







为了方便串口程序的调试,使用了如下两款工具软件
[1]. 串口调试助手
该软件可以通过串口收发数据。可以通过串口发送数据,也可以查看串口收到的数据。
[2]. 虚拟串口
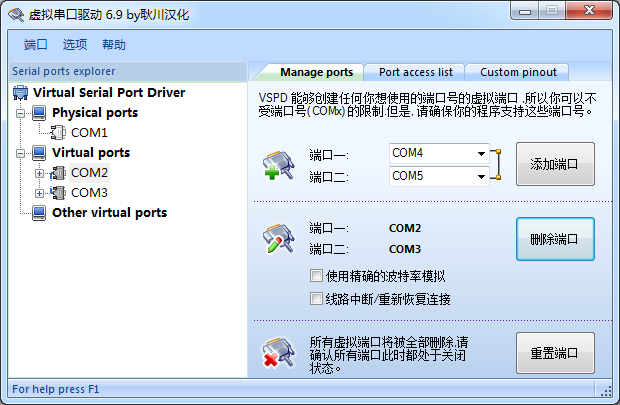
可以虚拟串口,每次虚拟出一对串口,这对串口相互连通。如图中虚拟出了串口COM2和COM3,这样通过COM2发送的数据,会由COM3接收到,反之亦然。
串口通信的基本步骤
(1) 通过CreateFile(“COMx:“,…) 打开串口
(2) 通过配置DCB结构体和SetCommState函数,设置串口的参数。
(3) 通过ReadFile()和WriteFile 读写串口
Windows 串口通信实例
封装了一个串口通信的C++类CSerial,通过CSerial类的OpenSerialPort()可以打开一个串口,串口打开后后自动新建线程读取串口数据,并通过MessageBox简单的显示出数据。通过CSerial类的SendData()方法可以向串口发送数据。
主函数中,新建了一个CSerial类对象,打开串口2,然后简单的通过一个消息框循环来控制向串口不断的发送数据。
程序的效果图如下:
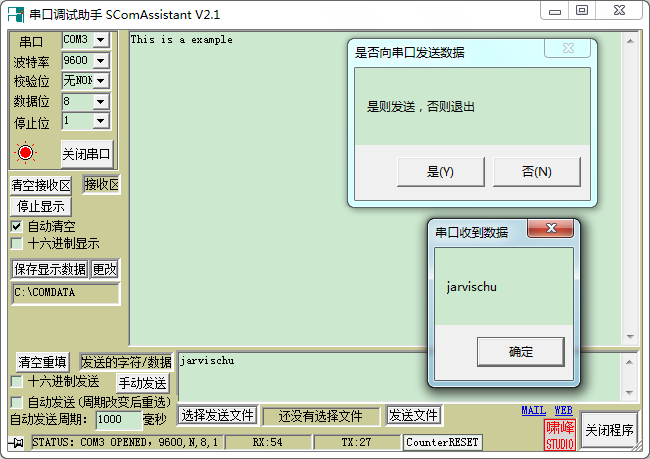
使用虚拟串口工具虚拟出串口对COM2和COM3,本实例程序读写COM2,使用串口调试助手打开COM3。
-> 在“是否向串口发送数据”消息框中,点击”是(Y)” 会向串口发送一条”This is a example” 数据。如图,在串口调试助手中收到该数据包
-> 在串口调试助手中,手动发送”jarvischu”,程序会读取到该数据并弹出消息框显示。
源码如下:
Serial.h
#pragma once
#include <windows.h>
class CSerial
{
public:
CSerial(void);
~CSerial(void);
//打开串口
BOOL OpenSerialPort(TCHAR* port, UINT baud_rate, BYTE date_bits, BYTE stop_bit, BYTE parity = NOPARITY);
//发送数据
BOOL SendData(char* data, int len);
public:
HANDLE m_hComm;
};Serial.cpp
#include"StdAfx.h"
#include"Serial.h"
#include<process.h>
typedef unsigned(__stdcall *PTHREEA_START) (void *);
CSerial::CSerial(void)
{
m_hComm = INVALID_HANDLE_VALUE;
}
CSerial::~CSerial(void)
{
if (m_hComm!= INVALID_HANDLE_VALUE) {
CloseHandle(m_hComm);
}
}
/*********************************************************************************************
* 功能 : 读串口线程回调函数
* 描述 : 收到数据后,简单的显示出来
********************************************************************************************/
DWORD WINAPI CommProc(LPVOID lpParam) {
CSerial* pSerial = (CSerial*)lpParam;
//清空串口
PurgeComm(pSerial->m_hComm, PURGE_RXCLEAR | PURGE_TXCLEAR);
char buf[512];
DWORD dwRead;
while (pSerial->m_hComm != INVALID_HANDLE_VALUE) {
BOOL bReadOK = ReadFile(pSerial->m_hComm, buf, 512, &dwRead, NULL);
if (bReadOK && (dwRead > 0)) {
buf[dwRead] = '\0';
MessageBoxA(NULL, buf, "串口收到数据", MB_OK);
}
}
return 0;
}
/*******************************************************************************************
* 功能 : 打开串口
* port : 串口号, 如_T("COM1:")
* baud_rate: 波特率
* date_bits: 数据位(有效范围4~8)
* stop_bit : 停止位
* parity : 奇偶校验。默认为无校验。NOPARITY 0; ODDPARITY 1;EVENPARITY 2;MARKPARITY 3;SPACEPARITY 4
********************************************************************************************/
BOOL CSerial::OpenSerialPort(TCHAR* port, UINT baud_rate, BYTE date_bits, BYTE stop_bit, BYTE parity)
{
//打开串口
m_hComm = CreateFile(port, GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, 0, NULL);//独占方式打开串口
TCHAR err[512];
if (m_hComm == INVALID_HANDLE_VALUE) {
_stprintf(err, _T("打开串口%s 失败,请查看该串口是否已被占用"), port);
MessageBox(NULL, err, _T("提示"), MB_OK);
return FALSE;
}
//MessageBox(NULL,_T("打开成功"),_T("提示"),MB_OK);
