







矩特征主要表征了图像区域的几何特征,又称为几何矩, 由于其具有旋转、平移、尺度等特性的不变特征,所以又称其为不变矩。在图像处理中,几何不变矩可以作为一个重要的特征来表示物体,可以据此特征来对图像进行分类等操作。如果想详细了解不变矩的概念、公式等请参考下面的论文:
不变矩方法研究
一种实用的不变矩计算方法
http://download.csdn.net/source/1943495
1. HU矩
几何矩是由Hu(Visual pattern recognition by moment invariants)在1962年提出的,图像f(x,y)的(p+q)阶几何矩定义为
Mpq =∫∫(x^p)*(y^q)f(x,y)dxdy(p,q = 0,1,……∞)
矩在统计学中被用来反映随机变量的分布情况,推广到力学中,它被用作刻画空间物体的质量分布。同样的道理,如果我们将图像的灰度值看作是一个二维或三维的密度分布函数,那么矩方法即可用于图像分析领域并用作图像特征的提取。最常用的,物体的零阶矩表示了图像的“质量”:
Moo= ∫∫f(x,y )dxdy
一阶矩(M01,M10)用于确定图像质心( Xc,Yc):
Xc = M10/M00;Yc = M01/M00;
若将坐标原点移至 Xc和 Yc处,就得到了对于图像位移不变的中心矩。如
Upq =∫∫[(x-Xc)^p]*[(y-Yc)^q]f(x,y)dxdy。
Hu在文中提出了7个几何矩的不变量,这些不变量满足于图像平移、伸缩和旋转不变。如果定义
Zpq=Upq/(U20 + U02)^(p+q+2),
Hu 的7种矩为:
H1=Z20+Z02;H1=(Z20+Z02)^2+4Z11^2;......
矩是描述图像特征的算子,它在模式识别与图像分析领域中有重要的应用.迄今为止,常见的矩描述子可以分为以下几种:几何矩、正交矩、复数矩和旋转矩.其中几何矩提出的时间最早且形式简单,对它的研究最为充分。几何矩对简单图像有一定的描述能力,他虽然在区分度上不如其他三种矩,但与其他几种算子比较起来,他极其的简单,一般只需用一个数字就可表达。所以,一般我们是用来做大粒度的区分,用来过滤显然不相关的文档。
比如在图形库中,可能有100万幅图,也许只有200幅图是我们想要的。使用一维的几何矩的话,就可以对几何矩进行排序,建立索引,然后选出与目标图的几何矩最近的2000幅图作比较就好了。而对于其他的矩来说,由于一般是多维的关系,一般不好排序,只能顺序查找,自然速度有巨大的差别.所以。虽然几何矩不太能选出最像的,但可以快速排除不像的,提高搜索效率。
几种简单的几何矩:
令平面上点坐标为P(x,y),重心为C(x!,y!),
二阶行距:rowMoment = [∑(x- x!)*(x- x!)]/A
二阶列距:colMoment = [∑(y- y!)*(y- y!)]/A
A为点的个数。
由以上两个信息可以算出图形的圆度:circleDisgree = rowMoment /colMoment .如果图形的circleDisgree 越小于1,则它越趋向于长轴为y方向的椭圆。如果图形的circleDisgree 越大于1,则它越趋向于长轴为x方向的椭圆.如果图形的circleDisgree 越接近于1,则它越趋向于圆。
所以我们可以使用圆度这种几何矩,对其进行索引,实现快速过滤。
//代码实例
double* Getsquare(int **Array1,int Width,int Height//Array1图像灰度矩阵
{
int x,y;
double pSum,dx,dy;
int xmax,xmin,ymax,ymin,xSum,ySum,PointSum;
double dd,n1,n2,xAve,yAve;
pSum=Height*Width;
xSum=0;ySum=0;PointSum=0;
xmin=10000;ymin=10000;xmax=-1;ymax=-1;
for (y=0 ;y<Height; y++)
{
for (x=0; x<Width; x++)
{
if (Array1[x][y]==255)
{
continue;
}
xSum=xSum+x;ySum=ySum+y;++PointSum;
if (x<xmin)
{
xmin=x;
}
if (x>xmax)
{
xmax=x;
}
}
if (y<ymin)
{
ymin=y;
}
if (y>ymax)
{
ymax=y;
}
}
if (pSum==0)
{
goto Loop;
}
xAve=xSum/pSum;
yAve=ySum/pSum;
///上面为计算x,y平均值
for (x=1; x<16; x++)
{
SqureNumber[x]=0;
}
// 11 20 02 21+ 21- 12+ 12- 30+ 30- 03+ 02-
for (y=0; y<Height; y++)
{
for (x=0; x<Width; x++)
{
if (Array1[x][y]==255)
{
continue;
}
dx=x-xAve;dy=y-yAve;
SqureNumber[1]=SqureNumber[1]+dx*dx; // 计算 u(11) 11
SqureNumber[2]=SqureNumber[2]+dx*dx; // 计算 u(20) 20
SqureNumber[3]=SqureNumber[3]+dy*dy; // 计算 u(02) 02
if (dy>0)
{
SqureNumber[4]=SqureNumber[4]+dx*dx*dy; // 计算 u(21)+ 21+
}
else
{
SqureNumber[5]=SqureNumber[5]+dx*dx*dy; // 计算 u(21)- 21-
}
if( dx>0 )
{
