本文主要介绍如何利用MATLAB中的GUI工具来制作串口通信上位机,然后利用单片机读取陀螺仪MPU6050的
数据传送到上位机,利用上位机将数据利用绘图实时显示出来,有一部分是参考网上其它教程,
将在结尾给出参考网址。
一、总体设计原理
PC机有USB接口,可以实现串口通信,通过USB转串口数据线连接单片机,用三根线(收、发、地)来实现数
据的发送,用PL-2303HX作为单片机与PC机间的驱动芯片。串口通信总体设计原理图如图1所示。
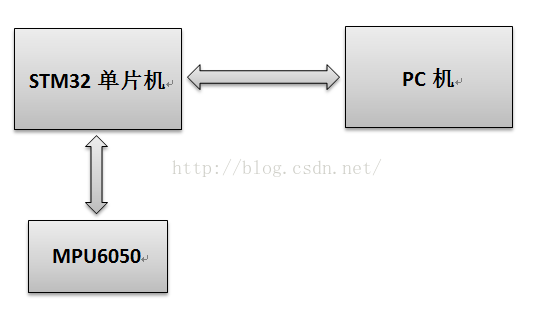
图1
二、MATLAB的GUI串口通信设计
GUIDE是一个专用于GUI程序设计的向导设计器。而GUI是由各种图形对象,如图形窗口、图轴、菜单、按钮、
文本框等构建的用户界面,是人机交互的有效工具和方法,通过GUIDE可以很方便地设计出各种符合要求的
图形用户界面。用户可以根据界面提示完成整个工程,却不必去了解工程内部是如何工作的。GUI设计既
可以以基本的MATLAB程序设计为主,也可以以鼠标为主利用GUIDE工具进行设计,
也可综合以上两种方法进行设计。
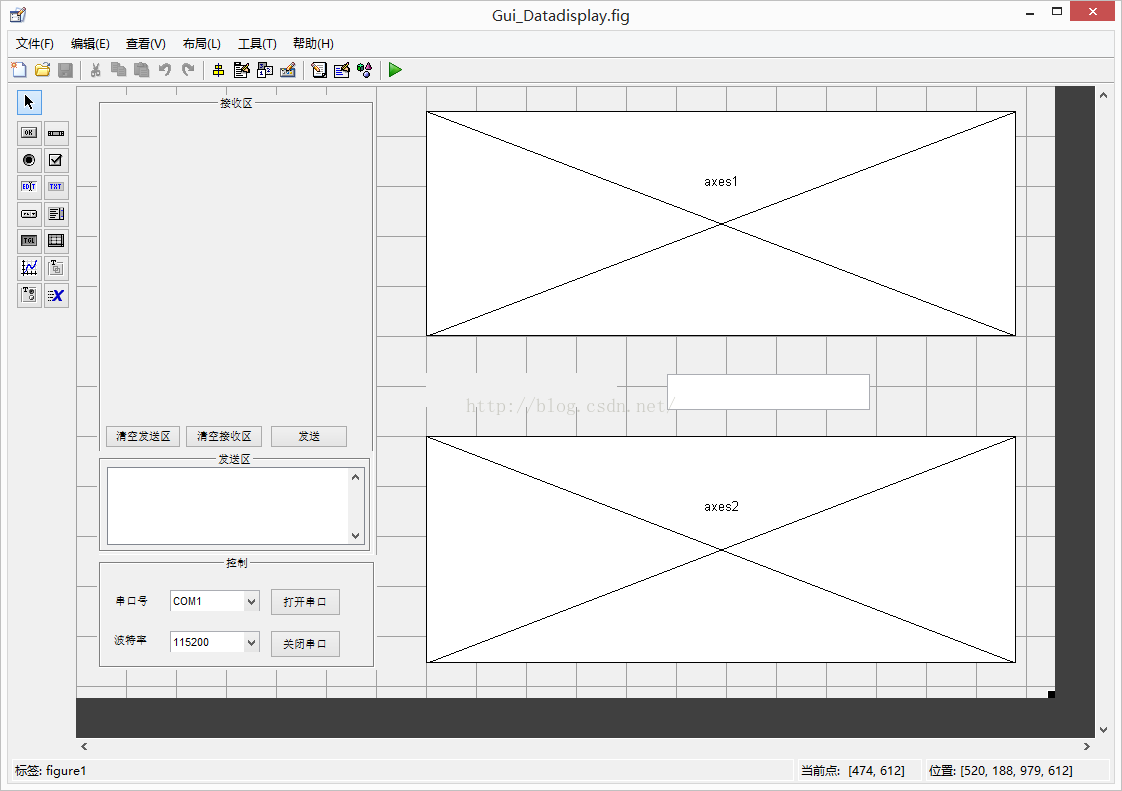
2.1 GUI界面的整体布局设计
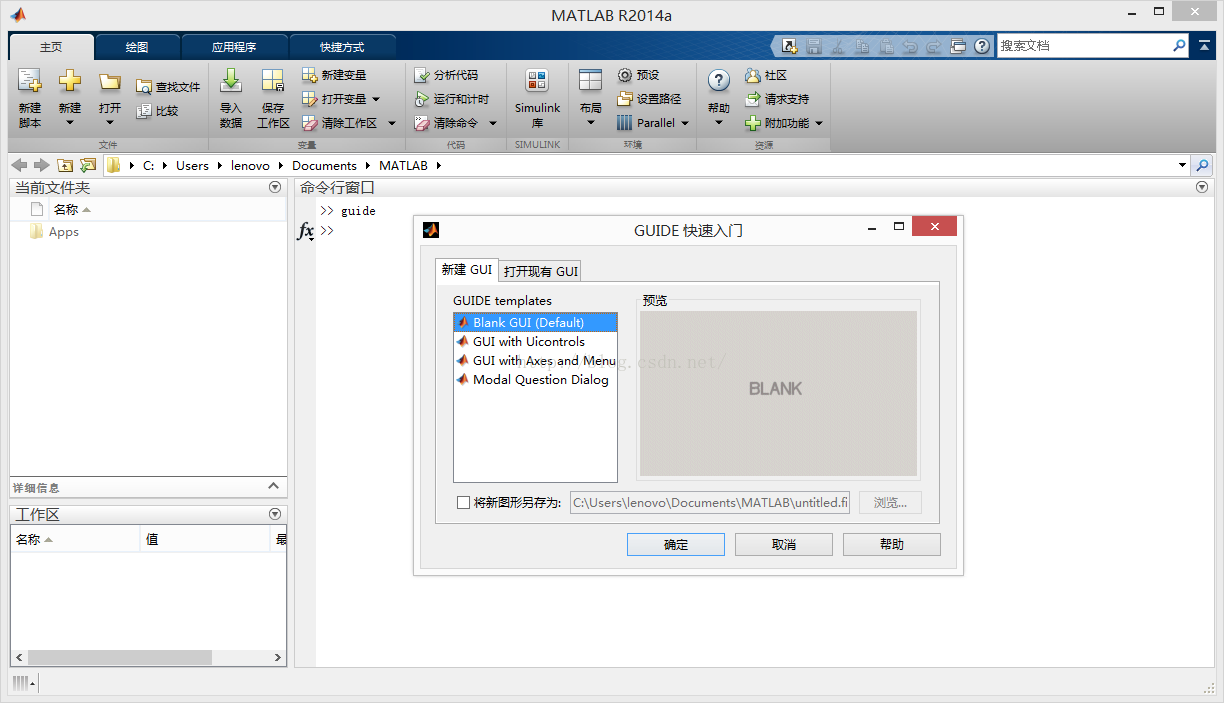
