






1.寄存器轮询_收发字符串
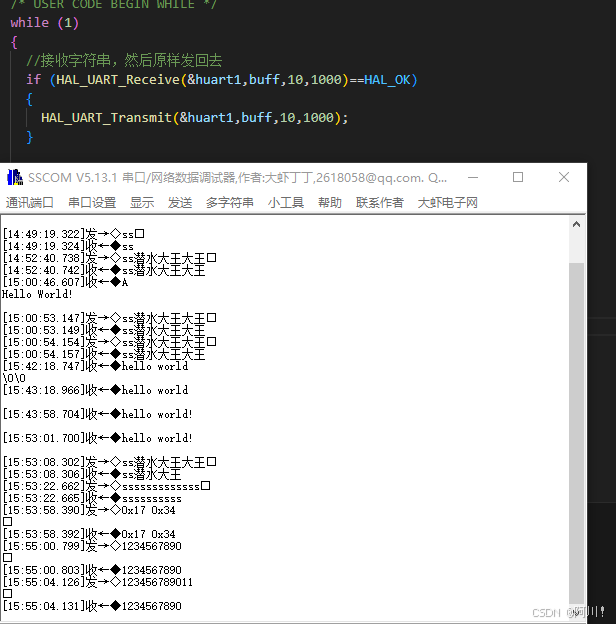
通过寄存器轮询方式实现了收发单个字节之后,我们趁热打铁,争上游,进阶到字符串。字符串就是多个字符。很明显可以循环收发单个字节实现。
然后就是接收字符串。如果接受单个字符的函数放在while里,它也可以实现一个一个的接收字符串,在一定时间戳下,效果等同。
然后我们要想想如何整合,写成一个函数。
2.问题解答,状态位清零
我们的编程方式,一个是寄存器写法,一个是hal库写法。还有的就是实现思路。
//发送一个字符
void USART_SendChar(uint8_t ch)
{
//判断TDR是否为空,必须等待TDR为空才能写入数据,也就是继续发送
while((USART1->SR & USART_SR_TXE)==0)
{
}
//将要发送的数据写入TDR
USART1->DR = ch;
}初始的时候,TDR的存储寄存器肯定为空
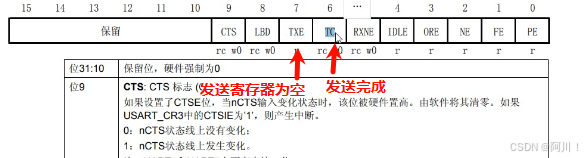
关于状态位清零,TXE和RXNE都可以自动清零。

只要发数据,就自动清零。
RXNE也是一样,只要读RDR,就会清零。

3.串口通讯 寄存器中断方式
