







近日,北京理工大学机械与车辆学院毕路拯教授团队以“Robust Decoding of Upper-limb Movement Direction under Cognitive Distraction with Invariant Patterns in Embedding Manifold”为题提出了一种认知分心下的上肢运动方向鲁棒解码方法,该论文被《IEEE Transactions on Neural Systems and Rehabilitation Engineering》录取。论文第一作者为其团队硕士研究生彭博林。
DOI: 10.1109/TNSRE.2024.3379451
论文摘要
运动脑机接口在运动康复和假肢控制方面引发了越来越多的研究兴趣。使用非侵入式脑机接口解码上肢运动方向已经得到广泛研究。然而,只有极少数研究考虑了认知分心的干预,其在实际应用中会损害解码性能。我们提出了一种新颖的解码模型,在由不同注意力状态下的脑电信号构成的混合数据集上,使用嵌入流形内的不变模式进行解码。我们重构了一种从本质上描述上肢运动的嵌入低维流形,并将从大脑功能连通性中分解出的神经活动模式转移到流行空间中,以进一步保留运动相关信息。实验结果表明,提出的解码模型相比于基线方法,在专注和分心状态混合的数据集上具有更高的鲁棒性。我们的研究为建模与运动相关脑电信号的统一基础机制提供了见解,并能帮助增强脑机接口系统在现实世界环境下的实用性。
研究背景及主要内容
脑机接口在运动功能的辅助和康复上具有广泛的应用前景。运动执行(ME)是一种更直观和自然的范式,其能够激发编码了更多信息的运动相关皮层电位(MRCP),能够对上肢运动方向进行解码。现有研究已经在理想条件下对上肢运动解码进行了广泛研究。然而在应用中,认知分心会由于真实世界的复杂性和不可预测性产生,从而损害系统的解码性能。极少数研究考虑了认知分心的影响,并采用了分层解码模型,其首先估计用户的认知状态,再调用对应状态的解码模型。然而,用户的认知状态不断变化,极大的不确定性使其很难准确地估计。
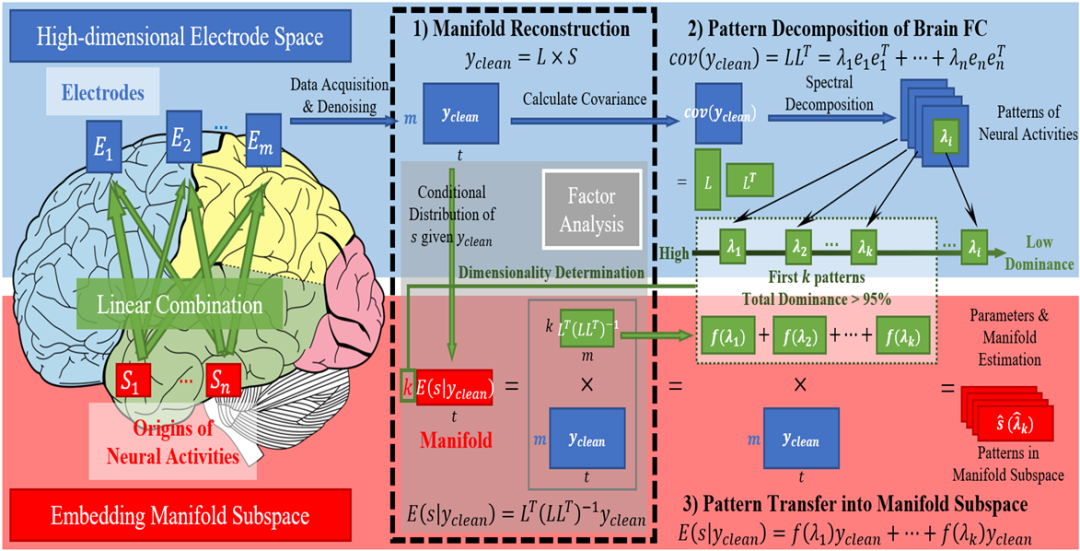
为此,我们的目标是寻找一种上肢运动方向的神经表征,其在不同的认知状态之间保持不变,从而避免在使用中对用户的认知状态进行估计。我们设计了一种神经表征,其建模了一种不同认知状态脑电信号中隐含的统一运动机制。基于此表征,本研究首次在混合认知状态数据集上建立了认知分心鲁棒的上肢运动方向直接解码模型。
研究结果
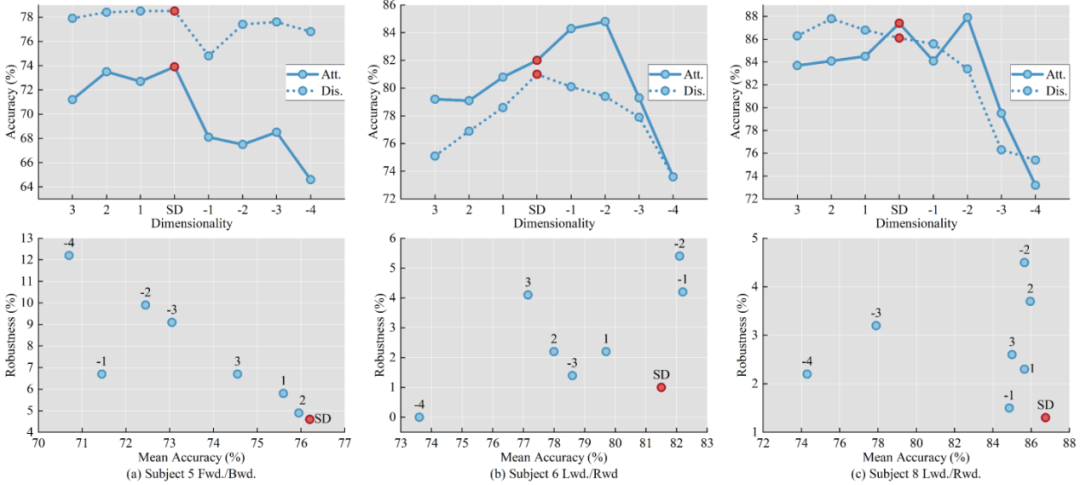
共8名被试参与了本实验。本研究提出的解码模型在前-后方向对上的分类准确率分别达到73.8%和74.6%,鲁棒性为3.73±1.82%;在左-右方向对上的分类准确率分别达到79.9%和78.0%,鲁棒性为1.99±2.15%。结果表明,模型的解码准确率和鲁棒性均优于基线算法。