利用MATLAB的GUI界面设计程序界面和功能,利用MATLAB R2014a来实现设计,打开MATLAB后:
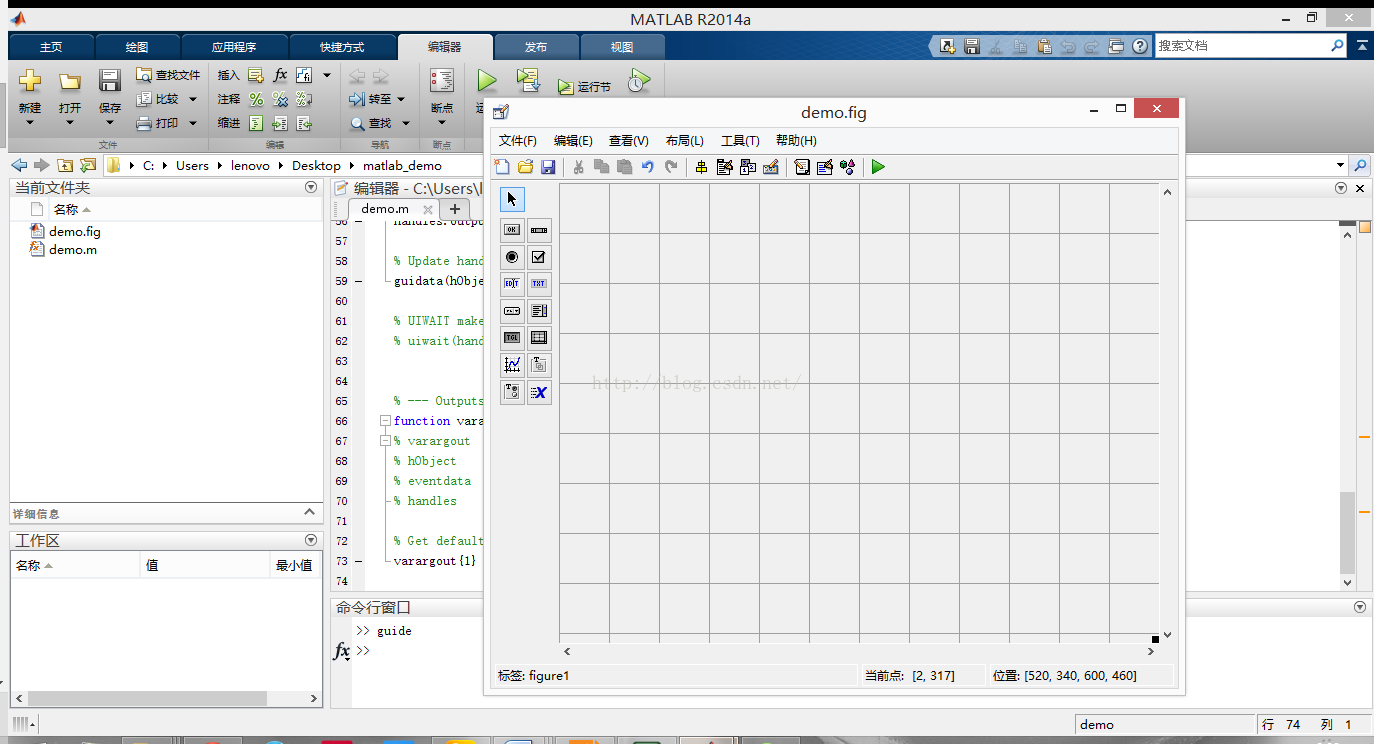
1、在命令行窗口输入”guide”调出GUIDE工具,如图2
图2
2、直接选择默认方式,勾选“将新图形另存为”,选择自己要存的位置,然后点击OK。出现如下图3所示:
图3
3、MALTAB的GUI主要由两个文件,当设置好GUIDE时点击保存,这时将在当前路径自动产生两个名字相同的文件,但扩展标识符不同,一个为.fig文件,一个为.m文件,.fig主要是GUI图形文件,和GUIDE设计的图像相同,.m文件为程序文件,所有事件响应和计算功能都在这里实现。
在图4中,可以在左侧的控件栏拖曳控件到右侧网格中,如图4
图4
4、控件设置,右击控件点“Property Inspector”或双击控件,如图5
图5
一般仅设置Tag选项和String选项。其中String选项在按钮控件中就是GUI显示时的字符。Tag属性较为重要,在GUI编程时控件的索引主要利用Tag选项的属性并且在GUI生成回调函数时候也是由Tag属性的值命名的。这里将“打开串口”按钮控件的String设置为“打开串口”,tag设置为pbOpenSerial。
