







在Opengl中glEnable函数的功能是:用于启用各种功能,其功能由参数决定。所以该函数
在实现各种功能中是十分重要的。
其函数原型为:void glEnable(GLenum cap);其cap就是一个参数值,每个参数值有着不一样的功能。
与其相对应的是glDisable(GLenum cap);函数,就是关闭各种功能。
glDepthFunc
功能:指定用于深度缓冲比较值。
参数说明:func指定深度比较函数,GL_NEVER,GL_LESS,GL_EQUAL,GL_LEQUAL,GL_GREATER,
GL_NOTE_QUAL,GL_GEQUAL,GL_ALWAYS,缺省值GL_LESS,
GL_NEVER,不通过(输入的深度值不取代参考值)
GL_LESS,如果输入的深度值小于参考值,则通过
GL_EQUAL,如果输入的深度值等于参考值,则通过
GL_LEQUAL,如果输入的深度值小于或等于参考值,则通过
GL_GREATER,如果输入的深度值大于参考值,则通过
GL_NOTE_QUAL,如果输入的深度值不等于参考值,则通过
GL_GEQUAL,如果输入的深度值大于或等于参考值,则通过
GL_ALWAYS,总是通过(输入的深度值取代参考值)
opengl里面的深度缓存
在现实生活中,一个实心物体挡在另外一个实心物体的前面, 后面的那个物体有部分会被遮盖掉
那么opengl里面如何模拟这个情况呢? 每个物体的每个像素都有一个深度缓存的值(在0到1之间,
可以想象成是z轴的距离)glDepthFunc启用了GL_LESS(现实生活中的前景), 那么当前个物体
挡住后个物体时, 由于前个物体深度值小(越靠近人的), 所以它就被画了出来, 后面的物体
被挡住的像素就被忽略掉了。(当然你如果启用了GL_GREATER, 那么情况就反过来了)这个时
候再来说glClearDepth, 它给深度缓冲指定了一个初始值,缓冲中的每个像素的深度值都是这个,
比如1,这个时候你往里面画一个物体, 由于物体的每个像素的深度值都小于等于1, 所以整个
物体都被显示了出来。 如果初始值指定为0, 物体的每个像素的深度值都大于等于0, 所以整个
物体都不可见。 如果初始值指定为0.5, 那么物体就只有深度小于0.5的那部分才是可见的
glEnable函数的用法:
void myInit(void)
{
/*设置背景色*/
glClearColor(1.0,1.0,1.0,1.0);
glEnable(GL_DEPTH_TEST);
glDepthFunc(GL_LEQUAL);
。。。
}
但是不能放在glBegin和glEnd两个函数的中间。
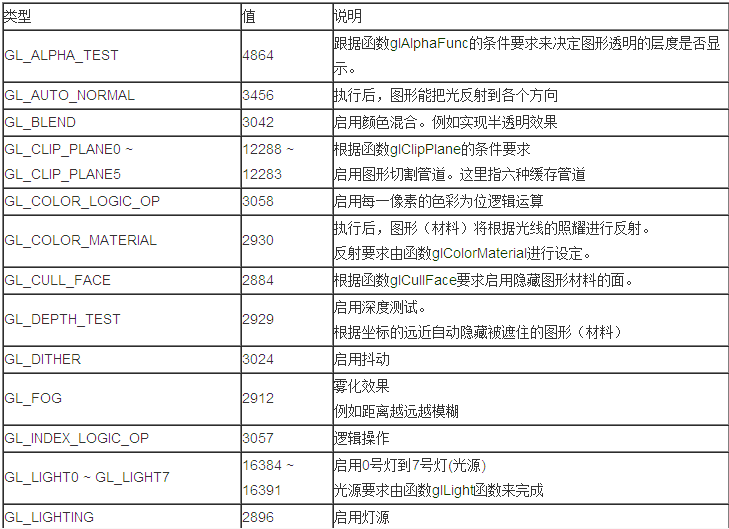
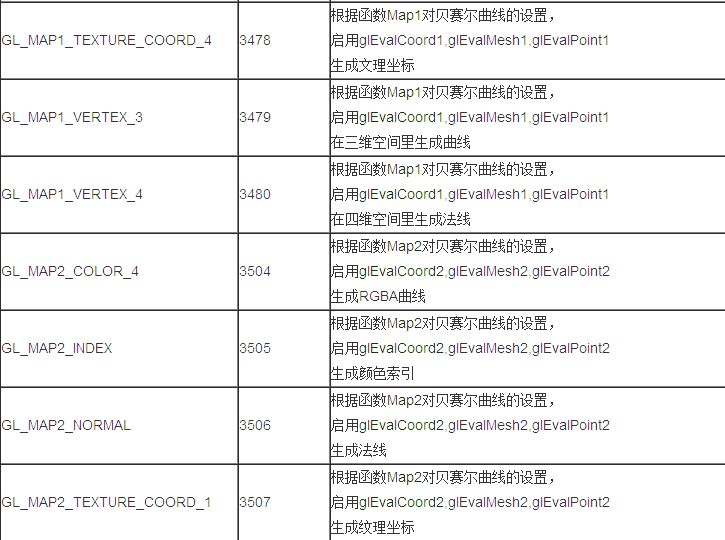
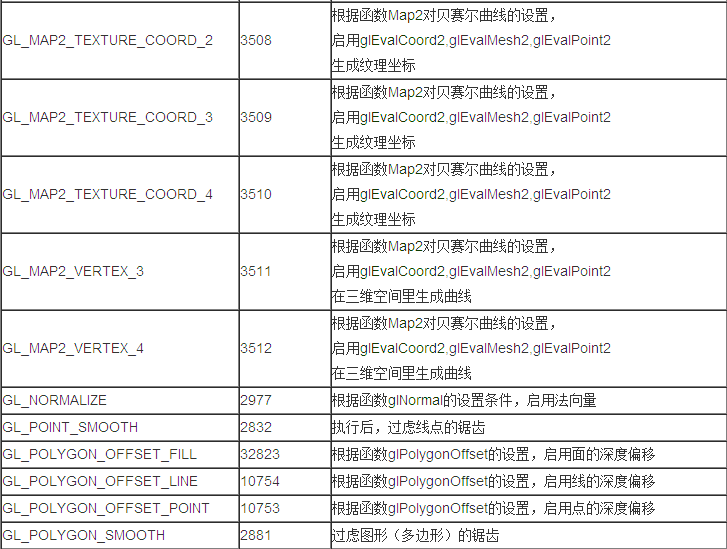
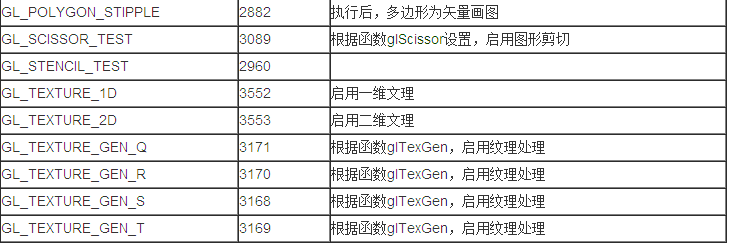
参数cap的取值为:















 6563
6563











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









