







在C++中,联编是指一个计算机程序的不同部分彼此关联的过程。按照联编所进行的阶段不同,可分为两种不同的联编方法:静态联编和动态联编。
1. 静态联编
静态联编是指联编工作在编译阶段完成的,这种联编过程是在程序运行之前完成的,又称为早期联编。要实现静态联编,在编译阶段就必须确定程序中的操作调用(如函数调用)与执行该操作代码间的关系,确定这种关系称为束定,在编译时的束定称为静态束定。静态联编对函数的选择是基于指向对象的指针或者引用的类型。其优点是效率高,但灵活性差。
例1:静态联编
#include"iostream.h"
class A
{public:
void f(){cout<<"A"<<"";}
};
classB:publicA
{public:
voidf(){cout<<"B"<<endl;}
};
Void main()
{A*pa=NULL;
Aa;Bb;
pa=&a;pa->f();
pa=&b;pa->f();
}该程序的运行结果为:A A
从例1程序的运行结果可以看出,通过对象指针进行的普通成员函数的调用,仅仅与指针的类型有关,而与此刻指针正指向什么对象无关。要想实现当指针指向不同对象时执行不同的操作,就必须将基类中相应的成员函数定义为虚函数,进行动态联编。
2. 动态联编
动态联编是指联编在程序运行时动态地进行,根据当时的情况来确定调用哪个同名函数,实际上是在运行时虚函数的实现。这种联编又称为晚期联编,或动态束定。动态联编对成员函数的选择是基于对象的类型,针对不同的对象类型将做出不同的编译结果。C++中一般情况下的联编是静态联编,但是当涉及到多态性和虚函数时应该使用动态联编。动态联编的优点是灵活性强,但效率低。
动态联编规定,只能通过指向基类的指针或基类对象的引用来调用虚函数,其格式为:指向基类的指针变量名->虚函数名(实参表)或基类对象的引用名.虚函数名(实参表)
实现动态联编需要同时满足以下三个条件:
① 必须把动态联编的行为定义为类的虚函数。
② 类之间应满足子类型关系,通常表现为一个类从另一个类公有派生而来。
③ 必须先使用基类指针指向子类型的对象,然后直接或者间接使用基类指针调用虚函数。
例2:动态联编
#include"iostream.h"
classA
{public:
Virtual voidf()//虚函数
{cout<<"A"<<"";}};
classB:publicA
{public:
Virtual voidf()//虚函数
{cout<<"B"<<endl;}
};
voidmain()
{ A*pa=NULL;
Aa;Bb;
pa=&a;
pa->f();
pa=&b;
pa->f();
}该程序的运行结果为:A B
从例2程序的运行结果可以看出,将基类A中的函数f定义为虚函数后,当指针指向不同对象时执行了不同的操作,实现了动态联编。
3. 动态联编分析
动态联编要求派生类中的虚函数与基类中对应的虚函数具有相同的名称、相同的参数个数和相同的对应参数类型、返回值或者相同,或者都返回指针或引用,并且派生类虚函数所返回的指针或引用的基类型是基类中虚函数所返回的指针或引用的基类型的子类型。如果不满足这些条件,派生类中的虚函数将丢失其虚特性,在调用时进行静态联编。
例3:通过指向基类的指针来调用虚函数
#include"iostream.h"
Class base
{
public:
virtual void fun1(){cout<<"base fun1"<<endl;}
virtual void fun2(){cout<<"base fun2"<<endl;}
void fun3(){cout<<"base fun3"<<endl;}
void fun4(){cout<<"base fun4"<<endl;}
};
Class derived:public base
{
public:
Virtual void fun1(){cout<<"derived fun1"<<endl;}
Virtual void fun2(intx){cout<<"derived fun2"<<endl;}
Virtual void fun3(){cout<<"derived fun3"<<endl;}
Void fun4(){cout<<"derived fun4"<<endl;}
};
Void main()
{
base*pb;
derivedd;
pb=&d;//通过指向基类的指针来调用虚函数pb->fun1();pb->fun2();pb->fun3();pb->fun4();
}该程序的运行结果:
Derived fun1
base fun2
base fun3
base fun4
