







对于如何扫描图像的方法实在是太多了,在浏览一些资料的时候也找到了一些好的方法,到最后把这些方法的链接都贴出来,大家有兴趣的可以参考一下,看看哪种方法适合自己,在这里我还是根据OpenCV提供的范例进行分析。
1、建立查找表
颜色缩减方法:如果矩阵元素存储的是单通道像素,使用C或C++的无符号字符类型,那么像素可有256个不同值。但若是三通道图像,这种存储格式的颜色数就太多了(确切地说,有一千六百多万种)。用如此之多的颜色可能会对我们的算法性能造成严重影响。其实有时候,仅用这些颜色的一小部分,就足以达到同样效果。所以其做法是:将现有颜色空间值除以某个输入值,以获得较少的颜色数。例如,颜色值0到9可取为新值0,10到19可取为10,以此类推。其公式为:
即输入的颜色值为:0-9 输出为:0
10-19 10
20-29 20
…… ……
这样的话,简单的颜色空间缩减算法就可由下面两步组成:一、遍历图像矩阵的每一个像素;二、对像素应用上述公式。
由此可知,对于较大的图像,有效的方法是预先计算所有可能的值,然后需要这些值的时候,利用查找表直接赋值即可。查找表是一维或多维数组,存储了不同输入值所对应的输出值,其优势在于只需读取、无需计算。
计算查找表代码为:
int divideWith; // convert our input string to number - C++ style
stringstream s;
s << argv[2];
s >> divideWith;
if (!s)
{
cout << "Invalid number entered for dividing. " << endl;
return -1;
}
uchar table[256];
for (int i = 0; i < 256; ++i)
table[i] = divideWith* (i/divideWith);2、计算运行时间
OpenCV提供了两个简便的可用于计时的函数 getTickCount() 和 getTickFrequency() 。第一个函数返回你的CPU自某个事件(如启动电脑)以来走过的时钟周期数,第二个函数返回你的CPU一秒钟所走的时钟周期数。这样,我们就能轻松地以秒为单位对某运算计时:
double t = (double)getTickCount();
// 做点什么 ...
t = ((double)getTickCount() - t)/getTickFrequency();
cout << "Times passed in seconds: " << t << endl;3、四种方式扫描图像
代码在范例的基础上做了一些小修改
#include "stdafx.h"
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
#include <sstream>
using namespace std;
using namespace cv;
static void help()
{
cout
<< "\n--------------------------------------------------------------------------" << endl
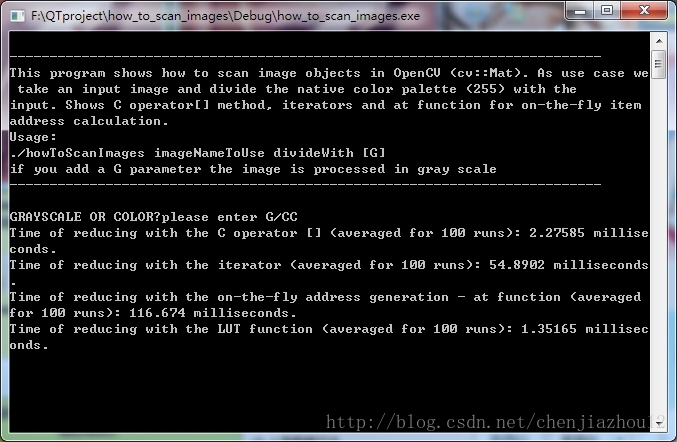
<< "This program shows how to scan image objects in OpenCV (cv::Mat). As use case"
<< " we take an input image and divide the native color palette (255) with the " << endl
<< "input. Shows C operator[] method, iterators and at function for on-the-fly item address calculation."<< endl
<< "Usage:" << endl
<< "./howToScanImages imageNameToUse divideWith [G]" << endl
<< "if you add a G parameter the image is processed in gray scale" << endl
<< "--------------------------------------------------------------------------" << endl
<< endl;
}
Mat& ScanImageAndReduceC(Mat& I, const uchar* table);//通过高效的C风格运算符[](指针)
Mat& ScanImageAndReduceIterator(Mat& I, const uchar* table);//通过安全的迭代法
Mat& ScanImageAndReduceRandomAccess(Mat& I, const uchar * table);//通过相关返回值的On-the-fly地址计算
int main( int argc, char* argv[])
{
help();
namedWindow("The original picture",1);//命名显示原图像窗口
namedWindow("The change picture", 1);//命名显示改变图像窗口
//选择显示彩色or灰色
char ch=NULL;
printf("GRAYSCALE OR COLOR?please enter G/C");
scanf("%c",&ch);
Mat I, J;
if( ch== 'G' )
//读取灰色图片
I = imread("F:\\QTproject\\how_to_scan_images\\Lena.jpg", CV_LOAD_IMAGE_GRAYSCALE);
else
//读取彩色图片
I = imread("F:\\QTproject\\how_to_scan_images\\Lena.jpg", CV_LOAD_IMAGE_COLOR);
if (!I.data)
{
cout << "The image could not be loaded." << endl;
return -1;
}
int divideWith = 0;
// 把输入的字符串转为整数
stringstream s;
s << "50";
s >> divideWith;
if (!s || !divideWith)
{
cout << "Invalid number entered for dividing. " << endl;
return -1;
}
//根据颜色空间缩减,建立查找表
uchar table[256];
for (int i = 0; i < 256; ++i)
table[i] = (uchar)(divideWith * (i/divideWith));
//执行次数为100次
const int times = 100;
double t;
t = (double)getTickCount();
for (int i = 0; i < times; ++i)
{
cv::Mat clone_i = I.clone();