复制上一个工程文件,把改删除的删掉。
主要配置中断管理NVIC
中断服务函数
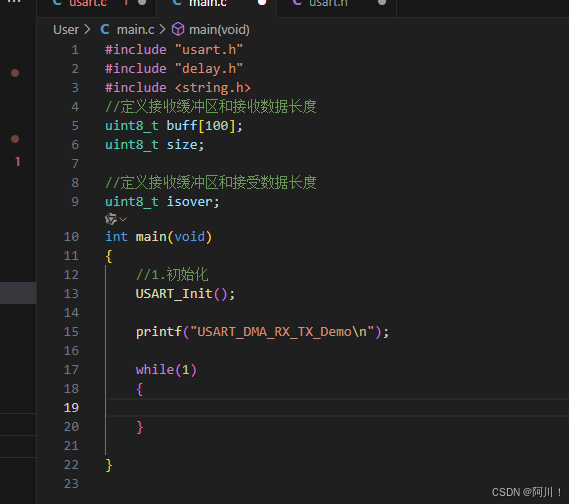
main.c
#include "usart.h"
#include "delay.h"
#include <string.h>
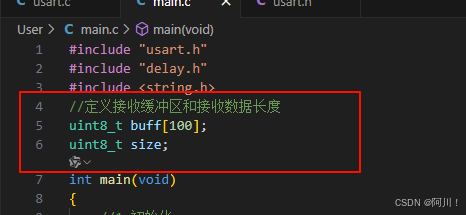
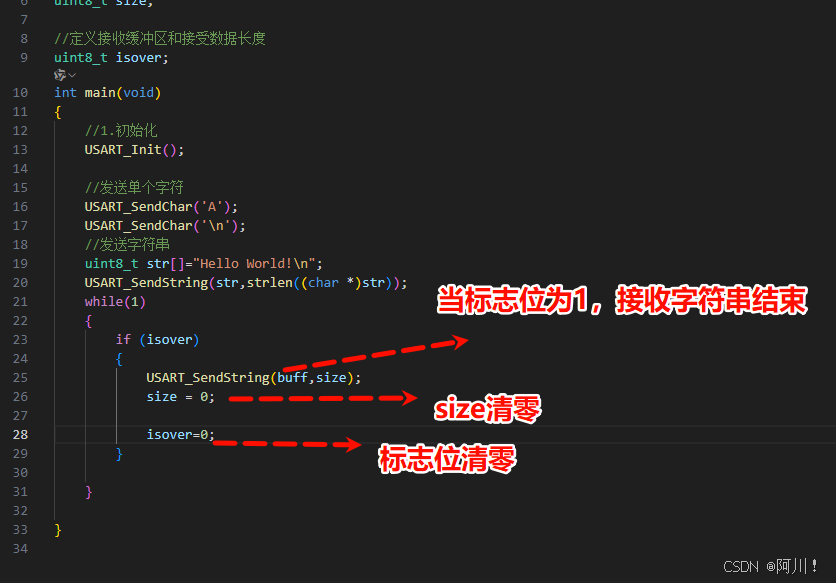
//定义接收缓冲区和接收数据长度
uint8_t buff[100];
uint8_t size;
int main(void)
{
//1.初始化
USART_Init();
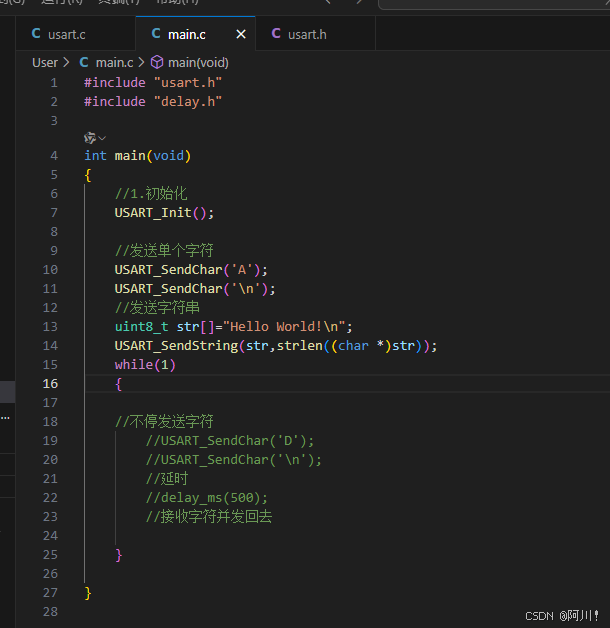
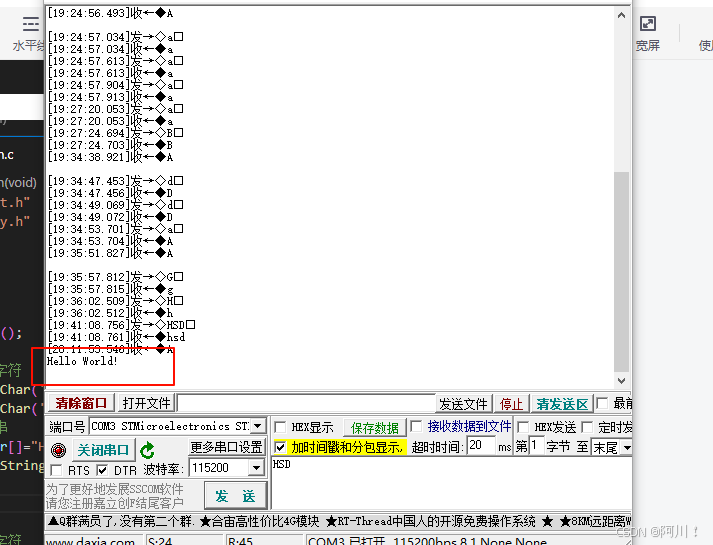
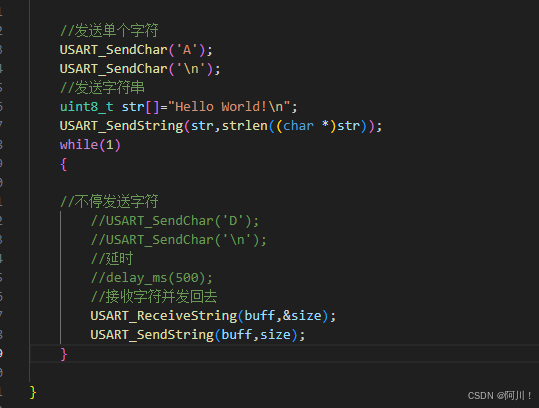
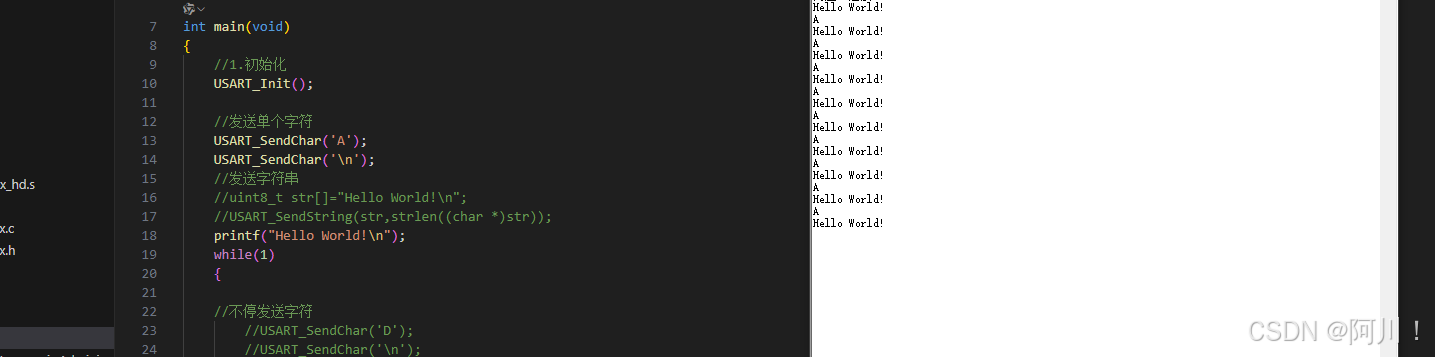
//发送单个字符
USART_SendChar('A');
USART_SendChar('\n');
//发送字符串