本例中函数fun1在基类base和派生类derived中均使用了关键字virtual定义为虚函数,并且这两个虚函数具有相同的参数个数、参数类型和返回值类型。因此,当指针pb访问fun1函数时,采用的是动态联编。函数fun2在基类base和派生类de-rived中定义为虚函数,但这两个虚函数具有不同的参数个数。函数fun2丢失了其虚特性,在调用时进行静态联编。函数fun3在基类base中说明为一般函数,在派生类derived中定义为虚函数。在这种情况下,应该以基类中说明的成员函数的特性为标准,即函数fun3是一般成员函数,在调用时采用静态联编。函数fun4在基类base和派生类derived中均说明为一般函数,因此基类指针pb只能访问base中的成员。
例4:通过基类对象的引用来调用虚函数
#include"iostream.h"
Class CPoint
{public:
CPoint(doublei,doublej){x=i;y=j;}
Virtual double Area(){return 0.0;}
private:
doublex,y;
};
Class CRectangle:public CPoint
{public:
CRectangle(double i,double j,double k,double l);
Double Area(){return w*h;}
private:
double w,h;
};
CRectangle::CRectangle(double i,double j,double k,double l):CPoint(i,j)
{ w=k;h=l; }
Void fun(CPoint &s)
{ cout<<s.Area()<<endl; }//通过基类对象的引用来调用虚函数Void main()
{
CRectangle rec(3.0,5.2,15.0,25.0);
fun(rec);
}该程序的运行结果为:375
例4中的成员函数Area在基类CPoint中使用了关键字virtual定义为虚函数,在派生类CRectangle中定义为一般函数,但是进行了动态联编,结果为15*25即375。这是因为一个虚函数无论被公有继承多少次,它仍然保持其虚特性。在派生类中重新定义虚函数时,关键字virtual可以写也可不写,但为了保持良好的编程风格,避免引起混乱时,应写上该关键字。
4. 静态联编分析
template <class T>
class CShape
{
public:
CShape(){}
virtual ~CShape(){}
virtual void Draw() = 0;
};
class CPoint : public CShape
{
public:
CPoint(){}
~CPoint(){}
void Draw()
{
printf("Hello! I am Point!/n");
}
};
class CLine : public CShape
{
public:
CLine(){}
~CLine(){}
void Draw()
{
printf("Hello! I am Line!/n");
}
};
void DrawShape(T* t)
{
t->Draw();
}void main()
{
CShape* shape = new CPoint(); //draw point shape->Draw(); DrawShape<CPoint>((CPoint*)shape);
delete shape;
shape = new CLine(); //draw Line shape->Draw(); DrawShape<CLine>((CLine*)shape); delete shape; return ;
}假设我们有这样的一个类:
class Base {
public:
virtual void f() { cout << "Base::f" << endl; }
virtual void g() { cout << "Base::g" << endl; }
virtual void h() { cout << "Base::h" << endl; }
};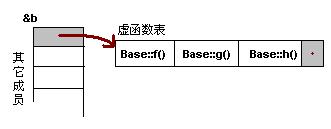
注意:在上面这个图中,我在虚函数表的最后多加了一个结点,这是虚函数表的结束结点,就像字符串的结束符“/0”一样,其标志了虚函数表的结束。这个结束标志的值在不同的编译器下是不同的。在WinXP+VS2003下,这个值是NULL。而在Ubuntu 7.10 + Linux 2.6.22 + GCC 4.1.3下,这个值是如果1,表示还有下一个虚函数表,如果值是0,表示是最后一个虚函数表。
下面,我将分别说明“无覆盖”和“有覆盖”时的虚函数表的样子。没有覆盖父类的虚函数是毫无意义的。我之所以要讲述没有覆盖的情况,主要目的是为了给一个对比。在比较之下,我们可以更加清楚地知道其内部的具体实现。
