







Linux-进程的管理与调度1(基于6.1内核)---进程描述符
一、前言
进程是处于执行期的程序以及它所管理的资源的总称。注意,程序并不是进程,实际上两个/多个进程不仅有可能执行同一程序,而且还有可能共享地址空间等资源。
Linux内核通过一个被称为进程描述符的 struct task_struct{...}结构体来管理进程,这个结构体包含了一个进程所需的所有信息。定义在include/linux/sched.h。
二、进程的状态
unsigned int __state;成员的可能取值如下include/linux/sched.h。
#define TASK_RUNNING 0x00000000
#define TASK_INTERRUPTIBLE 0x00000001
#define TASK_UNINTERRUPTIBLE 0x00000002
#define __TASK_STOPPED 0x00000004
#define __TASK_TRACED 0x00000008
/* Used in tsk->exit_state: */
#define EXIT_DEAD 0x00000010
#define EXIT_ZOMBIE 0x00000020
#define EXIT_TRACE (EXIT_ZOMBIE | EXIT_DEAD)
/* Used in tsk->__state again: */
#define TASK_PARKED 0x00000040
#define TASK_DEAD 0x00000080
#define TASK_WAKEKILL 0x00000100
#define TASK_WAKING 0x00000200
#define TASK_NOLOAD 0x00000400
#define TASK_NEW 0x00000800
#define TASK_RTLOCK_WAIT 0x00001000
#define TASK_FREEZABLE 0x00002000
#define __TASK_FREEZABLE_UNSAFE (0x00004000 * IS_ENABLED(CONFIG_LOCKDEP))
#define TASK_FROZEN 0x00008000
#define TASK_STATE_MAX 0x00010000
#define TASK_ANY (TASK_STATE_MAX-1)
/*
* DO NOT ADD ANY NEW USERS !
*/
#define TASK_FREEZABLE_UNSAFE (TASK_FREEZABLE | __TASK_FREEZABLE_UNSAFE)
/* Convenience macros for the sake of set_current_state: */
#define TASK_KILLABLE (TASK_WAKEKILL | TASK_UNINTERRUPTIBLE)
#define TASK_STOPPED (TASK_WAKEKILL | __TASK_STOPPED)
#define TASK_TRACED __TASK_TRACED
#define TASK_IDLE (TASK_UNINTERRUPTIBLE | TASK_NOLOAD)
/* Convenience macros for the sake of wake_up(): */
#define TASK_NORMAL (TASK_INTERRUPTIBLE | TASK_UNINTERRUPTIBLE)
/* get_task_state(): */
#define TASK_REPORT (TASK_RUNNING | TASK_INTERRUPTIBLE | \
TASK_UNINTERRUPTIBLE | __TASK_STOPPED | \
__TASK_TRACED | EXIT_DEAD | EXIT_ZOMBIE | \
TASK_PARKED)state域能够取5个互为排斥的值(通俗一点就是这五个值任意两个不能一起使用,只能单独使用)。系统中的每个进程都必然处于以上所列进程状态中的一种。
| 状态 | 描述 |
|---|---|
| TASK_RUNNING | 表示进程要么正在执行,要么正要准备执行(已经就绪),正在等待cpu时间片的调度 |
| TASK_INTERRUPTIBLE | 进程因为等待一些条件而被挂起(阻塞)而所处的状态。这些条件主要包括:硬中断、资源、一些信号……,一旦等待的条件成立,进程就会从该状态(阻塞)迅速转化成为就绪状态TASK_RUNNING |
| TASK_UNINTERRUPTIBLE | 意义与TASK_INTERRUPTIBLE类似,除了不能通过接受一个信号来唤醒以外,对于处于TASK_UNINTERRUPIBLE状态的进程,哪怕我们传递一个信号或者有一个外部中断都不能唤醒他们。只有它所等待的资源可用的时候,他才会被唤醒。这个标志很少用,但是并不代表没有任何用处,其实他的作用非常大,特别是对于驱动刺探相关的硬件过程很重要,这个刺探过程不能被一些其他的东西给中断,否则就会让进城进入不可预测的状态 |
| TASK_STOPPED | 进程被停止执行,当进程接收到SIGSTOP、SIGTTIN、SIGTSTP或者SIGTTOU信号之后就会进入该状态 |
| TASK_TRACED | 表示进程被debugger等进程监视,进程执行被调试程序所停止,当一个进程被另外的进程所监视,每一个信号都会让进城进入该状态 |
还有两个附加的进程状态既可以被添加到state域中,又可以被添加exit_state。只有当进程终止的时候,才会达到这两种状态.
