






第5组第十周直流传动CDIO工作报告

燕骏出品
项目名称:转速无静差单闭环调速系统
项目组别:5
项目组长:朱子文
项目成员:陈纪君、李文超、陶务业、高帅、孟超、马腾、王涛
2017年 5 月 6 日
目录
- 电路焊接
1.1焊接负责人
电路焊接主要负责人为孟超。
电路焊接之前,我们对师兄提供的电路板进行了调试,确定其功能正常后,我们才开始的焊接工作。
1.2焊接电路分析
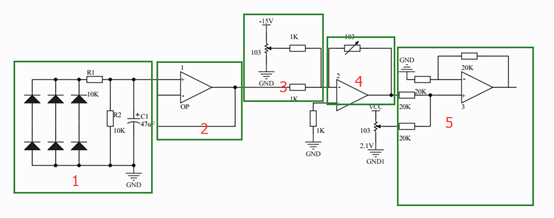
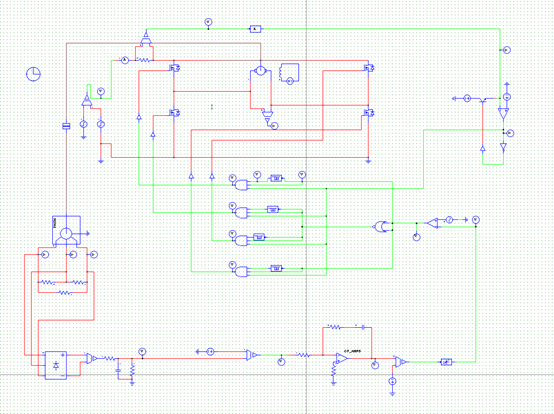
图 1.1 焊接电路图
提供给我们的实验板上预留了一块洞洞板的地方,那里就是我们焊接器件的地方。首先让我们分析一下电路图:
从左到右看起,可以大致分为5部分,分别如下
-
发电机发电后经不控整流桥整流滤波分压
-
取出实际电压后经过电压跟随器,防止受到后续电路影响
-
基准电压部分,实际上也加了一个电压跟随器,然后与第2步电压做差得偏差
-
偏差送入比例调节器进行计算(未考虑限幅)。
-
比例调节器计算输出与 偏置电压做加法运算,输出部分与三角波进行比较。
1.3电路焊接注意事项
a、供电
实验室提供两片358运放,358内部其实是双运放。一般运放使用双电源供电,而我们的电路板上并没有负电源,所以我们需要考虑从外部+-15v稳压模块中取得负电压。
b、焊接技巧
注意芯片引脚顺序,同时应该提前想好器件的布局,这一点我们并没有做好,布局比较难看。最后是焊接前仔细检查。
- 单闭环调速系统参数设计
本任务主要负责人:陶务业、陈纪君、朱子文、高帅
2.1给定参数与设计要求
1.电动机参数:




2.要求调速范围

3.测速发电机TG参数:
2.2仿真参数计算
参数计算及MATLAB仿真:
(1)计算闭环系统开环放大系数
假设开环时静差率s≤5%,则此时额定负载时的稳态速降为