uint8_t str[]="Hello World!\n";
USART_SendString(str,strlen((char *)str));
while(1)
{
}
}
usart.c
#include "usart.h"
//初始化
void USART_Init(void)
{
//开启时钟
RCC->APB2ENR |= RCC_APB2ENR_USART1EN;
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN;
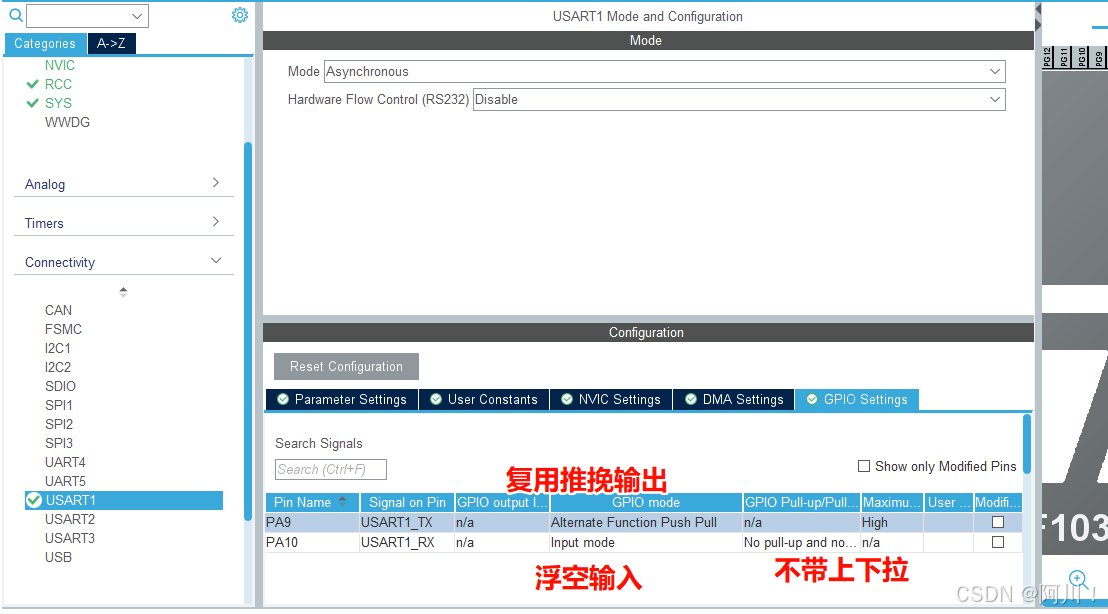
//GPIO工作模式
// PA9:TX 复用推挽输出,CNF=10,MODE=11
GPIOA->CRH |= GPIO_CRH_MODE9;
GPIOA->CRH |= GPIO_CRH_CNF9_1;
GPIOA->CRH &= ~GPIO_CRH_CNF9_0;
// PA10:RX 浮空输入,CNF=01,MODE=00
GPIOA->CRH &= ~GPIO_CRH_MODE10;
GPIOA->CRH &= ~GPIO_CRH_CNF10_1;
GPIOA->CRH |= GPIO_CRH_CNF10_0;
