




数据集主页:Go
背景
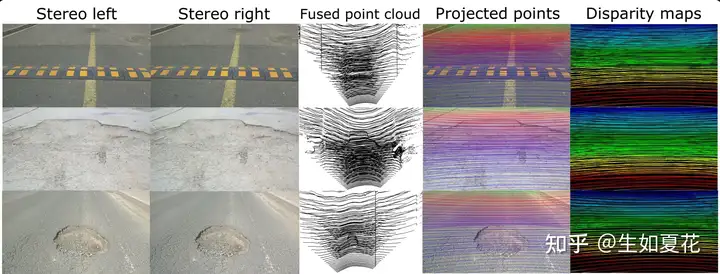
近年来,智能和自动驾驶车辆的快速发展对驾乘舒适性也提出了更高的要求。路面作为车辆与物理世界有接触的唯一媒介,对车辆行驶性能有决定性影响。提前感知路面状态,尤其是重建路面几何轮廓信息,能为后续决策规划和动力学控制系统提供关键参考信息。基于此实际背景,我们构建并发布了该路面重建数据集(Road Surface Reconstruction Dataset, RSRD)。这是首个专门面向自动驾驶路面感知的高精度、多模态和大规模数据集,可作为诸多计算机视觉和自动驾驶应用的测试基准。
此外,我们于2022年发布了首个大规模路面分类数据集RSCD,含有100万张精确标注的路面图像。此数据集与之结合, 能够提供更加准确、全面的路面状态信息,赋能高阶自动驾驶。
数据采集
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









