







在动态规划问题详解1,2中,我们只是拿了2个例子说明了一下什么是动态规划,及解题的思路。并没有形成一套完整的理论。这篇文章,我们将讨论如何用数学模型给动态规划问题建模。
图一
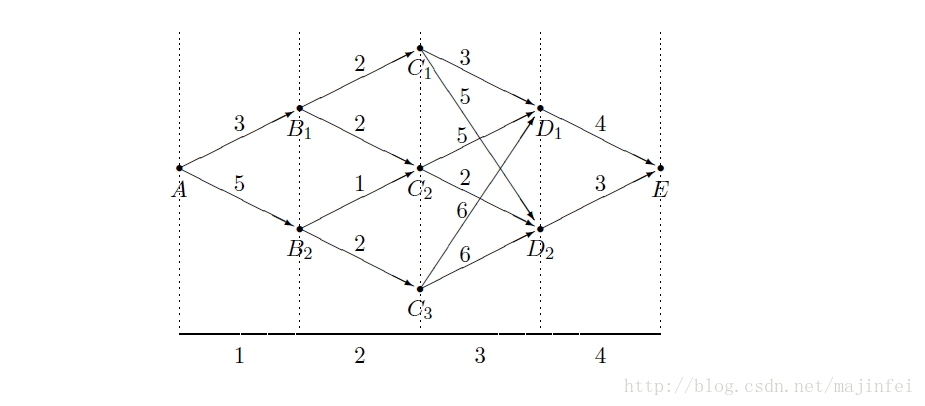
如图一所示,找出从A--->E 点的最短路径。
阶段变量
我们把整个过程分成4个阶段,A->B1(B2) , B1(B2)-->C1(C2,C3) , C1(C2,C3)->D1(D2), D1(D2)->E.整个问题,可以看成是4个阶段的决策问题,描述阶段次序的变量,称为阶段变量。用k来表示。
状态
一个阶段在开始时所面临的状况,称为状态,一个状态,既是起点,又是终点。每个阶段的所有的状态,构成了状态集合。如第一阶段的状态的集合为{A},第三阶段的状态的集合为{C1,C2,C3,C4}.描述过程状态的变量,称为状态变量。一般用x_k来表示第k个阶段的某个状态.
决策
一个阶段的状态给定以后,从一个状态到另一个状态的选择,我们称之为决策。用来描述这种选择的变量称为决策变量,一般用u_k(x_k)表示第k个阶段,状态为x_k的决策变量。决策变量,允许选择的变量,称为允许决策变量用U_k表示。如果用X_3表示第三个阶段的状态的集合,则X_3={C1,C2,C3} .如果从C2出发,则U_2(c2)={D1,D2}如果我们选择了D2,那么u_3(c2)=D2
策略
由各个阶段的决策,u_k(x_k) k={1,2,3,....n}组成的决策序列,称为一个策略,一般用P表示一个策略。P_n={u_1(x_1),u_2(x_2)....u_n(x_n)}
在实际的问题中,可供选择的策略是有限的,如{A,B2,C3,D2,E}. 是一种策略。图1中所示的,允许策略集合一共包含2*2*2*1=8个策略。允许策略集合中达到最优效果和策略称为最优策略。
状态转移方程
所谓状态转移就是过程由于一个状态转变到另一个状态的变化。显然,它既与前一状态有关,又与所选择的决策有关。显然,第k段的状态x_k和决策u_k(x_k)一经确定后,第k+1段的状态x_k+1,也就随之确定。那么这个对应关系可记作:
x_k+1=T_k(x_k,u_k(x_k))称为由状态x_k到x_k+1状态转移方程。在图1中,当x2=B1,时,u_2(x2)=C2,则有下一个状态 c2= T(B1,C2)
指标函数
为了衡量策略的优劣,我们引入了指标函数,用V_kn表示。最优指标函数胜f_k_n表示。图1 中,f_k_n表示从点xk到终点的最短路径。
基本思想
我们仍然以图1为例。我们假设在A-E的最短路径中,存在一点p,则P->E是最短的路径。有了以上的思想之后,我们就可以采用逆序求解的思想进行了。
逆序求解
如图1中,我们可以先求解第四阶段的最优解。然后再求第三阶段,第二阶段,第一阶段。
当k=4时,f_4(D1)=4
当k=3时,出发点有c1,c2,c3 .
f_3(c1)=d(C1,D1)+ f_4(D1))= 7 当C1选择D1时
f_3(c1)=d(C1,D2)+f_4(D2)=8 当C1选择D2时。
最f_3(c1)的最小值7,则第三阶段的最优解为f_3(c1)=7,其策略为u_3(c1)=D1
直到求出f1.

因为是倒序,所以k的状态由k+1的状态及策略决定。














 1840
1840











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