/* task state */
int exit_state;
int exit_code;
int exit_signal;| 状态 | 描述 |
|---|---|
| EXIT_ZOMBIE | 进程的执行被终止,但是其父进程还没有使用wait()等系统调用来获知它的终止信息,此时进程成为僵尸进程 |
| EXIT_DEAD | 进程的最终状态 |
新增睡眠状态
如前所述,进程状态 TASK_UNINTERRUPTIBLE 和 TASK_INTERRUPTIBLE 都是睡眠状态。现在,我们来看看内核如何将进程置为睡眠状态。
Linux 内核提供了两种方法将进程置为睡眠状态。
将进程置为睡眠状态的普通方法是将进程状态设置为 TASK_INTERRUPTIBLE 或 TASK_UNINTERRUPTIBLE 并调用调度程序的 schedule() 函数。这样会将进程从 CPU 运行队列中移除。
第一,如果进程处于可中断模式的睡眠状态(通过将其状态设置为 TASK_INTERRUPTIBLE),那么可以通过显式的唤醒呼叫(wakeup_process())或需要处理的信号来唤醒它。
第二,如果进程处于非可中断模式的睡眠状态(通过将其状态设置为 TASK_UNINTERRUPTIBLE),那么只能通过显式的唤醒呼叫将其唤醒。除非万不得已,否则我们建议您将进程置为可中断睡眠模式,而不是不可中断睡眠模式(比如说在设备 I/O 期间,处理信号非常困难时)。
当处于可中断睡眠模式的任务接收到信号时,它需要处理该信号(除非它已被屏弊),离开之前正在处理的任务(此处需要清除代码),并将 -EINTR 返回给用户空间。再一次,检查这些返回代码和采取适当操作的工作将由程序员完成。
因此,将进程置为不可中断模式的睡眠状态,因为信号不会唤醒这类任务。
但需要注意的一种情况是,对不可中断睡眠模式的进程的唤醒呼叫可能会由于某些原因不会发生,这会使进程无法被终止,从而最终引发问题,因为唯一的解决方法就是重启系统。
现在,我们在内核中实现了一种新的睡眠方法
后续Kernel的版本引入了一种新的进程睡眠状态,
| 状态 | 描述 |
|---|---|
| TASK_KILLABLE | 当进程处于这种可以终止的新睡眠状态中,它的运行原理类似于 TASK_UNINTERRUPTIBLE,只不过可以响应致命信号 |
它定义如下:
#define TASK_WAKEKILL 0x00000100
#define TASK_KILLABLE (TASK_WAKEKILL | TASK_UNINTERRUPTIBLE)
#define TASK_STOPPED (TASK_WAKEKILL | __TASK_STOPPED)
#define TASK_TRACED (TASK_WAKEKILL | __TASK_TRACED)换句话说,TASK_UNINTERRUPTIBLE + TASK_WAKEKILL = TASK_KILLABLE。
而TASK_WAKEKILL 用于在接收到致命信号时唤醒进程
新的睡眠状态允许 TASK_UNINTERRUPTIBLE 响应致命信号
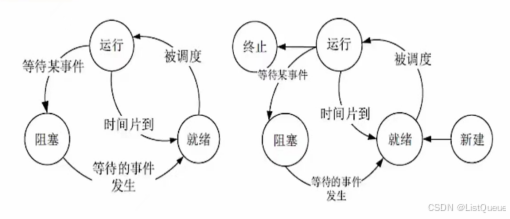
进程状态的切换过程和原因大致如下图

三、进程标识符PID
pid_t pid;
pid_t tgid; Unix系统通过pid来标识进程,linux把不同的pid与系统中每个进程或轻量级线程关联,而unix程序员希望同一组线程具有共同的pid,遵照这个标准linux引入线程组的概念。一个线程组所有线程与领头线程具有相同的pid,存入tgid字段,getpid()返回当前进程的tgid值而不是pid的值。
在CONFIG_BASE_SMALL配置为0的情况下,PID的取值范围是0到32767,即系统中的进程数最大为32768个。
#define PID_MAX_DEFAULT (CONFIG_BASE_SMALL ? 0x1000 : 0x8000) 定义的文件:include/linux/threads.h
在Linux系统中,一个线程组中的所有线程使用和该线程组的领头线程(该组中的第一个轻量级进程)相同的PID,并被存放在tgid成员中。只有线程组的领头线程的pid成员才会被设置为与tgid相同的值。注意,getpid()系统调用返回的是当前进程的tgid值而不是pid值。
四、进程内核栈
4.1、内核栈与线程描述符
对每个进程,Linux内核都把两个不同的数据结构紧凑的存放在一个单独为进程分配的内存区域中
1.是内核态的进程堆栈,
2.是紧挨着进程描述符的小数据结构thread_info,叫做线程描述符。
Linux把thread_info(线程描述符)和内核态的线程堆栈存放在一起,这块区域通常是8192K(占两个页框),其实地址必须是8192的整数倍。
在linux/arch/x86/include/asm/page_32_types.h中,
#define THREAD_SIZE_ORDER 1
#define THREAD_SIZE (PAGE_SIZE << THREAD_SIZE_ORDER)
#define IRQ_STACK_SIZE THREAD_SIZE出于效率考虑,内核让这8K空间占据连续的两个页框并让第一个页框的起始地址是213的倍数。
内核态的进程访问处于内核数据段的栈,这个栈不同于用户态的进程所用的栈。
用户态进程所用的栈,是在进程线性地址空间中;
而内核栈是当进程从用户空间进入内核空间时,特权级发生变化,需要切换堆栈,那么内核空间中使用的就是这个内核栈。因为内核控制路径使用很少的栈空间,所以只需要几千个字节的内核态堆栈。
内核态堆栈仅用于内核例程,Linux内核另外为中断提供了单独的硬中断栈和软中断栈。
下图中显示了在物理内存中存放两种数据结构的方式。线程描述符驻留与这个内存区的开始,而栈顶末端向下增长。
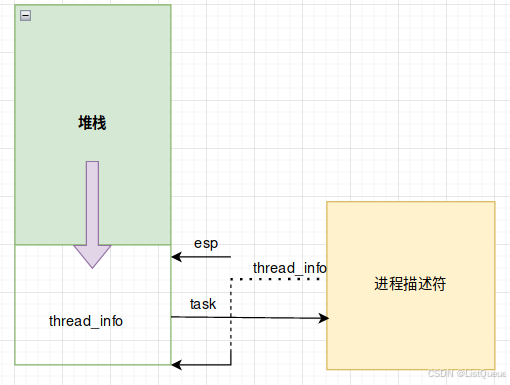
在kernel 6.1内核代码中,进程描述符task_struct结构中没有直接指向thread_info结构的指针,而是用一个void指针类型的成员表示,然后通过类型转换来访问thread_info结构。定义在:include/linux/sched.h
