







栏目介绍: “论文快讯”栏目旨在精简地分享一周内发表在高水平期刊上的Metasurface领域研究成果,帮助读者及时了解领域前沿动态,如果对专栏的写法或内容有什么建议欢迎留言,后续会陆续开启其他专栏,敬请期待。
论文基本信息
-
标题: Baseline-free structured light 3D imaging using a metasurface double-helix dot projector
作者:
Zicheng Shen(清华大学精密仪器系)
Yibo Ni(清华大学精密仪器系)
通讯作者:Yuanmu Yang(清华大学精密仪器系)发表时间: 2025年2月7日(其中2024年11月22日投稿,2025年1月11日接收)
发表期刊: Nanophotonics(JCR-Q1,IF=6.5)
论文快览:
解决的问题:
结构光 3D 成像依赖投影器与相机之间的基线长度进行三角测量,但这一要求限制了系统的小型化,尤其是在智能手机等紧凑设备中。同时,深度依赖点扩散函数(PSF)的被动 3D 成像方法虽然可消除基线限制,但难以在无纹理场景中有效工作。因此,迫切需要一种兼具结构光的高可靠性与被动深度测量的紧凑性,并能在复杂场景下精确工作的 3D 成像方案。
提出的方法:
本文提出了一种基于超表面双螺旋点投影的无基线结构光 3D 成像系统。该方法利用超表面对光场的亚波长精确调控能力,设计并优化了一种双螺旋点阵投影器,在 60° 视场内投影 64 × 64 结构光点阵,并在每个点上编码双螺旋模式。该模式的旋转角度与目标深度形成单调一一对应关系,从而实现高精度深度感知。系统采用分束器将投影路径与接收路径折叠,实现单开口配置,并通过快速算法从图像中提取双螺旋旋转角度以计算深度信息,减少计算复杂度。
实现的效果:
实验表明,该系统可在500 mm 深度范围内实现 3D 成像,深度误差低于 1 cm,相对误差约 2.4%,与 Intel® RealSense™ D435 等商用结构光设备相当。测试场景包括多个纸箱和真人面部,均成功生成高精度 3D 点云,且计算时间仅需 0.4 s,适用于实时应用。此外,该系统可通过增加超表面投影器直径来提升深度测量精度和范围,并具备智能手机等空间受限设备的集成潜力。
创新性分析:
本文的创新点主要在于硬件设计创新,通过超表面投影器结合双螺旋相位编码,突破了传统结构光的基线限制,使其适用于紧凑设备。相比于现有的无基线 3D 成像方案,本方法提供了更清晰的深度信息,同时算法计算量低,适用于高帧率移动平台。这一创新有望推动超表面技术在消费电子、机器人视觉、生物医学成像等领域的应用。
论文重要图文:
