;
while(d>0)
{
for(int i=d;i<n;i++)
{
temp=array[i];
j=i-d;
while(j>=0&&array[j]>temp)
{
array[j+d]=array[j];
j-=d;
}
array[j+d]=temp;
}
d/=2;
}
}(8)堆排序
堆排序的最大时间代价,最小时间代价和平均时间代价均为θ(n*logn)。堆排序和归并排序一样,不依赖于原始数组的有序程度。
HeapSort.cpp
#include <iostream>
#include "MaxHeap.h"
using namespace std;
/*最大堆排序函数*/
void heapSort(int array[],int n)
{
MaxHeap max_heap=MaxHeap(array,n);
/*删除堆的最大值(堆顶),即每次将最大值与数组的最后一个元素交换位置*/
for(int i=0;i<n;i++)
max_heap.removeMax();
}
int main()
{
int array[8]={4,3,7,1,2,8,5,6};
heapSort(array,8);
for(int i=0;i<8;i++)
cout<<array[i]<<" ";
cout<<endl;
return 0;
} MaxHeap.h
#include <iostream>
using namespace std;
/*最大堆定义*/
class MaxHeap
{
private:
int size; //最大堆的元素数目
int * array; //最大堆数组的首地址指针
public:
MaxHeap(int array[],int n); //用已有数组初始化一个最大堆
void buildHeap(); //构建最大堆
void siftDown(int index); //向下筛选法
void swap(int index1,int index2); //交换位置为index1与index2的元素
void removeMax(); //删除堆顶的最大值--与数组最后一个元素交换位置并重新构建最大堆
int leftChild(int index); //返回左孩子的位置
int rightChild(int index); //返回右孩子的位置
}; MaxHeap.cpp
#include <iostream>
#include "MaxHeap.h"
using namespace std;
/*最大堆成员函数实现*/
MaxHeap::MaxHeap(int array[],int n)
{
this->array=array;
size=n;
buildHeap();
}
void MaxHeap::buildHeap()
{
for(int i=size/2-1;i>=0;i--)
siftDown(i);
}
void MaxHeap::siftDown(int index)
{
int max_index=leftChild(index);
while(max_index<size)
{
if(max_index<size-1&&array[rightChild(index)]>array[max_index])
max_index++;
if(array[index]>array[max_index])
break;
swap(index,max_index);
index=max_index;
max_index=leftChild(index);
}
}
void MaxHeap::swap(int index1,int index2)
{
int temp=array[index1];
array[index1]=array[index2];
array[index2]=temp;
}
void MaxHeap::removeMax()
{
swap(0,size-1);
size--;
siftDown(0);
}
int MaxHeap::leftChild(int index)
{
return index*2+1;
}
int MaxHeap::rightChild(int index)
{
return index*2+2;
} 















 11万+
11万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