//串口模块设置
//设置波特率 115200
USART1->BRR = 0x271;
//使能串口和收发模块
USART1->CR1 |= USART_CR1_UE;
USART1->CR1 |= (USART_CR1_TE|USART_CR1_RE);
//配置数据帧格式
USART1->CR1 &=~ USART_CR1_M; //长度为8位的数据,没有校验位
USART1->CR1 &=~ USART_CR1_PCE; //无校验,不使用校验位
USART1->CR2 &=~ USART_CR2_STOP; //1位停止位
//使能串口接收中断
USART1->CR1 |= USART_CR1_RXNEIE;
USART1->CR1 |= USART_CR1_IDLEIE;
//配置NVIC
NVIC_SetPriorityGrouping(3);
NVIC_SetPriority (USART1_IRQn,2);
NVIC_EnableIRQ(USART1_IRQn);
}
//发送一个字符
void USART_SendChar(uint8_t ch)
{
//判断TDR是否为空,必须等待TDR为空才能写入数据,也就是继续发送
while((USART1->SR & USART_SR_TXE)==0)
{
}
//将要发送的数据写入TDR
USART1->DR = ch;
}
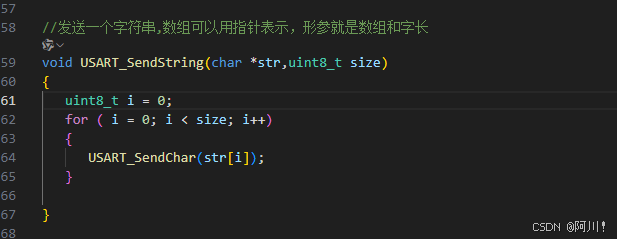
//发送字符串,数组可以用指针表示,形参就是数组和字长
void USART_SendString(char *str,uint8_t size)
{
uint8_t i = 0;
for ( i = 0; i < size; i++)
{
USART_SendChar(str[i]);
}
}
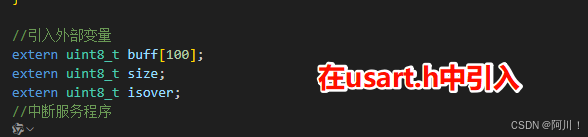
//引入外部变量
extern uint8_t buff[100];
extern uint8_t size;
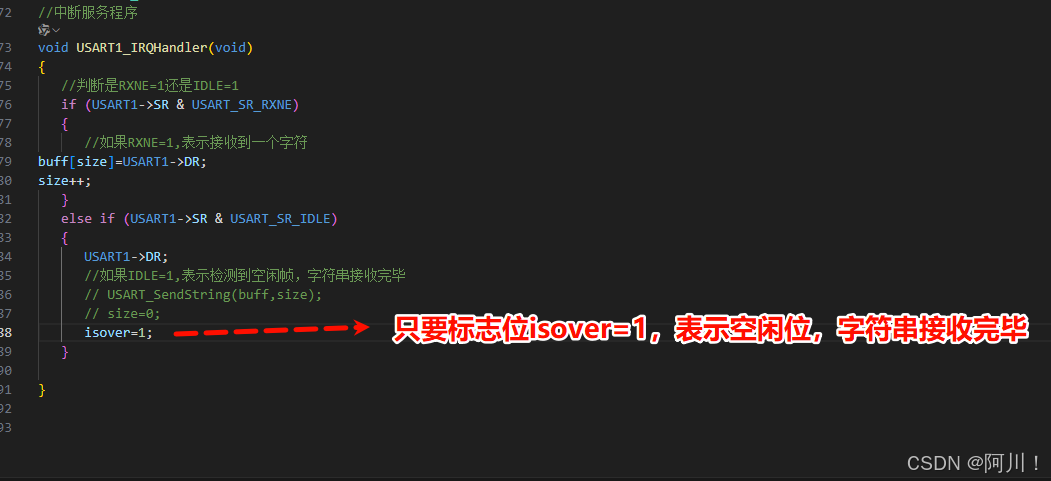
//中断服务程序
void USART1_IRQHandler(void)
{
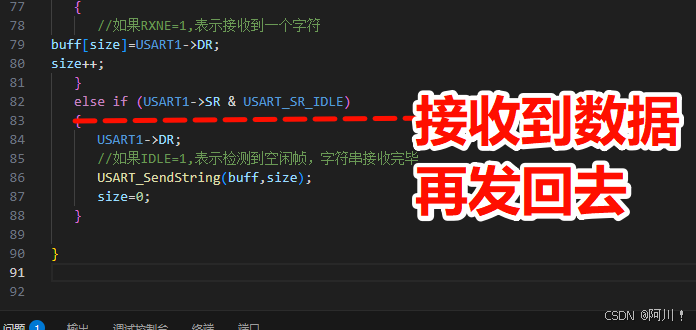
//判断是RXNE=1还是IDLE=1
if (USART1->SR & USART_SR_RXNE)
{
//如果RXNE=1,表示接收到一个字符