5、其他设置可重复以上步骤来放置和设置各个控件,都所有控件设置好之后,要保存一下,然后点击右侧的“.m”文件可以看到相对应的控件的程序设计区。
MATLAB的按钮以及各种控件事件响应是依靠一种叫做回调函数(Callback Function)来实现的,自动生成的M文件中已经自动做好回调函数的名称和参数了,我们需要做的就是在其中添加你要进行的处理。
例如:我们要在鼠标单击按钮“打开串口”时进行一系列的串口初始化动作,这时右键单击“打开串口按钮”如图6,7
图6
图7
按钮的Tag为pbOpenSerial,所以GUIDE自动生成的回调函数名为pbOpenSerial_Callback,函数有3个参数
·hObject是当前控件对象,即打开串口按钮对象(面向对象技术中的概念),索引或设置当前对象(打开串口按钮对象)时只需要引用hObject就可以了。例如:改变当前空间的可见性,只需调用set(hObject,'Visable','off');打开串口对象在单击该按钮时即会隐藏。
·eventdata我暂时没有用到,所以暂且不管他
·handles我理解是整个GUI界面的索引句柄,所有GUI界面上的控件都可以通过他来索引,几乎有全局作用域,例如在打开串口按钮的回调中要将关闭串口按钮显示出来,可以这样调用:
set(handles. pbOpenSerial,'Visable','on');就可以了!