#ifdef CONFIG_THREAD_INFO_IN_TASK
# define task_thread_info(task) (&(task)->thread_info)
#elif !defined(__HAVE_THREAD_FUNCTIONS)
# define task_thread_info(task) ((struct thread_info *)(task)->stack)
#endif在这个图中,esp寄存器是CPU栈指针,用来存放栈顶单元的地址。栈起始于顶端,并朝着这个内存区开始的方向增长。从用户态刚切换到内核态以后,进程的内核栈总是空的。因此,esp寄存器指向这个栈的顶端。一旦数据写入堆栈,esp的值就递减。
4.2、内核栈数据结构描述
thread_info是体系结构相关的,结构的定义include/linux/thread_info.h
Linux内核中使用一个联合体来表示一个进程的线程描述符和内核栈:
union thread_union
{
struct thread_info thread_info;
unsigned long stack[THREAD_SIZE/sizeof(long)];
};4.3、运行进程的thread_info
下面来说说如何通过esp栈指针来获取当前在CPU上正在运行进程的thread_info结构。
thread_info结构和内核态堆栈是紧密结合在一起的,占据两个页框的物理内存空间。而且,这两个页框的起始起始地址是213对齐的。
进程最常用的是进程描述符结构task_struct而不是thread_info结构的地址。为了获取当前CPU上运行进程的task_struct结构,内核提供了current宏,由于task_struct *task在thread_info的起始位置,该宏本质上等价于current_thread_info()->task,定义在:include/asm-generic/current.h。
#ifndef __ASSEMBLY__
#include <linux/thread_info.h>
#define get_current() (current_thread_info()->task)
#define current get_current()
#endif4.4、分配和销毁thread_info
在 Linux 6.x 内核版本中,并没有直接定义 alloc_thread_info() 和 free_thread_info() 这两个函数,实际上,Linux 内核并没有暴露这样直接的 API 来进行 thread_info 的分配和释放,而是通过其他机制间接进行这些操作。
内核栈分配和初始化的过程如下:
task->stack = alloc_stack(); // 分配栈空间
task->thread_info = (struct thread_info *)(task->stack + STACK_SIZE); // 设置 thread_info 在栈底部在线程结束时,内核会释放该线程的栈空间和与之相关的 thread_info。在 exit_thread() 或线程终止时,内核会清理栈,并将其与任务(task_struct)一同销毁。
free_stack(task->stack); // 释放栈空间
五、进程标识
unsigned int flags; /* per process flags, defined below */ 反应进程状态的信息,但不是运行状态,用于内核识别进程当前的状态,以备下一步操作
flags成员的可能取值如下,这些宏以PF(ProcessFlag)开头
/*
* Per process flags
*/
#define PF_VCPU 0x00000001 /* I'm a virtual CPU */
#define PF_IDLE 0x00000002 /* I am an IDLE thread */
#define PF_EXITING 0x00000004 /* Getting shut down */
#define PF_POSTCOREDUMP 0x00000008 /* Coredumps should ignore this task */
#define PF_IO_WORKER 0x00000010 /* Task is an IO worker */
#define PF_WQ_WORKER 0x00000020 /* I'm a workqueue worker */
#define PF_FORKNOEXEC 0x00000040 /* Forked but didn't exec */
#define PF_MCE_PROCESS 0x00000080 /* Process policy on mce errors */
#define PF_SUPERPRIV 0x00000100 /* Used super-user privileges */
#define PF_DUMPCORE 0x00000200 /* Dumped core */
#define PF_SIGNALED 0x00000400 /* Killed by a signal */
#define PF_MEMALLOC 0x00000800 /* Allocating memory */
#define PF_NPROC_EXCEEDED 0x00001000 /* set_user() noticed that RLIMIT_NPROC was exceeded */
#define PF_USED_MATH 0x00002000 /* If unset the fpu must be initialized before use */
#define PF_USER_WORKER 0x00004000 /* Kernel thread cloned from userspace thread */
#define PF_NOFREEZE 0x00008000 /* This thread should not be frozen */
#define PF__HOLE__00010000 0x00010000