buff[size]=USART1->DR;
size++;
}
else if (USART1->SR & USART_SR_IDLE)
{
USART1->DR;
//如果IDLE=1,表示检测到空闲帧,字符串接收完毕
USART_SendString(buff,size);
size=0;
}
}
usart.h
#ifndef __USART_H
#define __USART_H
#include "string.h"
#include "stm32f10x.h"
//初始化
void USART_Init(void);
//发送一个字符
void USART_SendChar(uint8_t ch);
//发送一个字符串,数组可以用指针表示,形参就是数组和字长
void USART_SendString(char *str,uint8_t size);
#endif
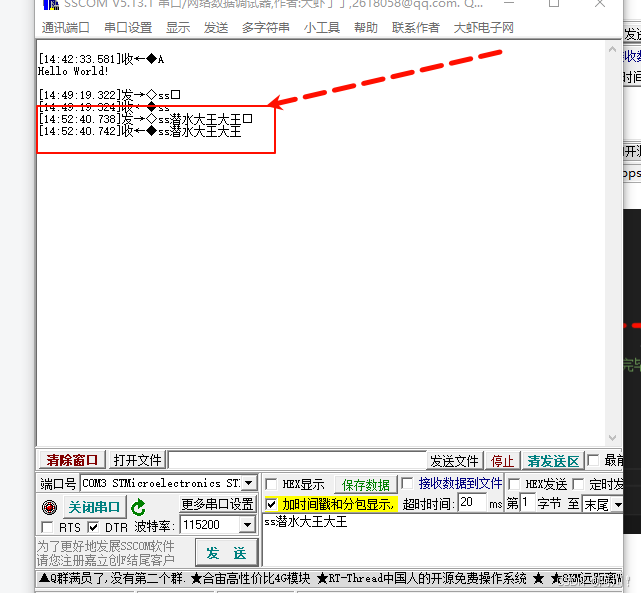
我们可以将接收字符串的标志位在外面定义出来。
![]()
4.串口案例一串口通讯_hal库轮询方式
我们有usart1配置。

我们反正还得需要配,这个时候我们可以不管他,直接去左边框栏中点点点。图形化配置的精髓就是方便。