研究贡献及前景
本研究基于流形的特征表征了上肢运动神经活动的隐含固有模式,能够打破估计变化的认知状态对解码性能的限制,因此能增强脑机接口系统在真实世界中的实用性。
更多研究成果
为了推进脑机接口和脑控机器迈向真实的应用场景,北京理工大学毕路拯教授团队一直致力于自然场景下的脑机接口、脑机混合智能和脑机协同控制的理论、方法和应用研究。在脑机接口方面,该团队关于考虑注意状态的运动意图分层解码模型曾发表于国际顶级期刊《IEEE Transactions on Neural Systems and Rehabilitation Engineering》,参考《北理工团队在推动运动意图神经解码走向真实应用场景方面取得研究进展》,关于单手和双手协同运动的神经解码成果曾发表于生物医学工程领域旗舰期刊《IEEE Transactions on Biomedical Engineering》,参考《如何对单手和双手协同运动方向进行神经表征和解码?北理工研究团队给出了相关方案》,所提出的神经活动驱动的深度学习解码模型曾发表发表于国际期刊《IEEE Transactions on Neural Systems and Rehabilitation Engineering》,参考《北理工团队提出一种神经表征驱动的手部运动解码深度学习模型》。关于不同注意力状态下运动意图的鲁棒神经解码研究曾发表于生物医学工程领域旗舰期刊《IEEE Transactions on Biomedical Engineering》,参考《北理工团队在不同注意力状态下肢体运动意图的鲁棒神经解码方面取得重要研究进展》,该论文也获得2022世界机器人大赛-BCI脑控机器人大赛一青年论文比赛一等奖(唯一),关于非侵入式神经信号的连续运动解码曾发表于国际顶级期刊《IEEE Transactions on Neural Systems and Rehabilitation Engineering》,参考《北理工团队在基于非侵入式神经信号的连续运动解码方面取得新进展》,所创建的自然场景下声音目标探测的听觉脑机接口曾发表发表于国际顶级期刊《IEEE Transactions on Neural Systems and Rehabilitation Engineering》,参考《北理工团队创建自然场景下声音目标探测的听觉脑机接口》。在脑机协同控制方面,该团队所创建的多任务操控的脑机协同控制方法并应用于智能车辆的研究曾发表在被国际顶级期刊《IEEE Transactions on Systems, Man, and Cybernetics: Systems》,参考《北理工团队创建面向多任务操控的脑机协同控制方法并应用于智能车辆》,创建的脑机协同控制框架以及在脑空智能车辆上的应用研究曾发表于国际顶级期刊《IEEE