







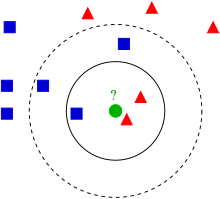
下图中,绿色圆要被决定赋予哪个类,是红色三角形还是蓝色四方形?如果K=3,由于红色三角形所占比例为2/3,绿色圆将被赋予红色三角形那个类,如果K=5,由于蓝色四方形比例为3/5,因此绿色圆被赋予蓝色四方形类。
K 最近邻 (k-Nearest Neighbor,KNN) 分类算法,是一个理论上比较成熟的方法,也是最简单的机器学习算法之一,1968年由 Cover 和 Hart 提出。该方法的思路是:如果一个样本在特征空间中的 k 个最相似即特征空间中最邻近)的样本中的大多数属于某一个类别,则该样本也属于这个类别。KNN 算法中,所选择的邻居都是已经正确分类的对象。该方法在分类决策上只依据最邻近的一个或者几个样本的类别来决定待分样本所属的类别。 K 最近邻 (k-Nearest Neighbor,KNN) 分类算法,是一个理论上比较成熟的方法,也是最简单的机器学习算法之一。该方法的思路是:如果一个样本在特征空间中的 k 个最相似即特征空间中最邻近)的样本中的大多数属于某一个类别,则该样本也属于这个类别。KNN 算法中,所选择的邻居都是已经正确分类的对象。该方法在分类决策上只依据最邻近的一个或者几个样本的类别来决定待分样本所属的类别。
KNN 算法本身简单有效,它是一种 lazy-learning 算法,分类器不需要使用训练集进行训练,训练时间复杂度为0。KNN 分类的计算复杂度和训练集中的文档数目成正比,也就是说,如果训练集中文档总数为 n,那么 KNN 的分类时间复杂度为O(n)。
KNN 方法虽然从原理上也依赖于极限定理,但在类别决策时,只与极少量的相邻样本有关。由于 KNN 方法主要靠周围有限的邻近的样本,而不是靠判别类域的方法来确定所属类别的,因此对于类域的交叉或重叠较多的待分样本集来说,KNN 方法较其他方法更为适合。
K 近邻算法使用的模型实际上对应于对特征空间的划分。K 值的选择,距离度量和分类决策规则是该算法的三个基本要素:
- K 值的选择会对算法的结果产生重大影响。K值较小意味着只有与输入实例较近的训练实例才会对预测结果起作用,但容易发生过拟合;如果 K 值较大,优点是可以减少学习的估计误差,但缺点是学习的近似误差增大,这时与输入实例较远的训练实例也会对预测起作用,是预测发生错误。在实际应用中,K 值一般选择一个较小的数值,通常采用交叉验证的方法来选择最有的 K 值。随着训练实例数目趋向于无穷和 K=1 时,误差率不会超过贝叶斯误差率的2倍,如果K也趋向于无穷,则误差率趋向于贝叶斯误差率。
- 该算法中的分类决策规则往往是多数表决,即由输入实例的 K 个最临近的训练实例中的多数类决定输入实例的类别
- 距离度量一般采用 Lp 距离,当p=2时,即为欧氏距离,在度量之前,应该将每个属性的值规范化,这样有助于防止具有较大初始值域的属性比具有较小初始值域的属性的权重过大。
该算法在分类时有个主要的不足是,当样本不平衡时,如一个类的样本容量很大,而其他类样本容量很小时,有可能导致当输入一个新样本时,该样本的 K 个邻居中大容量类的样本占多数。 该算法在分类时有个主要的不足是,当样本不平衡时,如一个类的样本容量很大,而其他类样本容量很小时,有可能导致当输入一个新样本时,该样本的 K 个邻居中大容量类的样本占多数。
该算法只计算“最近的”邻居样本,某一类的样本数量很大,那么或者这类样本并不接近目标样本,或者这类样本很靠近目标样本。无论怎样,数量并不能影响运行结果。可以采用权值的方法(和该样本距离小的邻居权值大)来改进。该方法的另一个不足之处是计算量较大,因为对每一个待分类的文本都要计算它到全体已知样本的距离,才能求得它的 K 个最近邻点。目前常用的解决方法是事先对已知样本点进行剪辑,事先去除对分类作用不大的样本。该算法比较适用于样本容量比较大的类域的自动分类,而那些样本容量较小的类域采用这种算法比较容易产生误分。该算法只计算“最近的”邻居样本,某一类的样本数量很大,那么或者这类样本并不接近目标样本,或者这类样本很靠近目标样本。无论怎样,数量并不能影响运行结果。可以采用权值的方法(和该样本距离小的邻居权值大)来改进。该方法的另一个不足之处是计算量较大,因为对每一个待分类的文本都要计算它到全体已知样本的距离,才能求得它的 K 个最近邻点。目前常用的解决方法是事先对已知样本点进行剪辑,事先去除对分类作用不大的样本。该算法比较适用于样本容量比较大的类域的自动分类,而那些样本容量较小的类域采用这种算法比较容易产生误分。
KNN 算法不仅可以用于分类,还可以用于回归。通过找出一个样本的 K 个最近邻居,将这些邻居的属性的平均值赋给该样本,就可以得到该样本的属性。更有用的方法是将不同距离的邻居对该样本产生的影响给予不同的权值(weight),如权值与距离成正比。
实现 K 近邻算法时,主要考虑的问题是如何对训练数据进行快速 K 近邻搜索,这在特征空间维数大及训练数据容量大时非常必要。
最近邻搜索:Nearest Neighbor Search