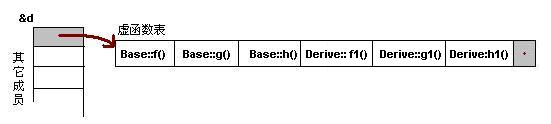
一般继承(无虚函数覆盖)
下面,再让我们来看看继承时的虚函数表是什么样的。假设有如下所示的一个继承关系:
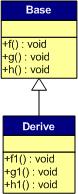
请注意,在这个继承关系中,子类没有重载任何父类的函数。那么,在派生类的实例中,其虚函数表如下所示:
对于实例:Derive d; 的虚函数表如下:
一般继承(有虚函数覆盖)
覆盖父类的虚函数是很显然的事情,不然,虚函数就变得毫无意义。下面,我们来看一下,如果子类中有虚函数重载了父类的虚函数,会是一个什么样子?假设,我们有下面这样的一个继承关系。
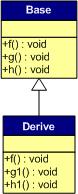
为了让大家看到被继承过后的效果,在这个类的设计中,我只覆盖了父类的一个函数:f()。那么,对于派生类的实例,其虚函数表会是下面的一个样子:
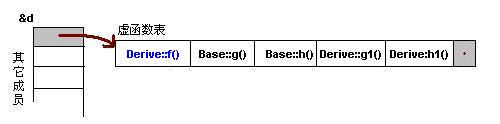
我们从表中可以看到下面几点,
1)覆盖的f()函数被放到了虚表中原来父类虚函数的位置。
2)没有被覆盖的函数依旧。
这样,我们就可以看到对于下面这样的程序,
Base *b = new Derive();
b->f();由b所指的内存中的虚函数表的f()的位置已经被Derive::f()函数地址所取代,于是在实际调用发生时,是Derive::f()被调用了。这就实现了多态。
多重继承(无虚函数覆盖)
下面,再让我们来看看多重继承中的情况,假设有下面这样一个类的继承关系。注意:子类并没有覆盖父类的函数。
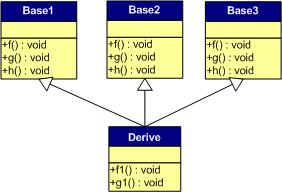
对于子类实例中的虚函数表,是下面这个样子:
我们可以看到:
1) 每个父类都有自己的虚表。
2) 子类的成员函数被放到了第一个父类的表中。(所谓的第一个父类是按照声明顺序来判断的)
这样做就是为了解决不同的父类类型的指针指向同一个子类实例,而能够调用到实际的函数。
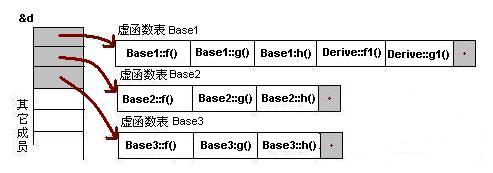
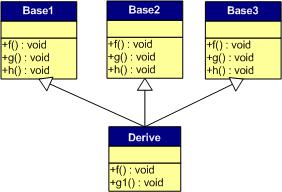
多重继承(有虚函数覆盖)
下面我们再来看看,如果发生虚函数覆盖的情况。
下图中,我们在子类中覆盖了父类的f()函数。
下面是对于子类实例中的虚函数表的图:

我们可以看见,三个父类虚函数表中的f()的位置被替换成了子类的函数指针。这样,我们就可以任一静态类型的父类来指向子类,并调用子类的f()了。如:
Derive d;
Base1 *b1 = &d;
Base2 *b2 = &d;
Base3 *b3 = &d;
b1->f(); //Derive::f()
b2->f(); //Derive::f()
b3->f(); //Derive::f()
b1->g(); //Base1::g()
b2->g(); //Base2::g()
b3->g(); //Base3::g()安全性
每次写C++的文章,总免不了要批判一下C++。这篇文章也不例外。通过上面的讲述,相信我们对虚函数表有一个比较细致的了解了。水可载舟,亦可覆舟。下面,让我们来看看我们可以用虚函数表来干点什么坏事吧。
一、通过父类型的指针访问子类自己的虚函数
我们知道,子类没有重载父类的虚函数是一件毫无意义的事情。因为多态也是要基于函数重载的。虽然在上面的图中我们可以看到Base1的虚表中有Derive的虚函数,但我们根本不可能使用下面的语句来调用子类的自有虚函数:
Base1 *b1 = new Derive();
b1->f1(); //编译出错二、访问non-public的虚函数
另外,如果父类的虚函数是private或是protected的,但这些非public的虚函数同样会存在于虚函数表中,所以,我们同样可以使用访问虚函数表的方式来访问这些non-public的虚函数,这是很容易做到的。
如:
class Base {
private:
virtual void f() { cout << "Base::f" << endl; }
};class Derive : public Base{
};
typedef void(*Fun)(void);
void main() {
Derive d;
Fun pFun = (Fun)*((int*)*(int*)(&d)+0);
pFun();
}














 573
573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









