







现在的智能机器人可以通过视觉和触觉准确识别许多物体。这些机器人通过传感器获得的触觉信息后,利用机器学习算法对这些触觉信息进行处理,以此机器人能够识别以前处理过的物体。
然而,物体的尺寸和形状相似时,或者机器人没有见过某类物体时,感知往往会出现混乱。除此之外,限制机器人感知的其他因素还包括背景噪声和形状大小不同的同一类型物体。

在清华大学最近发表的一项研究中,研究人员致力于突破机器人识别各种常见但复杂物品的难题,该项研究成果发表于《Applied Physics Reviews》。
人类拥有多种不同类型的触觉,其中之一就是热感觉。因为有热感觉这种触觉,我们能够感知到风的吹拂,感知到冷与热。除此之外,我们还能根据不同材质能够产生的不同冷却感来区分不同的物质类型,如木材和金属。
研究人员在该项研究中,设计一种包含热感的机器人触觉传感方法,以便更稳健、更准确地探测物体。
研究人员表示:“我们建议在手抓握过程中利用时空触觉感应来扩展机器人的功能以及同时感知所抓物体的多种属性的能力,包括热导率、热扩散率、表面粗糙度、接触压力和温度。”

触觉传感器的原理图和恒温差分电路
研究小组创建了一种分层传感器,表面是材料检测层,底部是压力敏感层,中间的多孔层对热变化敏感。他们将这种传感器与一种高效的级联分类算法搭配使用,该算法按照从易到难的顺序排除物体类型,从空纸盒等简单类别开始,然后再到橘子皮或布屑。
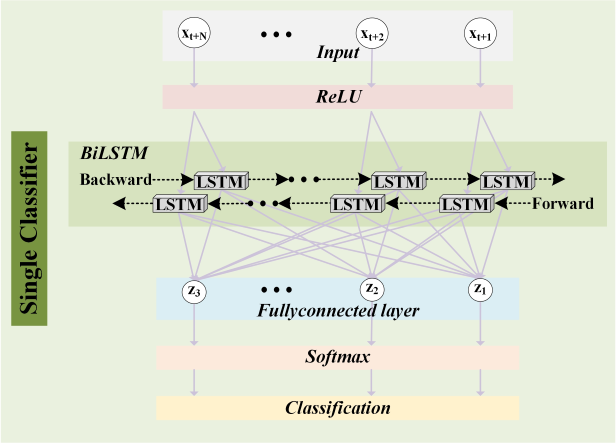
基于长短期记忆网络(LSTM)的单分类器结构
为了测试他们方法的能力,研究小组创建了一个智能机器人触觉系统来进行垃圾分类。这个机器人能够捡起一系列常见的垃圾,包括空纸盒、面包屑、塑料袋、塑料瓶、餐巾纸、海绵、橘子皮和过期药品。并能实现垃圾分类,分别装入可回收垃圾、食物残渣、有害垃圾和其他垃圾的容器中。
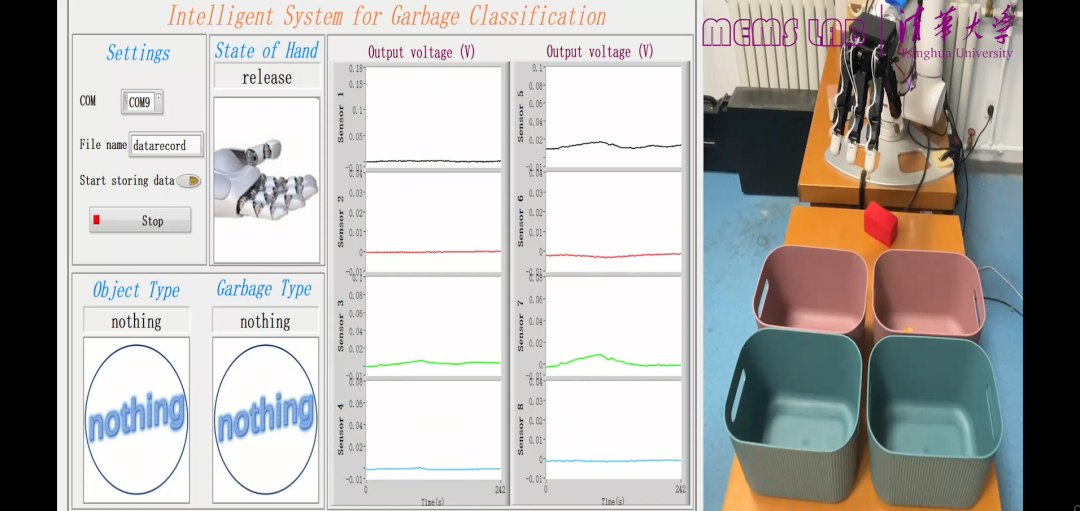
在识别未见过的物体方面,该智能机器人的分类准确率也能达到98.85。这种成功的垃圾分类行为可以大大减少现实生活中的人力劳动,并为智能生活技术提供了广泛的适用性。
该领域未来的研究重点将放在提高机器人的体现智能和自主执行能力上。
研究人员表示:“此外,通过将这种传感器与脑机接口技术结合,传感器收集到的触觉信息可以转化为人脑可接受的神经信号,重新增强手部残疾人士的触觉感知能力。”
参考文献:
https://pubs.aip.org/aip/apr/article-abstract/11/2/021424/3297422/Enhanced-robotic-tactile-perception-with?redirectedFrom=fulltext
—— End ——
仅用于学术分享,若侵权请留言,即时删侵!
点击投稿:脑机接口社区学术新闻投稿指南
加入社群
欢迎加入脑机接口社区交流群,
探讨脑机接口领域话题,实时跟踪脑机接口前沿。
加微信群:
添加微信:RoseBCI【备注:姓名+行业/专业】。
加QQ群:913607986
欢迎来稿
1.欢迎来稿。投稿咨询,请联系微信:RoseBCI
点击投稿:脑机接口社区学术新闻投稿指南
2.加入社区成为兼职创作者,请联系微信:RoseBCI


一键三连「分享」、「点赞」和「在看」
不错每一条脑机前沿进展 ~



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