#define PF_KSWAPD 0x00020000 /* I am kswapd */
#define PF_MEMALLOC_NOFS 0x00040000 /* All allocation requests will inherit GFP_NOFS */
#define PF_MEMALLOC_NOIO 0x00080000 /* All allocation requests will inherit GFP_NOIO */
#define PF_LOCAL_THROTTLE 0x00100000 /* Throttle writes only against the bdi I write to,
* I am cleaning dirty pages from some other bdi. */
#define PF_KTHREAD 0x00200000 /* I am a kernel thread */
#define PF_RANDOMIZE 0x00400000 /* Randomize virtual address space */
#define PF__HOLE__00800000 0x00800000
#define PF__HOLE__01000000 0x01000000
#define PF__HOLE__02000000 0x02000000
#define PF_NO_SETAFFINITY 0x04000000 /* Userland is not allowed to meddle with cpus_mask */
#define PF_MCE_EARLY 0x08000000 /* Early kill for mce process policy */
#define PF_MEMALLOC_PIN 0x10000000 /* Allocation context constrained to zones which allow long term pinning. */
#define PF__HOLE__20000000 0x20000000
#define PF__HOLE__40000000 0x40000000
#define PF_SUSPEND_TASK 0x80000000 /* This thread called freeze_processes() and should not be frozen */
六、进程亲属成员
继续include/linux/sched.h中的
/*
* Pointers to the (original) parent process, youngest child, younger sibling,
* older sibling, respectively. (p->father can be replaced with
* p->real_parent->pid)
*/
/* Real parent process: */
struct task_struct __rcu *real_parent;
/* Recipient of SIGCHLD, wait4() reports: */
struct task_struct __rcu *parent;
/*
* Children/sibling form the list of natural children:
*/
struct list_head children;
struct list_head sibling;
struct task_struct *group_leader;在Linux系统中,所有进程之间都有着直接或间接地联系,每个进程都有其父进程,也可能有零个或多个子进程。拥有同一父进程的所有进程具有兄弟关系。
| 字段 | 描述 |
|---|---|
| real_parent | 指向其父进程,如果创建它的父进程不再存在,则指向PID为1的init进程 |
| parent | 指向其父进程,当它终止时,必须向它的父进程发送信号。它的值通常与real_parent相同 |
| children | 表示链表的头部,链表中的所有元素都是它的子进程 |
| sibling | 用于把当前进程插入到兄弟链表中 |
| group_leader | 指向其所在进程组的领头进程 |
七、ptrace系统调用
Ptrace 提供了一种父进程可以控制子进程运行,并可以检查和改变它的核心image。
它主要用于实现断点调试。一个被跟踪的进程运行中,直到发生一个信号。则进程被中止,并且通知其父进程。在进程中止的状态下,进程的内存空间可以被读写。父进程还可以使子进程继续执行,并选择是否是否忽略引起中止的信号。
unsigned int ptrace;
...
/*
* 'ptraced' is the list of tasks this task is using ptrace() on.
*
* This includes both natural children and PTRACE_ATTACH targets.
* 'ptrace_entry' is this task's link on the p->parent->ptraced list.
*/
struct list_head ptraced;
struct list_head ptrace_entry;
...
/* Ptrace state: */
unsigned long ptrace_message;
kernel_siginfo_t *last_siginfo;成员ptrace被设置为0时表示不需要被跟踪,它的可能取值如下:include/linux/ptrace.h
/*
* Ptrace flags
*
* The owner ship rules for task->ptrace which holds the ptrace
* flags is simple. When a task is running it owns it's task->ptrace
* flags. When the a task is stopped the ptracer owns task->ptrace.