Transactions on Intelligent Transportation Systems》,参考《北理工研究团队在脑机协同控制技术与脑控智能车辆方面取得重要进展》,所提出的基于鲁棒非线性模型预测的脑机协同控制方法以及在脑空移动机器人上的应用研究曾发表于国际顶级期刊《IEEE Transactions on Cybernetics》,参考《北理工研究团队在脑-控移动机器人上取得重要进展》。此外,该团队首创的脑控多域多任务机器人系统还曾作为脑机接口领域创新成果在2022年世界机器人大赛现场进行展示,参考《北理工智能人机系统团队研发“脑控”机器人 应用于城市反恐防暴--2022世界机器人大赛》。
团队与作者简介
北京理工大学智能人机系统团队隶属于北京理工大学机械与车辆学院机电系统与装备研究所。团队由5名教师和30余名博士后、博士和硕士研究生组成,负责人为毕路拯教授。团队主要研究方向包括脑机接口与脑控智能机器、多机器人协同与多模态智能感知、以及人机智能交互与智能辅助驾驶。团队在国际权威期刊IEEE TCYB, TBME, TITS, TSMCS, TNSRE和THMS等发表论文100余篇(含IEEE Trans 30多篇)。获授权国家发明专利30多项。获教育部自然科学奖二等奖1项,中国电子学会科技进步二等奖1项。获得2022年世界机器人大会-BCI脑控机器人大赛-青年论文比赛一等奖(唯一)。获第九届中国国际“互联网+”大学生创新创业大赛金奖;首届“京彩大创”北京大学生创新创业总决赛季军和第八届中国国际“互联网+”大学生创新创业大赛全国铜奖;2023年挑战杯全国二等奖。
毕路拯教授简介
毕路拯现为北京理工大学机械与车辆学院教授、博士生导师、机电系统与装备研究所所长。担任中国脑机接口产业联盟数据与基础软件工作组副主席、中国计算机学会智能汽车分会专委会常委委员、中国人工智能学会脑机融合与生物机器智能专委会委员、中国仿真学会交通建模与仿真专业委员会委员、中国仿真学会智能优化与调度专业委员会委员、世界机器人大赛-BCI脑控机器人专家组成员。
仅用于学术分享,若侵权请留言,即时删侵!
—— End ——
仅用于学术分享,若侵权请留言,即时删侵!
点击投稿:脑机接口社区学术新闻投稿指南
加入社群
欢迎加入脑机接口社区交流群,
探讨脑机接口领域话题,实时跟踪脑机接口前沿。
加微信群:
添加微信:RoseBCI【备注:姓名+行业/专业】。
加QQ群:913607986
欢迎来稿
1.欢迎来稿。投稿咨询,请联系微信:RoseBCI
点击投稿:脑机接口社区学术新闻投稿指南
2.加入社区成为兼职创作者,请联系微信:RoseBCI


一键三连「分享」、「点赞」和「在看」
不错每一条脑机前沿进展 ~



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