在进行图像搜索时,要求系统返回与查询图片相似的图像集,这里头涉及高维空间的数据查询问题。排序和寻找是计算机技术的基础算法,最基本的是对一维数组排序和在一维数组中寻找元素。在图像检索系统中面对的是大规模的高维数据,对查询算法的效率要求更高,这里介绍是一种基本的查询算法--最近邻(Nearest Neighbor )或K近邻(KNN)。 最近邻搜索(Nearest Neighbor Search):最近邻查询是最重要的空间查询之一,也是文本着重考虑的类型。其定义是:给定一个查询点q和一个距离度量(有欧几里德距离、曼哈顿距离等),一个最近邻查询找出一个离查询点q最近的空间数据对象。它的一般化形式为k(k>=1)最近邻查询,定义为:给定一个查询点q,一个正整数k以及一个距离度量,则一个k最邻近查询找出k个离q最近的空间数据对象。如上图所示,查询对象q的k邻近1NN(q)={a},4NN(q)={a,b,c,d}。
最近邻搜索(Nearest Neighbor Search):最近邻查询是最重要的空间查询之一,也是文本着重考虑的类型。其定义是:给定一个查询点q和一个距离度量(有欧几里德距离、曼哈顿距离等),一个最近邻查询找出一个离查询点q最近的空间数据对象。它的一般化形式为k(k>=1)最近邻查询,定义为:给定一个查询点q,一个正整数k以及一个距离度量,则一个k最邻近查询找出k个离q最近的空间数据对象。如上图所示,查询对象q的k邻近1NN(q)={a},4NN(q)={a,b,c,d}。
 最近邻规则也是一种分类方法,如上图中,绿色圆要被决定赋予哪个类,是红色三角形还是蓝色四方形?如果K=3,由于红色三角形所占比例为2/3,绿色圆将被赋予红色三角形那个类,如果K=5,由于蓝色四方形比例为3/5,因此绿色圆被赋予蓝色四方形类。
最近邻规则也是一种分类方法,如上图中,绿色圆要被决定赋予哪个类,是红色三角形还是蓝色四方形?如果K=3,由于红色三角形所占比例为2/3,绿色圆将被赋予红色三角形那个类,如果K=5,由于蓝色四方形比例为3/5,因此绿色圆被赋予蓝色四方形类。
 用原始的穷举法可实现最近邻查询,结果如上图(K=3),Matlab代码如下:
用原始的穷举法可实现最近邻查询,结果如上图(K=3),Matlab代码如下:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
|
function
knn_2d_demo()
% KNN 2D Demo
dim = 2;
num = 40;
X = randi(100,num,dim);
Q = randi(100,1,dim);
K = 3;
[indexs distances] = KNNS(X,Q,K);
figure
hold on
plot(X(:,1),X(:,2),
'b.'
)
plot(X(indexs,1),X(indexs,2),
'ro'
)
plot(Q(1),Q(2),
'g*'
)
plot(Q(1),Q(2),
'co'
,
'MarkerSize'
,ceil(distances(K))*6)
hold off
function
[indexs distances] = KNNS(X,Q,K)
% X -- 数据点集 N×D
% Q -- 查询数据 N×D
% K -- 查询近邻数
% indexs -- KNN 点集索引
% distances -- 查询点同KNN点的距离
[n,dim] = size(X);
query_mat = repmat(Q,n,1);
dist_list = sqrt(
sum
((X - query_mat).^2,2));
[value, index] =
sort
(dist_list);
indexs = index(1:K);
distances = value(1:K);
|
当数据点数目增大时,穷举法的计算量会以指数级别增长。1977年Friedman提出的k-d树快速搜索算法[Friedman & Bentley s.t. '77]可以快速找到最近邻,但当特征点描述符多于10维时其效率就很低,并不比穷举法效率高。1997年Beis和Lowe提出了一种近似算法称为Best-Bin-First(BBF)[Beis & Lowe'99] ,这种近似算法能够以很高的概率找到最近邻点。
k-d树(K-dimension tree)是二叉检索树的扩展,k-d tree的每一层将空间分成两个。树的顶层结点按一维进行划分,下一层结点按另一维进行划分,以此类推,各个维循环往复。划分要使得在每个结点,存储在子树中大约一半的点落入一侧,而另一半落入另一侧。
 参照上图,用二维(K=2)数据的实例来说明K-D Tree的建立:
参照上图,用二维(K=2)数据的实例来说明K-D Tree的建立:
1. 根结点选择:将数据按x维排序,以中值所在数据点(5,8)作为根结点,然后以此结点为参考作第一次分裂;
注意,这里涉及两种基本操作:
(1)选择分裂(split)的维度,即在哪一维数据上将原数据分为两半,有两种做法:
一是取 当前层数n mod 数据维数K:如第一层时,n = 0,n mod K = 0,即在第一维数据上寻找分裂点。
二是取 方差最大的那维数据,即在各维数据上分别计算方差,方差最大者数据越分散,故在该维数据上寻找分裂点。
(2)在分裂维度上选择分裂点:通常是取该数据的中值点。
2. 分裂:(父)根结点p的分裂维split_dim = 0,即在x维上分裂,第split_dim分量小于p[split_dim]的放于左侧,否之放在右侧。对左右侧分别确定分裂维、分裂点,循环,直至最后。















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