*/
#define PT_SEIZED 0x00010000 /* SEIZE used, enable new behavior */
#define PT_PTRACED 0x00000001
#define PT_OPT_FLAG_SHIFT 3
/* PT_TRACE_* event enable flags */
#define PT_EVENT_FLAG(event) (1 << (PT_OPT_FLAG_SHIFT + (event)))
#define PT_TRACESYSGOOD PT_EVENT_FLAG(0)
#define PT_TRACE_FORK PT_EVENT_FLAG(PTRACE_EVENT_FORK)
#define PT_TRACE_VFORK PT_EVENT_FLAG(PTRACE_EVENT_VFORK)
#define PT_TRACE_CLONE PT_EVENT_FLAG(PTRACE_EVENT_CLONE)
#define PT_TRACE_EXEC PT_EVENT_FLAG(PTRACE_EVENT_EXEC)
#define PT_TRACE_VFORK_DONE PT_EVENT_FLAG(PTRACE_EVENT_VFORK_DONE)
#define PT_TRACE_EXIT PT_EVENT_FLAG(PTRACE_EVENT_EXIT)
#define PT_TRACE_SECCOMP PT_EVENT_FLAG(PTRACE_EVENT_SECCOMP)
#define PT_EXITKILL (PTRACE_O_EXITKILL << PT_OPT_FLAG_SHIFT)
#define PT_SUSPEND_SECCOMP (PTRACE_O_SUSPEND_SECCOMP << PT_OPT_FLAG_SHIFT)八、Performance Event
继续include/linux/sched.h中的
Performance Event是一款随 Linux 内核代码一同发布和维护的性能诊断工具。这些成员用于帮助PerformanceEvent分析进程的性能问题。
#ifdef CONFIG_PERF_EVENTS
struct perf_event_context *perf_event_ctxp;
struct mutex perf_event_mutex;
struct list_head perf_event_list;
#endif九、进程调度
9.1、优先级
继续include/linux/sched.h中的
int prio;
int static_prio;
int normal_prio;
unsigned int rt_priority;| 字段 | 描述 |
|---|---|
| static_prio | 用于保存静态优先级,可以通过nice系统调用来进行修改 |
| rt_priority | 用于保存实时优先级 |
| normal_prio | 的值取决于静态优先级和调度策略 |
| prio | 用于保存动态优先级 |
实时优先级范围是0到MAX_RT_PRIO-1(即99),而普通进程的静态优先级范围是从MAX_RT_PRIO到MAX_PRIO-1(即100到139)。值越大静态优先级越低。
#define MAX_RT_PRIO 100
#define MAX_PRIO (MAX_RT_PRIO + NICE_WIDTH)
#define DEFAULT_PRIO (MAX_RT_PRIO + NICE_WIDTH / 2)9.2、调度策略相关字段
继续include/linux/sched.h中的
unsigned int policy;
struct sched_rt_entity rt;
struct sched_dl_entity dl;
const struct sched_class *sched_class;| 字段 | 描述 |
|---|---|
| policy | 调度策略 |
| sched_class | 调度类 |
| se | 普通进程的调用实体,每个进程都有其中之一的实体 |
| rt | 实时进程的调用实体,每个进程都有其中之一的实体 |
| cpus_allowed | 用于控制进程可以在哪里处理器上运行 |
9.3、调度策略
policy表示进程的调度策略,目前主要有以下五种:include/uapi/linux/sched.h
/*
* Scheduling policies
*/
#define SCHED_NORMAL 0
#define SCHED_FIFO 1
#define SCHED_RR 2
#define SCHED_BATCH 3
/* SCHED_ISO: reserved but not implemented yet */
#define SCHED_IDLE 5
#define SCHED_DEADLINE 6| 字段 | 描述 | 所在调度器类 |
|---|---|---|
| SCHED_NORMAL | (也叫SCHED_OTHER)用于普通进程,通过CFS调度器实现。SCHED_BATCH用于非交互的处理器消耗型进程。SCHED_IDLE是在系统负载很低时使用 | CFS |
| SCHED_BATCH | SCHED_NORMAL普通进程策略的分化版本。采用分时策略,根据动态优先级(可用nice()API设置),分配 CPU 运算资源。注意:这类进程比上述两类实时进程优先级低,换言之,在有实时进程存在时,实时进程优先调度。但针对吞吐量优化 | CFS |
| SCHED_IDLE | 优先级最低,在系统空闲时才跑这类进程(如利用闲散计算机资源跑地外文明搜索,蛋白质结构分析等任务,是此调度策略的适用者) | CFS |
| SCHED_FIFO | 先入先出调度算法(实时调度策略),相同优先级的任务先到先服务,高优先级的任务可以抢占低优先级的任务 | RT |
| SCHED_RR | 轮流调度算法(实时调度策略),后 者提供 Roound-Robin 语义,采用时间片,相同优先级的任务当用完时间片会被放到队列尾部,以保证公平性,同样,高优先级的任务可以抢占低优先级的任务。不同要求的实时任务可以根据需要用sched_setscheduler()API 设置策略 | RT |
| SCHED_DEADLINE | 新支持的实时进程调度策略,针对突发型计算,且对延迟和完成时间高度敏感的任务适用。基于Earliest Deadline First (EDF) 调度算法 |
9.4、调度类
sched_class结构体表示调度类,目前内核中有实现以下四种:kernel/sched/sched.h
extern const struct sched_class stop_sched_class;
extern const struct sched_class dl_sched_class;
extern const struct sched_class rt_sched_class;
extern const struct sched_class fair_sched_class;
extern const struct sched_class idle_sched_class;目前系統中,Scheduling Class的优先级顺序为StopTask > RealTime > Fair > IdleTask
十、进程地址空间
struct mm_struct *active_mm;
...