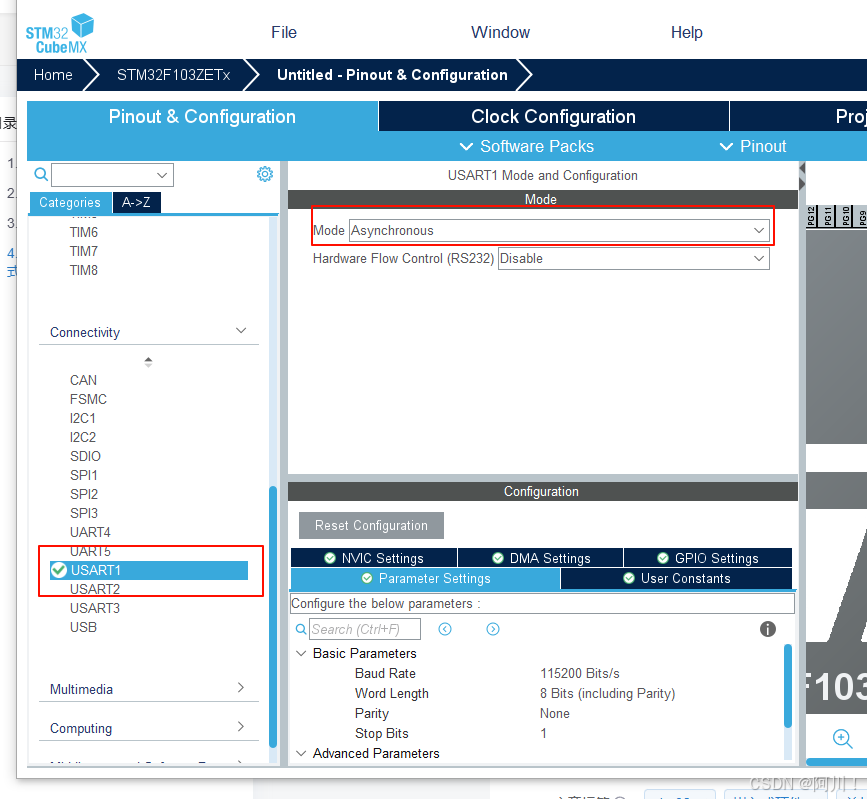
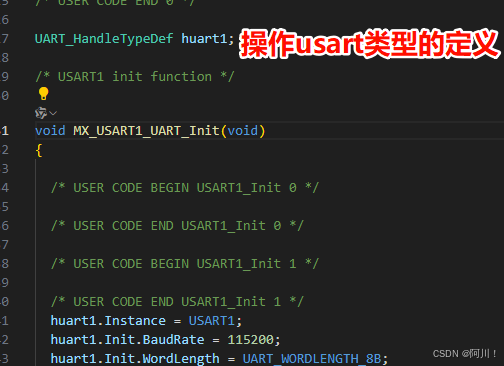
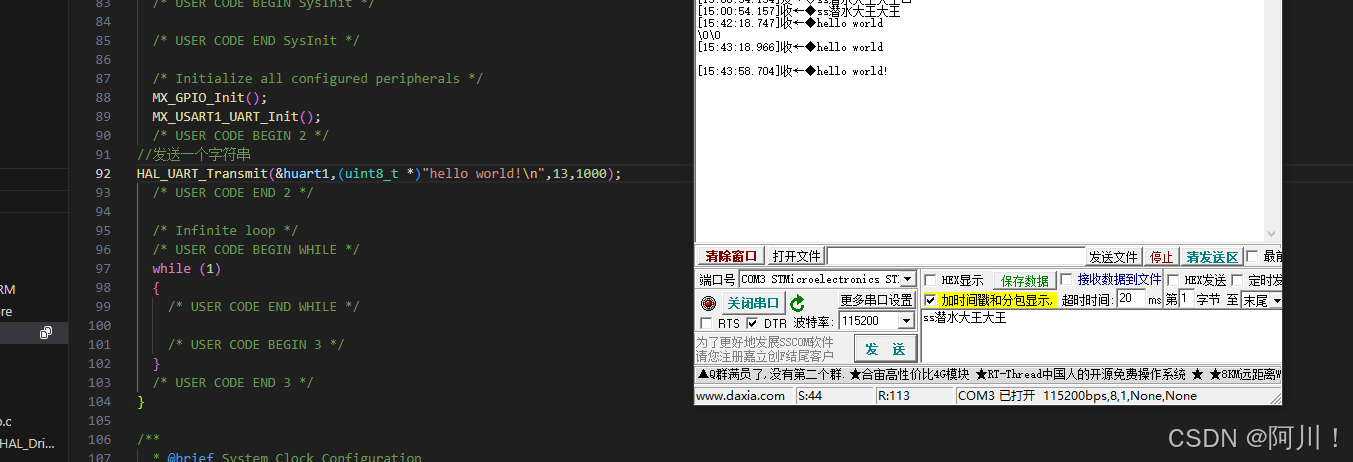
还是调用hal库简单。
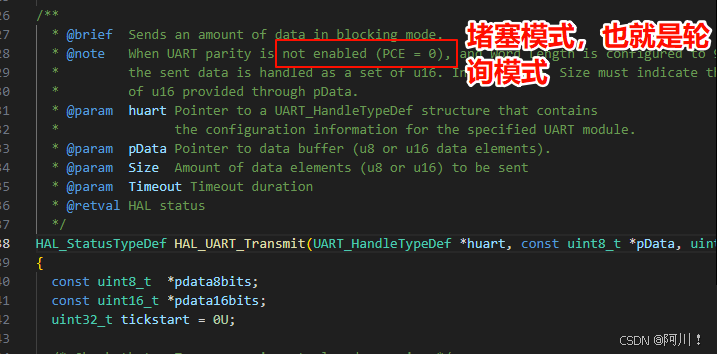
轮询方式使用效率不是很高,中断方式才高。
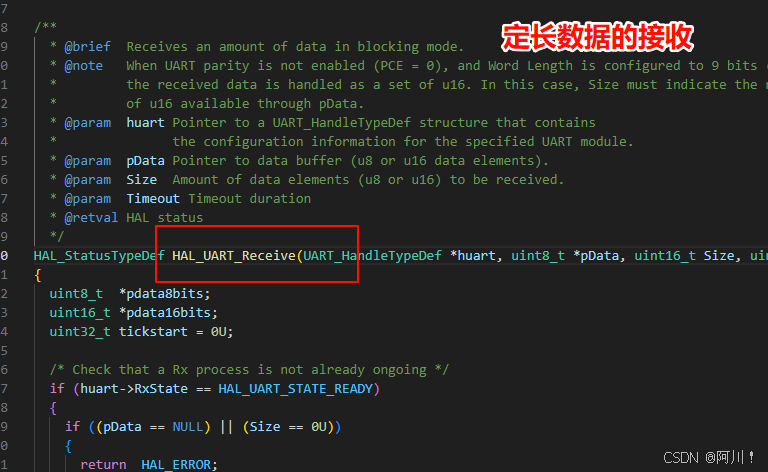
5.HAL库中断方式—定长数据接收
记住USART1用异步模式,要打开中断实现
中断方式要和回调函数结合。
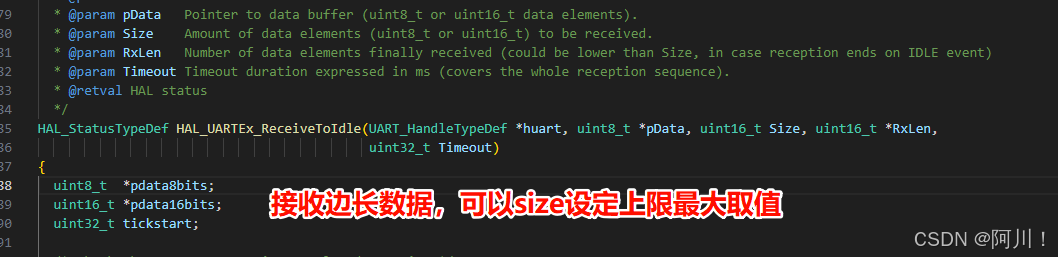
接收定长数据,会和之前接收的数据结合分析
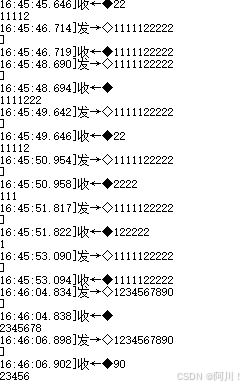
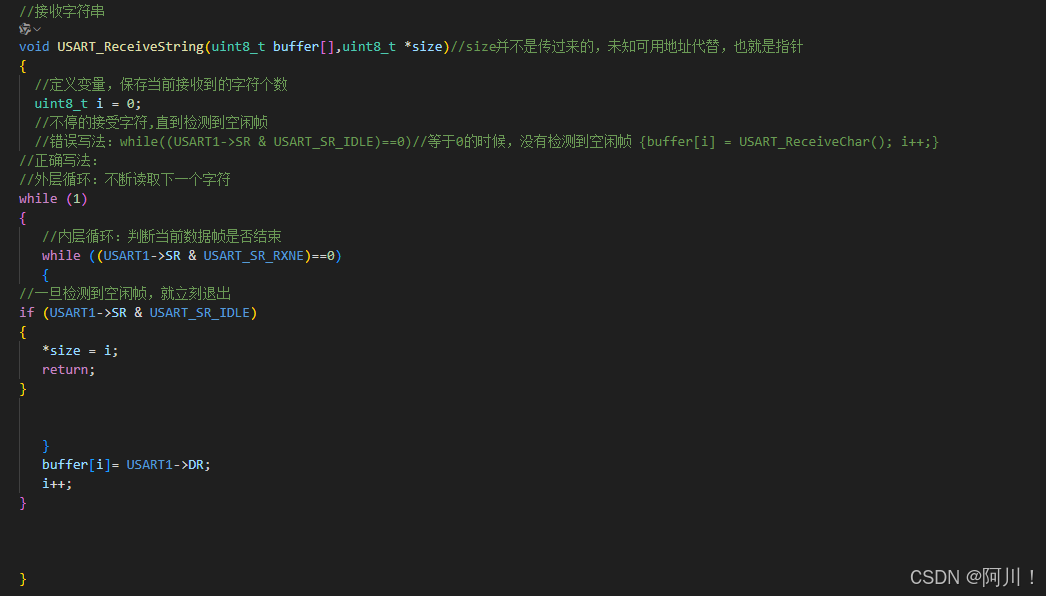
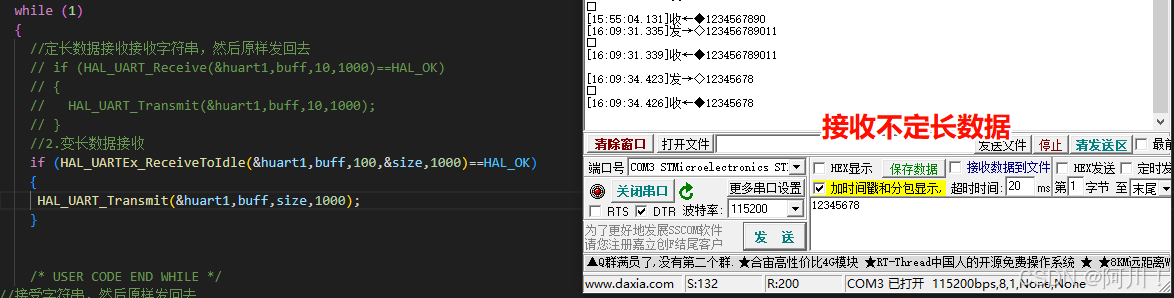
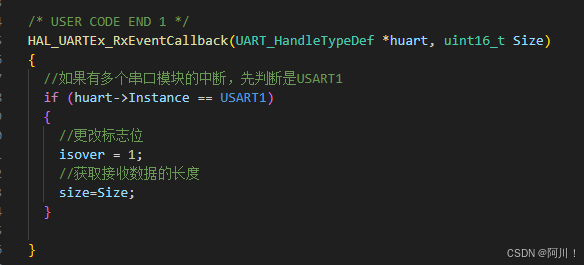