这里handles还有一个作用就是在不同控件间进行参数传递,只要对handle的成员变量进行赋值就可以了。当然后面要调用一下guidata(hObject,handles);将变量保存。
例如打开串口按钮里面有个数据10需要关闭串口按钮调用可以这样写。
%打开串口按钮回调函数中
handles.double_vir=10;
guidata(hObject, handles);
%关闭串口按钮回调函数中
a=handles.double_vir;
2.2 MATLAB对串口的控制
(1)MATLAB中主要是创建串行口设备对象,这里用到主要函数是serial();
s=serial(‘COM1’);%创建COM1为串口对象,并用s标识。
(2)然后是定义串口设备对象的通信属性,主要有波特率,异步串行格式(包括起始位、数据位、校验位、停止位等)和输出输入缓冲的大小等;
(3)用函数fopen()实现设备对象与硬件设备的软连接(相对于硬件设备的连接),这样就可以对数据的读写操作;
fopen(s)%打开s标识的串口;
(4)进行MATLAB串行读写操作,主要用到的函数有fscanf()等;
(5)关闭设备对象,用到了fclose()等函数。
在对串口按钮初始化中,采用触发中断的方式来进行事件的处理,要设置串口事件回调设置与回调函数,如下部分程序
%串口事件回调设置
s.BytesAvailableFcnMode='terminator';
s.BytesAvailableFcnCount=10;%输入缓冲区存在10个字节触发回调函数
s.BytesAvailableFcn={@EveBytesAvailableFcn,handles};%回调函数的指定
fopen(s);%打开串口
%回调函数
function EveBytesAvailableFcn(t,event,handles )
2.3 各控件的回调函数
- <div><pre name="code" class="html">(1)初始设置一下系统openingFcn函数</strong>
- function Gui_Datadisplay_OpeningFcn(hObject, eventdata, handles, varargin)
- <span style="font-family: Arial, Helvetica, sans-serif;">% This function has no output args, see OutputFcn.</span>
- % hObject handle to figure
- % eventdata reserved - to be defined in a future version of MATLAB
- % handles structure with handles and user data (see GUIDATA)
- % varargin command line arguments to Gui_Datadisplay (see VARARGIN)
-
- global COM;
- global rate;
- COM='COM7'%打开GUI界面时默认是COM7
- rate = 115200;
- set(handles.ppCOM,'value', 7);
- set(handles.ppBaudRates,'value',1);
- set(handles.pbCloseSerial,'Enable','off');</strong></span>
- <strong>(2)Open Serial控件的回调函数</strong>
- function pbOpenSerial_Callback(hObject, eventdata, handles)
- % hObject handle to pbOpenSerial (see GCBO)
- % eventdata reserved - to be defined in a future version of MATLAB
- % handles structure with handles and user data (see GUIDATA)
- clc
- instrreset
- global s;
- global rate;
- global COM;
- global out;
- out=1;
-
- s=serial(COM);
- set(s,'BaudRate',rate);%%%Baud¯
- set(s,'DataBits',8);%%%
- set(s,'StopBits',1);%%%
- set(s,'InputBufferSize',1024000);%%%
- set(handles.pbOpenSerial,'Enable','off');
- set(handles.pbCloseSerial,'Enable','on');
- %串口事件回调设置
- s.BytesAvailableFcnMode='terminator';
- s.BytesAvailableFcnCount=10; %
- s.BytesAvailableFcn={@EveBytesAvailableFcn,handles};
- fopen(s);%
- global count;
- count=1;
- fprintf('ceshi_dakaichuankou\n');</strong></span>
- <div><pre name="code" class="html">(3)当串口中断触发时,事件中断回调函数</strong></span>
- function EveBytesAvailableFcn( t,event,handles )
- global s;
- global a;
- global d;
- global arrX;
- global arrY;
- global arrZ;
- global count;
-
- arrX=zeros([1,100]);
- % arrY=[1,1000];
- % arrZ=[1,1000];
- % fprintf('Receive callback');