J = ScanImageAndReduceC(clone_i, table);
}
//计算100次的平均时间
t = 1000*((double)getTickCount() - t)/getTickFrequency();
t /= times;
//显示原图片和改变图片
imshow("The original picture",I);
imshow("The change picture",J);
waitKey(0);
cout << "Time of reducing with the C operator [] (averaged for "
<< times << " runs): " << t << " milliseconds."<< endl;
t = (double)getTickCount();
for (int i = 0; i < times; ++i)
{
cv::Mat clone_i = I.clone();
J = ScanImageAndReduceIterator(clone_i, table);
}
t = 1000*((double)getTickCount() - t)/getTickFrequency();
t /= times;
cout << "Time of reducing with the iterator (averaged for "
<< times << " runs): " << t << " milliseconds."<< endl;
t = (double)getTickCount();
for (int i = 0; i < times; ++i)
{
cv::Mat clone_i = I.clone();
ScanImageAndReduceRandomAccess(clone_i, table);
}
t = 1000*((double)getTickCount() - t)/getTickFrequency();
t /= times;
cout << "Time of reducing with the on-the-fly address generation - at function (averaged for "
<< times << " runs): " << t << " milliseconds."<< endl;
//通过核心函数LUT
Mat lookUpTable(1, 256, CV_8U);
uchar* p = lookUpTable.data;
for( int i = 0; i < 256; ++i)
p[i] = table[i];
t = (double)getTickCount();
for (int i = 0; i < times; ++i)
LUT(I, lookUpTable, J);
t = 1000*((double)getTickCount() - t)/getTickFrequency();
t /= times;
cout << "Time of reducing with the LUT function (averaged for "
<< times << " runs): " << t << " milliseconds."<< endl;
char ch1=NULL;
scanf("%c",&ch1);
while (ch1!='c')
{
ch1=getchar();
}
return 0;
}
Mat& ScanImageAndReduceC(Mat& I, const uchar* const table)
{
// accept only char type matrices
CV_Assert(I.depth() != sizeof(uchar));
int channels = I.channels();//得到通道数
int nRows = I.rows;//获得行数
int nCols = I.cols * channels;//行数*通道数=一行中有多少个数值
//如果图像矩阵存储空间是连续的
if (I.isContinuous())
{
nCols *= nRows;//得到存储矩阵的大小
nRows = 1;
}
int i,j;
uchar* p;
for( i = 0; i < nRows; ++i)
{
p = I.ptr<uchar>(i);//得到存储矩阵的起始地址
for ( j = 0; j < nCols; ++j)
{
p[j] = table[p[j]];//赋值
}
}
//整个过程起始是将矩阵看出是一个一行nCols列的矩阵,由p指针指向矩阵,再进行赋值。
return I;
}
Mat& ScanImageAndReduceIterator(Mat& I, const uchar* const table)
{
// accept only char type matrices
CV_Assert(I.depth() != sizeof(uchar));
const int channels = I.channels();
switch(channels)
{
case 1:
{
MatIterator_<uchar> it, end;//定义uchar的迭代器
for( it = I.begin<uchar>(), end = I.end<uchar>(); it != end; ++it)
*it = table[*it];
break;
}
case 3:
{
MatIterator_<Vec3b> it, end;//定义Vec3b的迭代器
for( it = I.begin<Vec3b>(), end = I.end<Vec3b>(); it != end; ++it)
{
(*it)[0] = table[(*it)[0]];
(*it)[1] = table[(*it)[1]];
(*it)[2] = table[(*it)[2]];
}
}
}
return I;
}
Mat& ScanImageAndReduceRandomAccess(Mat& I, const uchar* const table)
{
// accept only char type matrices
CV_Assert(I.depth() != sizeof(uchar));
const int channels = I.channels();
switch(channels)
{
case 1:
{
for( int i = 0; i < I.rows; ++i)
for( int j = 0; j < I.cols; ++j )
I.at<uchar>(i,j) = table[I.at<uchar>(i,j)];//对行列循环对每个数据点进行赋值
break;
}
case 3:
{
Mat_<Vec3b> _I = I;//使用Mat_类进行运算,较为方便
for( int i = 0; i < I.rows; ++i)
for( int j = 0; j < I.cols; ++j )
{
_I(i,j)[0] = table[_I(i,j)[0]];
_I(i,j)[1] = table[_I(i,j)[1]];
_I(i,j)[2] = table[_I(i,j)[2]];
}
I = _I;
break;
}
}
return I;
}
4、运行图片结果为:

图1、原图片 图2、颜色缩减图片

时间对比如下:
5、结论:
| Efficient Way | 2.27585 milliseconds |
| Iterator | 54.8902 milliseconds |
| On-The-Fly RA | 116.674 milliseconds |
| LUT function | 1.35165 milliseconds |
②从安全性角度来考虑,迭代法是更佳的选择,但是效率不是很明显
③On-The-Fly RA方法扫描全图是一个最浪费资源的方法
④Efficient Way方法是比较有效的方法,使用起来也方便,推荐使用
下面网址是其他博客收集或者自己编写的代码,大家可以参考一下
【OpenCV】访问Mat图像中每个像素的值
【OpenCV】访问Mat中每个像素的值(新)
OpenCV学习笔记(四十二)——Mat数据操作之普通青年、文艺青年、暴力青年
6、用到的类:
Mat_类:
这个类来源于Mat类,数据结构为:
template<typename _Tp> class Mat_ : public Mat
{
public:
// ... some specific methods
// and
// no new extra fields
};
// create a 100x100 8-bit matrix
Mat M(100,100,CV_8U);
// this will be compiled fine. no any data conversion will be done.
Mat_<float>& M1 = (Mat_<float>&)M;通过vec作为参数,可以使用Mat_多通道矩阵,如:
// allocate a 320x240 color image and fill it with green (in RGB space)
Mat_<Vec3b> img(240, 320, Vec3b(0,255,0));
// now draw a diagonal white line
for(int i = 0; i < 100; i++)
img(i,i)=Vec3b(255,255,255);
// and now scramble the 2nd (red) channel of each pixel
for(int i = 0; i < img.rows; i++)
for(int j = 0; j < img.cols; j++)
img(i,j)[2] = 255;LUT函数:
数据结构:
void LUT(InputArray src, InputArray lut, OutputArray dst)lut:256个元素的查找表
dst:输出矩阵,和src有着同样的size和同样的channel,和lut有着同样的depth
功能是为目标矩阵填充查找表数据,原理是如下:


将src的数据加上d再通过查找表查找数据,最后赋值给dst。














 869
869











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