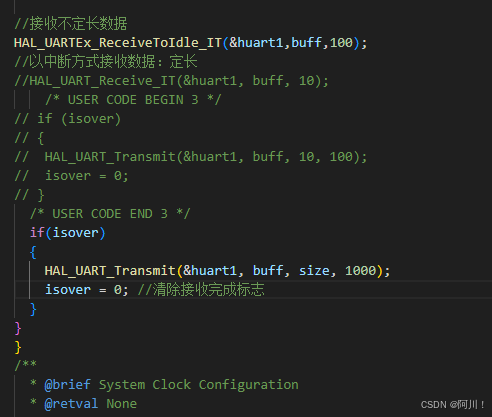
6.HAL库中断方式--变长数据接收
![]()
接收变长数据,size是可接收的字长上限。
她的回调不一样,是下面这个。在函数面前加void,我忘了加,编译出错。

先检查是什么模块
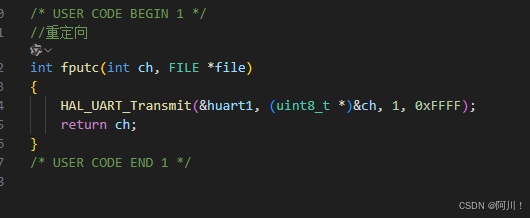
7.重定向printf—寄存器方式
用printf输出调试信息,打印到屏幕,没有屏幕也可重定向printf,把数据打印到串口,从而在电脑端接收调试信息,这是一种有效调试手段。
printf大法对任何语言都是有用的。
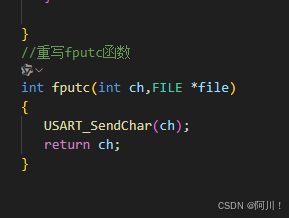
printf的底层函数:fputc
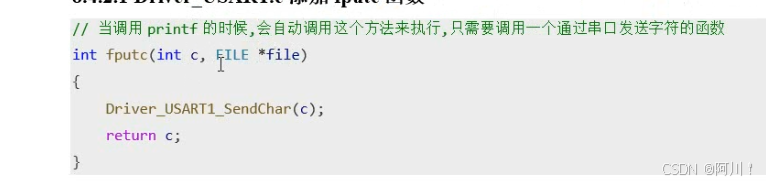
把字符一个个发到控制台文件里。
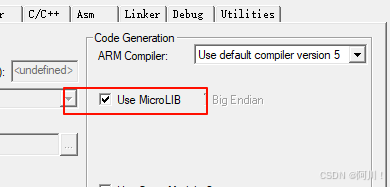
重写也在usart.c里,记得引入<stdio.h>
8.重定向——hal
usart.c里
在main函数来随便打印。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