电动机的电动势系数为
开环系统额定速降为
闭环系统的开环放大系数应为
若要保持稳定,则
综上所述,取K=100。
-
计算反馈环节的反馈系数
已知额定转速下测速发电机输出三相线电压为
经过整流后的电压为
设定参考电压为
,则此时反馈系数为
-
无pid环节的闭环系统开环传函
系统机电时间常数为
电枢回路电磁时间常数为
电力电子变换器时间常数为
整理得系统的开环传函为
(1-1)
系统的伯德图如下:
图2.1 未加pid环节时闭环系统的开环传函bode图
从图中可以看出,系统以20倍分频穿越0分贝线,但相角裕度为25.9度,系统不稳定。
-
加入pid环节的闭环系统的开环传函
因
,设定
,则
由式(1-1)可得三个转折频率分别为
Pid环节传递函数为
,可令
,使时间常数最大的惯性环节对消。
由图1可得,原系统的穿越频率为
取
,则对应
所以
可得
,
整理得加入pid环节的系统的开环传函为
对应bode图如下:
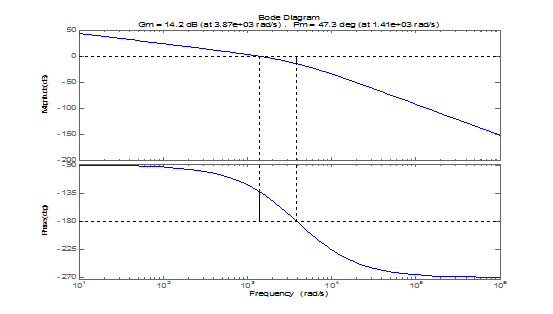
图2.2 加pid环节时闭环系统的开环传函bode图
由图可以看出,系统以20倍分频穿过0分贝线,且相角裕度为47.3度,系统稳定。且低频段相对于未加PI校正前,斜率陡,增益高,所以系统稳态精度较高。
-
加入pid环节系统的闭环传函
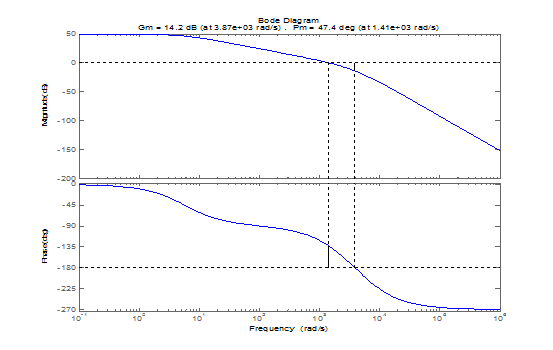
对应伯德图如下:
图2.3 加pid环节时闭环系统的闭环传函bode图
-
Simulink仿真
图2.4 simulink仿真框图
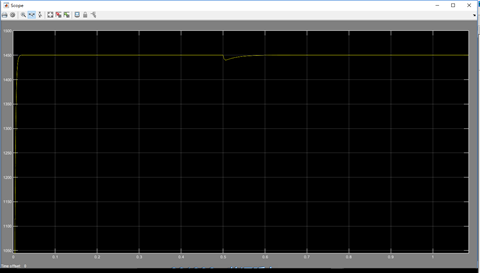
我们将上述计算的参数转换成simulink的仿真框图,在0.5s的时候加上1v扰动。给定的信号是5v,这样经过我们的转换对应的电压应该是输出1450转。仿真波形如下:
图 2.5 simulink仿真波形
分析波形,我们很郁闷,竟然没有超调。。。我们暂时不清楚,为什么没有超调,为什么
- 电路设计
主要负责人:李文超、朱子文
4.1 整体电路设计
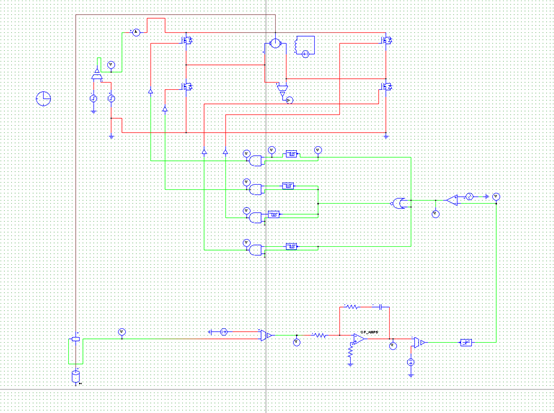
图 4.2 带发电机整体电路图
由于发电机等参数未知,我们对于使用发电机作为测速装置测电压后反馈,也存在问题。问题如下:
-
发电机无法产生220v(有效值)电压正弦电压
-
加入扰动后,波形未产生变化
图 4.3 直接使用转速传感器仿真
4.2模块化分析
-
主电路
主电路我们采用H桥电路,通过改变导通占空比可以调节电机得转速以及方向。
-
整流电路
采用三相同步电机反应转速,电机输出采样得到的是三相交流电压,通过不控整流电路得到直流电压,为使得整流输出更加平滑,在整流输出加上RC滤波电路。
-
偏差计算输出电路(偏差、PI、加法、限幅)
将整流得到的直流电压与给定电压(5.1V)送入到减法器得到二者得差值Un,将偏差电压Un作为PI调节器的输入,在PI输出电压与基准电压相加后加一个限压器(0.9 – 3.3v),将得到的电压与三角载波(0.9V-3.3V,6000kHz)比较,最终形成PWM波,把PWM分为四路,其中两位取反作为2,3开关信号,另外两位保持作为1,4路信号,然后加入死区,这样形成的四路PWM波荆轲作为我们需要的四路开关信号实现电机转速和转向的调节功能。
-
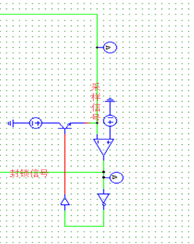
保护电路
在主电路上串联一个阻值非常小的采样电阻(1u),将主电路的电流信号转化成电压信号,然后将此电压信号与一个给定电压值作比较,当主电路中电流达到预设值时比较器会反转,将此信号与PWM波作与,可以实现对电路的封锁,然后将比较器输出信号取反控制一个高电压的接通到比较端,可以实现封锁保持,避免当电路封锁后电流降低,封锁失效,导致电流又一次过载封锁电路进而再一次封锁这种无限循环的情况出现。
图 4.5 电流保护电路
-
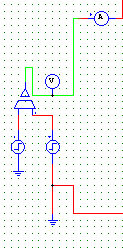
负载侧加扰动电路
图 4.6 电机供电电压扰动电路
我们直接在电压测,2s后加入10v电压扰动。
-
仿真与分析
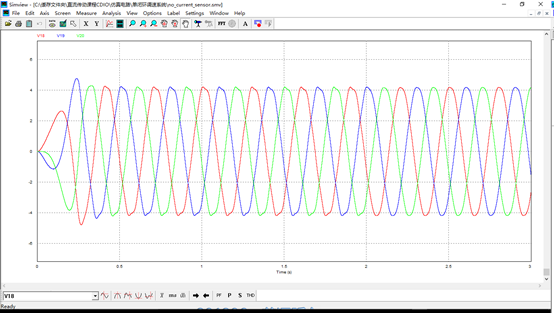
- 发电机输出波形
图5.1 发电机波形
由于时间关系,我们还没能仿真完,后续将对遇到的问题进行仿真分析。
- 总结与下周计划安排
-
分析simulink波形为什么没有超调
-
继续完成psim的电路仿真。
-
完成CDIO实验
-
分析并设计双闭环系统
-




























 3273
3273

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