SqureNumber[6]=SqureNumber[6]+dx*dy*dy; // 计算 u(12)+ 12+
}
else
{
SqureNumber[7]=SqureNumber[7]+dx*dy*dy; // 计算 u(12}- 12-
}
if (dx>0 )
{
SqureNumber[8]=SqureNumber[8]+dx*dx*dx ;// 计算 u(30)+ 30+
}
else
{
SqureNumber[9]=SqureNumber[9]+dx*dx*dx; // 计算 u(30)- 30-
}
if (dy>0)
{
SqureNumber[10]=SqureNumber[10]+dy*dy*dy ;// 计算 u(03)+ 03+
}
else
{
SqureNumber[11]=SqureNumber[11]+dy*dy*dy;// 计算 u(03)- 03-
}
}//end for x
}// end for y;
for (x=1; x<12; x++)
{
SqureNumber[x]=SqureNumber[x]/pSum;
}
///计算图像的各阶矩
for (x=12; x<21; x++)
{
SqureNumber[x]=0;
}
SqureNumber[12]=((SqureNumber[2]-SqureNumber[3])/(SqureNumber[2]+SqureNumber[3]))/2; //长宽比特征
dd=sqrt((SqureNumber[2]-SqureNumber[3])*(SqureNumber[2]-SqureNumber[3])+4*SqureNumber[1]*SqureNumber[1]);
dd=dd+(SqureNumber[2]-SqureNumber[3]);
SqureNumber[16]=2*atan(dd/(2*SqureNumber[1]))/M_PI; ///字型倾斜度
dd=sqrt((SqureNumber[2]-SqureNumber[3])*(SqureNumber[2]-SqureNumber[3])+4*SqureNumber[1]*SqureNumber[1]);
n1=((SqureNumber[2]+SqureNumber[3])+dd)/2;
n2=((SqureNumber[2]+SqureNumber[3])-dd)/2;
SqureNumber[14]=(n1-n2)/(n1+n2); //拉长度
n1=sqrt((ymax-ymin)*(xmax-xmin));
dd=sqrt((SqureNumber[2]+SqureNumber[3])/PointSum);
SqureNumber[15]=dd/n1; //伸展度
dd=(SqureNumber[8]-SqureNumber[9])/(SqureNumber[8]+SqureNumber[9]);
SqureNumber[16]=(dd+1)/2; //水平偏移度
dd=(SqureNumber[10]-SqureNumber[11])/(SqureNumber[10]+SqureNumber[11]);
SqureNumber[17]=(dd+1)/2; //垂直偏移度
dd=(SqureNumber[4]-SqureNumber[5])/(SqureNumber[4]+SqureNumber[5]);
SqureNumber[18]=(dd+1)/2; //水平伸展度度
dd=(SqureNumber[6]-SqureNumber[7])/(SqureNumber[6]+SqureNumber[7]);
SqureNumber[19]=(dd+1)/2; //垂直伸展度
Loop:;
}
2.Zernike矩
在模式识别中,一个重要的问题是对目标的方向性变化也能进行识别。Zernike 矩是一组正交矩,具有旋转不变性的特性,即旋转目标并不改变其模值。。由于Zernike 矩可以构造任意高阶矩,所以Zernike 矩的识别效果优于其他方法.
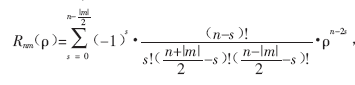
Zernike 提出了一组多项式{ V nm ( x , y) } 。这组多项式在单位圆{ x2 + y2 ≤1} 内是正交的,具有如下形式: V nm ( x , y) = V nm (ρ,θ) = Rnm (ρ) exp ( jmθ) ,并且满足 ∫∫ x^2+y^2 <= 1 [( V nm ( x , y) 的共轭]* V pq ( x , y) d x d y. = [pi/(n+1)]*δnpδmq .
if(a==b) δab = 1 else δab = 0,n 表示正整数或是0;m是正整数或是负整数它表示满足m的绝对值<=n 而且n-m的绝对值是偶数这两个条件;ρ 表示原点到象素(x,y)的向量的距离;θ 表示向量ρ 跟x 轴之间的夹角(逆时针方向).
对于一幅数字图象,积分用求和代替,即A nm =∑x∑y f(x,y) *[( V nm (ρ,θ) 的共轭],x^2+y^2 <=1
实际计算一幅给定图象的Zernike 矩时,必须将图象的重心移到坐标圆点,将图象象素点映射到单位圆内。由以上可知,使[ V nm (ρ,θ) 的共轭]可提取图象的特征,低频特性由n 值小的[( V nm (ρ,θ) 的共轭]来提取,高频特性由n 值大的来提取。Zernike 矩可以任意构造高价矩, 而高阶矩包含更多的图象信息, 所以Zernike 矩识别效果更好。,Zernike 矩仅仅具有相位的移动。
它的模值保持不变。所以可以将| A nm | 作为目标的旋转不变性特征。因为| A nm | =| A n , - m | ,所以只需计算m ≥0 的情况。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