//获取串口默认配置
DCB dcb;
if (!GetCommState(m_hComm, &dcb)) {
MessageBox(NULL, _T("获取串口当前属性参数失败"), _T("提示"), MB_OK);
}
//配置串口参数
dcb.BaudRate = baud_rate; //波特率
dcb.fBinary = TRUE; //二进制模式。必须为TRUE
dcb.ByteSize = date_bits; //数据位。范围4-8
dcb.StopBits = ONESTOPBIT; //停止位
if (parity == NOPARITY) {
dcb.fParity = FALSE; //奇偶校验。无奇偶校验
dcb.Parity = parity; //校验模式。无奇偶校验
}
else {
dcb.fParity = TRUE; //奇偶校验。
dcb.Parity = parity; //校验模式。无奇偶校验
}
dcb.fOutxCtsFlow = FALSE; //CTS线上的硬件握手
dcb.fOutxDsrFlow = FALSE; //DST线上的硬件握手
dcb.fDtrControl = DTR_CONTROL_ENABLE;//DTR控制
dcb.fDsrSensitivity = FALSE;
dcb.fTXContinueOnXoff = FALSE;//
dcb.fOutX = FALSE; //是否使用XON/XOFF协议
dcb.fInX = FALSE; //是否使用XON/XOFF协议
dcb.fErrorChar = FALSE; //是否使用发送错误协议
dcb.fNull = FALSE; //停用null stripping
dcb.fRtsControl = RTS_CONTROL_ENABLE;//
dcb.fAbortOnError = FALSE; //串口发送错误,并不终止串口读写
//设置串口参数
if(!SetCommState(m_hComm, &dcb)) {
MessageBox(NULL, _T("设置串口参数失败"), _T("提示"), MB_OK);
return FALSE;
}
//设置串口事件
SetCommMask(m_hComm, EV_RXCHAR);//在缓存中有字符时产生事件
SetupComm(m_hComm, 16384, 16384);
//设置串口读写时间
COMMTIMEOUTS CommTimeOuts;
GetCommTimeouts(m_hComm, &CommTimeOuts);
CommTimeOuts.ReadIntervalTimeout = MAXDWORD;
CommTimeOuts.ReadTotalTimeoutMultiplier = 0;
CommTimeOuts.ReadTotalTimeoutConstant = 0;
CommTimeOuts.WriteTotalTimeoutMultiplier = 10;
CommTimeOuts.WriteTotalTimeoutConstant = 1000;
if (!SetCommTimeouts(m_hComm, &CommTimeOuts)) {
MessageBox(NULL, _T("设置串口时间失败"), _T("提示"), MB_OK);
return FALSE;
}
//创建线程,读取数据
HANDLE hReadCommThread = (HANDLE)_beginthreadex(NULL, 0, (PTHREEA_START)CommProc, (LPVOID) this, 0, NULL);
return TRUE;
}
/********************************************************************************************
* 功能 : 通过串口发送一条数据
********************************************************************************************/
BOOL CSerial::SendData(char* data, int len) {
if (m_hComm == INVALID_HANDLE_VALUE) {
MessageBox(NULL, _T("串口未打开"), _T("提示"), MB_OK);
return FALSE;
}
//清空串口
PurgeComm(m_hComm, PURGE_RXCLEAR | PURGE_TXCLEAR);
//写串口
DWORD dwWrite = 0;
DWORD dwRet = WriteFile(m_hComm, data, len, &dwWrite, NULL);
//清空串口
PurgeComm(m_hComm, PURGE_RXCLEAR | PURGE_TXCLEAR);
if (!dwRet) {
MessageBox(NULL, _T("发送数据失败"), _T("提示"), MB_OK);
return FALSE;
}
return TRUE;
}主程序 ManipulateCom.cpp
#include <windows.h>
#include "Serial.h"
#include <string.h>
int main(int argc, _TCHAR* argv[])
{
CSerial serial;
serial.OpenSerialPort(_T("COM2:"),9600,8,1); //打开串口后,自动接收数据
//向串口发送数据
char* data = "This is a example\n";
int ret = 1;
while(ret != IDNO ){
serial.SendData(data,strlen(data));
ret = MessageBox(NULL,_T(""),_T("是否向串口发送数据"),MB_YESNO); //YES继续发送一条数据,NO不发送,退出
}
return 0;
}















 1514
1514

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