/* per-thread vma caching */
u32 vmacache_seqnum;
struct vm_area_struct *vmacache[VMACACHE_SIZE];
#if defined(SPLIT_RSS_COUNTING)
struct task_rss_stat rss_stat;
#endif
#ifdef CONFIG_COMPAT_BRK
unsigned brk_randomized:1;
#endif| 字段 | 描述 |
|---|---|
| mm | 进程所拥有的用户空间内存描述符,内核线程无的mm为NULL |
| active_mm | active_mm指向进程运行时所使用的内存描述符, 对于普通进程而言,这两个指针变量的值相同。但是内核线程kernel thread是没有进程地址空间的,所以内核线程的tsk->mm域是空(NULL)。但是内核必须知道用户空间包含了什么,因此它的active_mm成员被初始化为前一个运行进程的active_mm值。 |
| brk_randomized | 用来确定对随机堆内存的探测。 |
| rss_stat | 用来记录缓冲信息 |
因此如果当前内核线程被调度之前运行的也是另外一个内核线程时候,那么其mm和avtive_mm都是NULL.
int exit_state;
int exit_code;
int exit_signal;
/* The signal sent when the parent dies: */
int pdeath_signal;
/* JOBCTL_*, siglock protected: */
unsigned long jobctl;
/* Used for emulating ABI behavior of previous Linux versions: */
unsigned int personality;
/* Scheduler bits, serialized by scheduler locks: */
unsigned sched_reset_on_fork:1;
unsigned sched_contributes_to_load:1;
unsigned sched_migrated:1;
/* Force alignment to the next boundary: */
unsigned :0;
/* Bit to tell LSMs we're in execve(): */
unsigned in_execve:1;
unsigned in_iowait:1;| 字段 | 描述 |
|---|---|
| exit_code | 用于设置进程的终止代号,这个值要么是_exit()或exit_group()系统调用参数(正常终止),要么是由内核提供的一个错误代号(异常终止)。 |
| exit_signal | 被置为-1时表示是某个线程组中的一员。只有当线程组的最后一个成员终止时,才会产生一个信号,以通知线程组的领头进程的父进程。 |
| pdeath_signal | 用于判断父进程终止时发送信号。 |
| personality | 用于处理不同的ABI。 |
| in_execve | 用于通知LSM是否被do_execve()函数所调用。 |
| in_iowait | 用于判断是否进行iowait计数。 |
| sched_reset_on_fork | 用于判断是否恢复默认的优先级或调度策略。 |
十一、时间
u64 utime;
u64 stime;
#ifdef CONFIG_ARCH_HAS_SCALED_CPUTIME
u64 utimescaled;
u64 stimescaled;
#endif
u64 gtime;
struct prev_cputime prev_cputime;
#ifdef CONFIG_VIRT_CPU_ACCOUNTING_GEN
struct vtime vtime;
#endif
#ifdef CONFIG_NO_HZ_FULL
atomic_t tick_dep_mask;
#endif
/* Context switch counts: */
unsigned long nvcsw;
unsigned long nivcsw;
/* Monotonic time in nsecs: */
u64 start_time;
/* Boot based time in nsecs: */
u64 start_boottime;
/* MM fault and swap info: this can arguably be seen as either mm-specific or thread-specific: */
unsigned long min_flt;
unsigned long maj_flt;
/* Empty if CONFIG_POSIX_CPUTIMERS=n */
struct posix_cputimers posix_cputimers;
/* Process credentials: */
/* Tracer's credentials at attach: */
const struct cred __rcu *ptracer_cred;
/* Objective and real subjective task credentials (COW): */
const struct cred __rcu *real_cred;
/* Effective (overridable) subjective task credentials (COW): */
const struct cred __rcu *cred;
#ifdef CONFIG_KEYS
/* Cached requested key. */
struct key *cached_requested_key;
#endif
/*
* executable name, excluding path.
*
* - normally initialized setup_new_exec()
* - access it with [gs]et_task_comm()
* - lock it with task_lock()
*/
char comm[TASK_COMM_LEN];
struct nameidata *nameidata;
#ifdef CONFIG_SYSVIPC
struct sysv_sem sysvsem;
struct sysv_shm sysvshm;
#endif
#ifdef CONFIG_DETECT_HUNG_TASK
unsigned long last_switch_count;
unsigned long last_switch_time;
#endif| 字段 | 描述 |
|---|---|
| utime/stime | 用于记录进程在用户态/内核态下所经过的节拍数(定时器) |
| prev_utime/prev_stime | 先前的运行时间。 |
| utimescaled/stimescaled | 用于记录进程在用户态/内核态的运行时间,但它们以处理器的频率为刻度 |
| gtime | 以节拍计数的虚拟机运行时间(guest time) |
| nvcsw/nivcsw | 是自愿(voluntary)/非自愿(involuntary)上下文切换计数 |
| last_switch_count | nvcsw和nivcsw的总和 |
| start_time/real_start_time | 进程创建时间,real_start_time还包含了进程睡眠时间,常用于/proc/pid/stat。 |
| cputime_expires | 用来统计进程或进程组被跟踪的处理器时间,其中的三个成员对应着cpu_timers[3]的三个链表。 |
十二、信号处理
/* Signal handlers: */
struct signal_struct *signal;
struct sighand_struct __rcu *sighand;
sigset_t blocked;
sigset_t real_blocked;
/* Restored if set_restore_sigmask() was used: */
sigset_t saved_sigmask;
struct sigpending pending;
unsigned long sas_ss_sp;