摘要:结构光是一种广泛应用的 3D 成像方法,但其主要缺点在于激光投影器和相机传感器之间通常需要较长的基线长度,这限制了其在空间受限场景中的应用。另一方面,被动 3D 成像方法(如基于深度相关点扩散函数(PSF)获取深度)在测量无纹理场景时面临挑战。在此,我们结合结构光和深度相关 PSF 方法的优势,提出了一种无基线结构光 3D 成像系统。该系统利用超表面设计,投影结构化点阵,并在每个点的双螺旋模式中同时编码深度信息。结合简便且快速的算法,我们在多个真实场景(如多个纸箱和真人面部)中实现了高精度 3D 点云获取。这一技术可广泛应用于消费电子和精密测量等领域。
结论:总结而言,我们提出了一种无基线结构光系统,可用于不同真实场景的高精度、快速 3D 成像。该系统通过超表面对光场的亚波长精确操控,实现双螺旋点阵投影,从而在紧凑系统中完成高精度 3D 成像。利用折叠光路实现的单开口配置,可通过标准镜头模组组装大幅缩小体积,适用于智能手机 3D 人脸识别、机器人操作和内窥镜等小型化 3D 成像应用。在对系统厚度敏感的场景(如智能手机)中,可采用 45° 棱镜镜片(类似于潜望式远摄模组)将光学路径旋转 90°,进一步减少系统厚度。
该系统的深度计算算法比现有结构光方法更简洁,可支持高帧率移动平台上的 3D 成像。对于更大视场(FOV)需求,可采用远近场变换方法,无需依赖达曼光栅相位设计中的近轴近似,FOV 可扩展至 180°。类似于三角测量结构光系统中增加基线长度的效果,在无基线系统中增大超表面投影器直径 DDD 也可提高深度测量精度和范围。例如,若想在 100 倍距离范围内保持相同的相对深度测量误差 ,三角测量结构光系统需将基线 增加 100 倍,而本系统仅需将投影器直径 DDD 增加 10 倍。此外,低信噪比(SNR)和超表面制造误差 也是影响当前系统精度的主要因素,可在未来工程实现过程中进一步优化。
通过提高激光源质量和功率 以增强 SNR,改进超表面制造工艺 以及优化超表面设计以提高制造误差容忍度,本系统的 3D 成像精度可进一步提升。这些改进将有助于本系统适应更广泛的应用场景。作为一种紧凑、高精度、可靠的 3D 成像方案,本系统可广泛应用于消费电子、机器人视觉、自动驾驶和生物医学成像等多个领域。
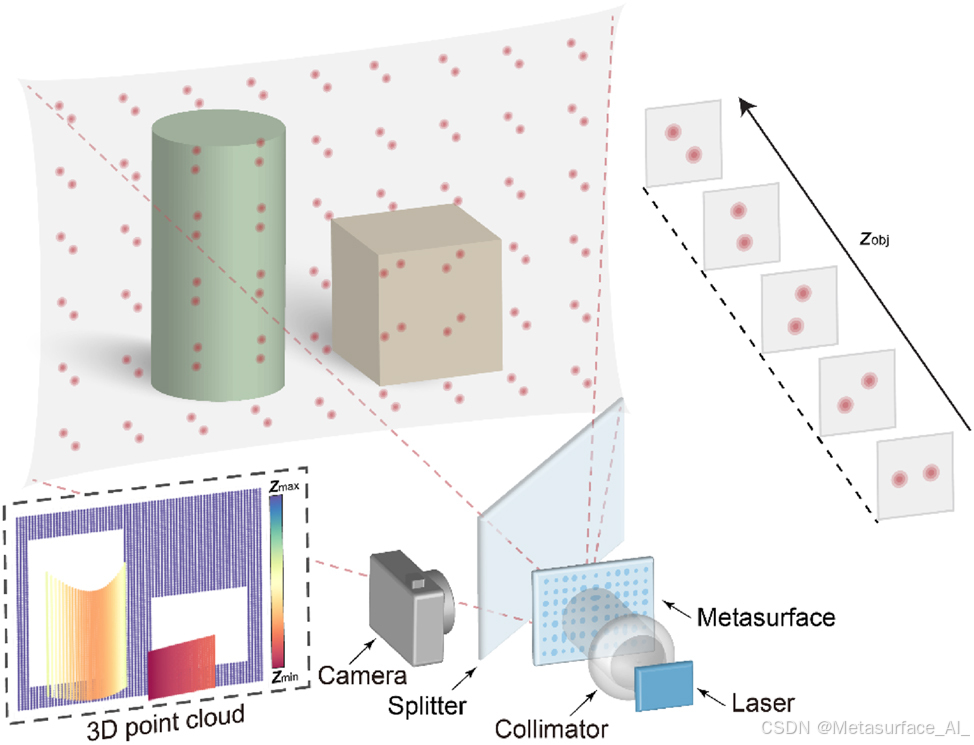
图 1: 基于超表面双螺旋点投影器的无基线结构光 3D 成像系统示意图
投影器的光源为准直激光,经过超表面调制后,投影出带有深度相关双螺旋图案的点阵。每个投影点的双螺旋图案旋转角度可映射至深度值 z obj z_{\text{obj}} z
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