- a=fscanf(s);%取出串口中陀螺仪数据
- M=textscan(a,'%s%d%d%d','delimiter',' ');
- % data = [data , '\n'];
- [Name,x,y,z] = deal(M{:});
- arrX(1,count) = x;
- % arrY(1,count) = y;
- % arrZ(1,count) = z;
- a = strcat(a ,char(10), get(handles.editR,'string'));
- set(handles.editR,'string',a);
- set(handles.text4,'string',x);
- plot(arrX);
- hold on;
- count=count+1;
- if count==100
- count=1;
- clf;
- end</strong></span>
- <pre name="code" class="html">(4)COM口选择回调函数</strong></span>
- function ppCOM_Callback(hObject, eventdata, handles)
- global COM;
- rate=1;
- val=get(hObject,'value');
- switch val
- case 1
- COM='COM1';
- fprintf('ceshi_COM=1\n');
- case 2
- COM='COM2';
- case 3
- COM='COM3';
- case 4
- COM='COM4';
- case 5
- COM='COM5';
- case 6
- COM='COM6';
- case 7
- COM='COM7';
- fprintf('ceshi_COM=7\n');
- case 8
- COM='COM8';
- case 9
- COM='COM9';
- End
- </strong></span>
- <pre name="code" class="html"><pre name="code" class="html"><span style="font-family: Arial, Helvetica, sans-serif;">(5)波特率选择回调函数</span>
- function ppBaudRates_Callback(hObject, eventdata, handles)
- global rate;
- val=get(hObject,'value');
- switch val
- case 1
- rate=115200;
- case 2
- rate=9600;
- end
- </strong></span>
- <pre name="code" class="html">(6)关闭串口回调函数</strong></span>
- function pbCloseSerial_Callback(hObject, eventdata, handles)
- global s;
- fclose(s);
- delete(s);
- set(handles.pbOpenSerial,'Enable','on');
- set(handles.pbCloseSerial,'Enable','off');
- fprintf('Close_COM');
- (7)发送回调函数
- function pbSend_Callback(hObject, eventdata, handles)
- global d;
- d=get(handles.editT,'String');
- set(handles.Value,'string',d);</strong></span>
- (8)清空发送区回调函数
- function pbClearT_Callback(hObject, eventdata, handles)
- set(handles.editT,'string','');
- (9)清空接收区回调函数
- function pbClearR_Callback(hObject, eventdata, handles)
- set(handles.editR,'string','');
- set(handles.Value,'string','');
- set(handles.text4,'string','');</strong></span>
三、单片机串口发送
这一部分由个人不同的单片机发送的形式不一样,所以就不在此列举了。主要列出一下主函数参考。
- <pre name="code" class="html">利用STM32接收到三轴加速度计MPU6050的数据,并将数据发送到串口
- int main(void)
- {
- USART1_Config();
- I2C_MPU6050_Init();
- InitMPU6050();
- /***********************************************************************/
- while(1)
- {
- printf("Hello !");
-
- printf("\r\n---------XYZ-------%d\r\n",GetData(ACCEL_XOUT_H));
- printf("\r\n---------XYZ------- %d \r\n",GetData(ACCEL_YOUT_H));
- printf("\r\n---------XYZ------ %d \r\n",GetData(ACCEL_ZOUT_H));
- printf("\r\n \r\n");
-
- printf("\r\n--------------------------------------\r\n");
- printf("\r\n \r\n \r\n \r\n \r\n \r\n");
-
- delay_ms(8);
- }
- }
四、运行结果
单片机发送数据到PC,可利用MATLAB进行对数据的处理,在控制领域中有着广泛的应用。结果如图8,9.