size_t sas_ss_size;
unsigned int sas_ss_flags;| 字段 | 描述 |
|---|---|
| signal | 指向进程的信号描述符 |
| sighand | 指向进程的信号处理程序描述符 |
| blocked | 表示被阻塞信号的掩码,real_blocked表示临时掩码 |
| pending | 存放私有挂起信号的数据结构 |
| sas_ss_sp | 是信号处理程序备用堆栈的地址,sas_ss_size表示堆栈的大小 |
十三、其他
1、保护资源分配或释放自旋锁。
/* Protection against (de-)allocation:
mm, files, fs, tty, keyrings, mems_allowed, mempolicy: */
spinlock_t alloc_lock;2、用于表示获取大内核锁的次数,如果进程未获得过锁,则置为-1。
#ifdef CONFIG_LOCKDEP
# define MAX_LOCK_DEPTH 48UL
u64 curr_chain_key;
int lockdep_depth;
unsigned int lockdep_recursion;
struct held_lock held_locks[MAX_LOCK_DEPTH];
#endif3、在SMP上帮助实现无加锁的进程切换
#ifdef CONFIG_SMP
static inline bool owner_on_cpu(struct task_struct *owner)
{
/*
* As lock holder preemption issue, we both skip spinning if
* task is not on cpu or its cpu is preempted
*/
return READ_ONCE(owner->on_cpu) && !vcpu_is_preempted(task_cpu(owner));
}
/* Returns effective CPU energy utilization, as seen by the scheduler */
unsigned long sched_cpu_util(int cpu);
#endif /* CONFIG_SMP */4、preempt_notifiers结构体链表
#ifdef CONFIG_PREEMPT_NOTIFIERS
/* list of struct preempt_notifier: */
struct hlist_head preempt_notifiers;
#endif 5、blktrace是一个针对Linux内核中块设备I/O层的跟踪工具。
#ifdef CONFIG_BLK_DEV_IO_TRACE
unsigned int btrace_seq;
#endif 6、RCU同步
#ifdef CONFIG_PREEMPT_RCU
int rcu_read_lock_nesting;
union rcu_special rcu_read_unlock_special;
struct list_head rcu_node_entry;
struct rcu_node *rcu_blocked_node;
#endif /* #ifdef CONFIG_PREEMPT_RCU */
#ifdef CONFIG_TASKS_RCU
unsigned long rcu_tasks_nvcsw;
u8 rcu_tasks_holdout;
u8 rcu_tasks_idx;
int rcu_tasks_idle_cpu;
struct list_head rcu_tasks_holdout_list;
#endif /* #ifdef CONFIG_TASKS_RCU */
#ifdef CONFIG_TASKS_TRACE_RCU
int trc_reader_nesting;
int trc_ipi_to_cpu;
union rcu_special trc_reader_special;
struct list_head trc_holdout_list;
struct list_head trc_blkd_node;
int trc_blkd_cpu;
#endif /* #ifdef CONFIG_TASKS_TRACE_RCU */
7、用于调度器统计进程的运行信息
struct sched_info sched_info;8、用于构建进程链表
struct list_head tasks; 9、将尝试次数限制为一次
#ifdef CONFIG_SMP
struct plist_node pushable_tasks;
struct rb_node pushable_dl_tasks;
#endif10、防止内核堆栈溢出
#ifdef CONFIG_CC_STACKPROTECTOR
/* Canary value for the -fstack-protector gcc feature */
unsigned long stack_canary;
#endif 11、PID散列表和链表
/* PID/PID hash table linkage. */
struct pid *thread_pid;
struct hlist_node pid_links[PIDTYPE_MAX];
struct list_head thread_group;
struct list_head thread_node;12、do_fork函数
struct completion *vfork_done;
/* CLONE_CHILD_SETTID: */
int __user *set_child_tid;
/* CLONE_CHILD_CLEARTID: */
int __user *clear_child_tid;在执行do_fork()时,如果给定特别标志,则vfork_done会指向一个特殊地址。如果copy_process函数的clone_flags参数的值被置为CLONE_CHILD_SETTID或CLONE_CHILD_CLEARTID,则会把child_tidptr参数的值分别复制到set_child_tid和clear_child_tid成员。这些标志说明必须改变子进程用户态地址空间的child_tidptr所指向的变量的值。
13、缺页统计
/* MM fault and swap info: this can arguably
be seen as either mm-specific or thread-specific: */
unsigned long min_flt;
unsigned long maj_flt;14、进程权能
/* Tracer's credentials at attach: */
const struct cred __rcu *ptracer_cred;
/* Objective and real subjective task credentials (COW): */
const struct cred __rcu *real_cred;
/* Effective (overridable) subjective task credentials (COW): */
const struct cred __rcu *cred;15、程序名
char comm[TASK_COMM_LEN]; 16、文件
/* Filesystem information: */
struct fs_struct *fs;
/* Open file information: */
struct files_struct *files;17、进程通信
#ifdef CONFIG_SYSVIPC
struct sysv_sem sysvsem;
struct sysv_shm sysvshm;
#endif18、处理器数据
/* CPU-specific state of this task */
struct thread_struct thread; 19、命名空间
/* namespaces */
struct nsproxy *nsproxy; 20、进程审计
#ifdef CONFIG_AUDIT
#ifdef CONFIG_AUDITSYSCALL
struct audit_context *audit_context;
#endif
kuid_t loginuid;
unsigned int sessionid;