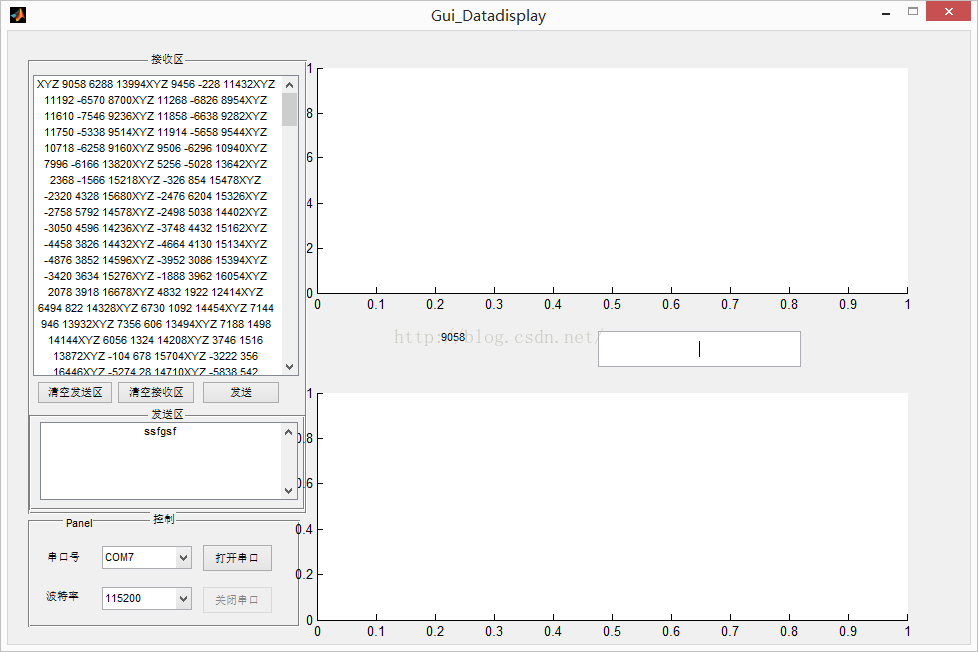
图8
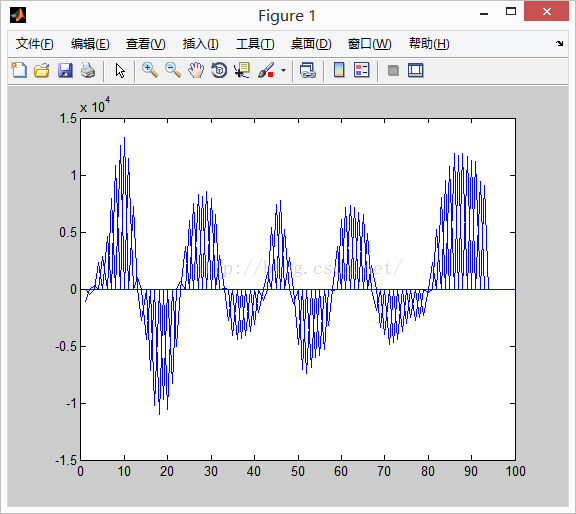
图9
主要参考来源:
http://blog.sina.com.cn/s/blog_4b94ff130100e7wt.html
http://d.g.wanfangdata.com.cn/Periodical_xddzjs201009012.aspx
http://d.g.wanfangdata.com.cn/Periodical_csjsllyj2011231494.aspx
资料附件:http://download.csdn.net/detail/u013381608/9092681
转载于http://blog.csdn.net/u013381608/article/details/48317225



























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