#endif21、用于copy_process函数使用CLONE_PARENT 标记时
/* Thread group tracking: */
u64 parent_exec_id;
u64 self_exec_id;22、中断
#ifdef CONFIG_TRACE_IRQFLAGS
struct irqtrace_events irqtrace;
unsigned int hardirq_threaded;
u64 hardirq_chain_key;
int softirqs_enabled;
int softirq_context;
int irq_config;
#endif
23、 task_rq_lock函数所使用的锁
/* Protection of the PI data structures: */
raw_spinlock_t pi_lock; 24、 基于PI协议的等待互斥锁,其中PI指的是priority inheritance(优先级继承)
#ifdef CONFIG_RT_MUTEXES
/* PI waiters blocked on a rt_mutex held by this task: */
struct rb_root_cached pi_waiters;
/* Updated under owner's pi_lock and rq lock */
struct task_struct *pi_top_task;
/* Deadlock detection and priority inheritance handling: */
struct rt_mutex_waiter *pi_blocked_on;
#endif25、死锁检测
#ifdef CONFIG_DEBUG_MUTEXES
/* Mutex deadlock detection: */
struct mutex_waiter *blocked_on;
#endif26、 lockdep
#ifdef CONFIG_LOCKDEP
# define MAX_LOCK_DEPTH 48UL
u64 curr_chain_key;
int lockdep_depth;
unsigned int lockdep_recursion;
struct held_lock held_locks[MAX_LOCK_DEPTH];
#endif27、JFS文件系统
/* journalling filesystem info */
void *journal_info; 28、块设备链表
/* stacked block device info */
struct bio_list *bio_list; 29、内存回收
struct reclaim_state *reclaim_state; 30、I/O调度器所使用的信息
struct io_context *io_context; 31、记录进程的I/O计数
struct task_io_accounting ioac;
#ifdef CONFIG_PSI
/* Pressure stall state */
unsigned int psi_flags;
#endif
#ifdef CONFIG_TASK_XACCT
/* Accumulated RSS usage: */
u64 acct_rss_mem1;
/* Accumulated virtual memory usage: */
u64 acct_vm_mem1;
/* stime + utime since last update: */
u64 acct_timexpd;
#endif在linux6.1内核的系统上执行cat获得进程1的I/O计数如下:
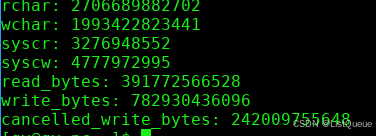
输出的数据项刚好是task_io_accounting结构体的所有成员。
32、CPUSET功能
#ifdef CONFIG_CPUSETS
/* Protected by ->alloc_lock: */
nodemask_t mems_allowed;
/* Sequence number to catch updates: */
seqcount_spinlock_t mems_allowed_seq;
int cpuset_mem_spread_rotor;
int cpuset_slab_spread_rotor;
#endif33、futex同步机制
#ifdef CONFIG_FUTEX
struct robust_list_head __user *robust_list;
#ifdef CONFIG_COMPAT
struct compat_robust_list_head __user *compat_robust_list;
#endif
struct list_head pi_state_list;
struct futex_pi_state *pi_state_cache;
struct mutex futex_exit_mutex;
unsigned int futex_state;
#endif34、 非一致内存访问(NUMA Non-Uniform Memory Access)
#ifdef CONFIG_NUMA
/* Protected by alloc_lock: */
struct mempolicy *mempolicy;
short il_prev;
short pref_node_fork;
#endif35、RCU链表
struct rcu_head rcu;
refcount_t rcu_users;
int pagefault_disabled;36、管道
/* Cache last used pipe for splice(): */
struct pipe_inode_info *splice_pipe;37、延迟计数
#ifdef CONFIG_TASK_DELAY_ACCT
struct task_delay_info *delays;
#endif
38、Infrastructure for displayinglatency
#ifdef CONFIG_LATENCYTOP
int latency_record_count;
struct latency_record latency_record[LT_SAVECOUNT];
#endif
39、time slack values,常用于poll和select函数
/*
* Time slack values; these are used to round up poll() and
* select() etc timeout values. These are in nanoseconds.
*/
u64 timer_slack_ns;
u64 default_timer_slack_ns;
40、 ftrace跟踪器
#ifdef CONFIG_FUNCTION_GRAPH_TRACER
/* Index of current stored address in ret_stack: */
int curr_ret_stack;
int curr_ret_depth;
/* Stack of return addresses for return function tracing: */
struct ftrace_ret_stack *ret_stack;
/* Timestamp for last schedule: */
unsigned long long ftrace_timestamp;
/*
* Number of functions that haven't been traced
* because of depth overrun:
*/
atomic_t trace_overrun;
/* Pause tracing: */
atomic_t tracing_graph_pause;
#endif
#ifdef CONFIG_TRACING
/* Bitmask and counter of trace recursion: */
unsigned long trace_recursion;
#endif /* CONFIG_TRACING */
















 1629
1629

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









