






惯性传感器(inertial sensor)现在已经普遍应用在几乎各个行业,尤其是得益于已经白菜价的mems惯性传感器的推广,大到各种级别的导弹,车载导航设备,小到大家手里的手机,都有这货,一般意义上,惯性传感器最主要的是加速度传感器和陀螺仪两种,加速度传感器测量包含重力在内的矢量加速度,陀螺仪测量包含地球自转在内的旋转角速度(对应大多数应用mems级别的陀螺仪,地球自转角速度可以被忽略),惯性传感器除了单个使用以外,也可以组合多个使用,比如多个级联在一起捕捉人体动作姿态,用于影视/动漫[1-3],体育训练[4],VR/AR[1,3]等领域。除了这些主流应用,也有一些科学家把惯性传感器应用到了猫猫狗狗的身上,通过这些惯性传感器得到数据,进行一些行为姿态判断,动作模式识别等研究。
1.旺财[5]
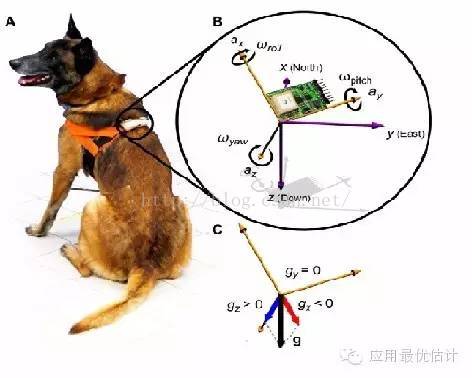
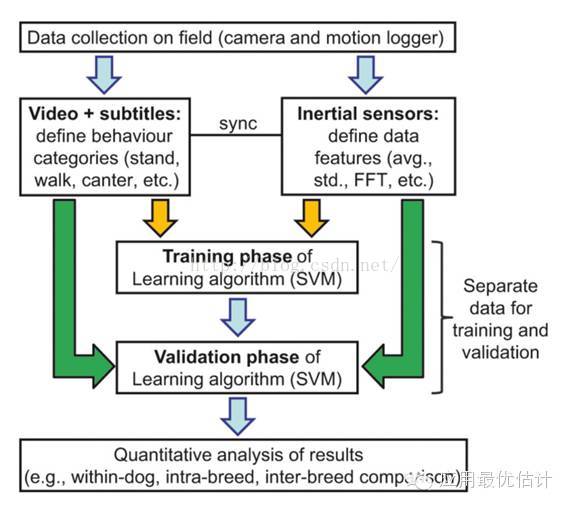
作者Gerencser, L.等人准备了24只不同的健康的“旺财”,所有的旺财都有基本的动作训练,身上都安装了个包含三轴加速度、三轴陀螺仪和GPS的模块,外加一组摄像头录制旺财的一系列(坐,躺、吃等)动作,同时记录惯性传感器对应在不同状态下的输出,采用的监督学习的SVM进行分类。
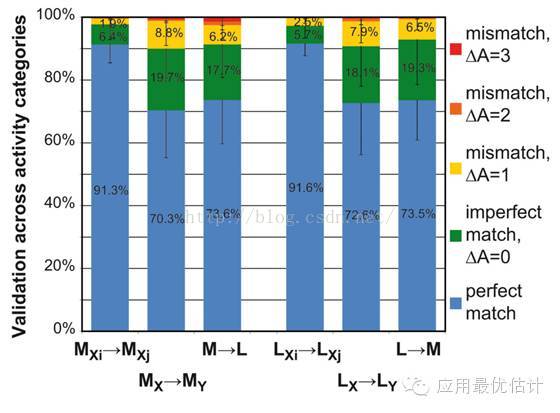
下面是作者给出的旺财的SVM验证精度
2.大黄[6]
Tim Walk等人在澳大利亚做了一个智能农场的项目,里面涉及大量农场监控相关的传感器网络技术,与本文主题相关的是在一些大黄牛脖子上放了一个GPS+三轴加速度传感器+三轴电子罗盘传感器的模块(牛脑袋运动近似准静态过程,不需要陀螺仪),用于监控牛所在农场位置以及计算牛脑袋的姿态,识别大黄牛正在那儿吃草,睡觉等等。

3.大象[7]
LeiRen和John R. Hutchinson利用惯性传感器对大象进行步态分析。
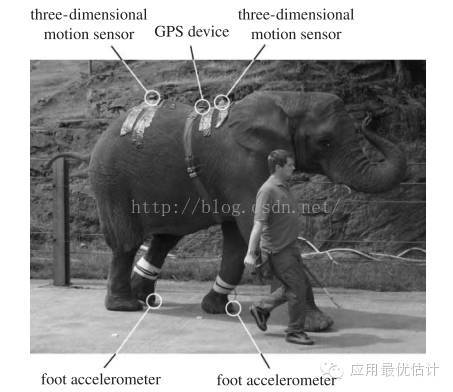
大象身上安装9-axis IMU和GPS模块,脚上有加速度传感器。
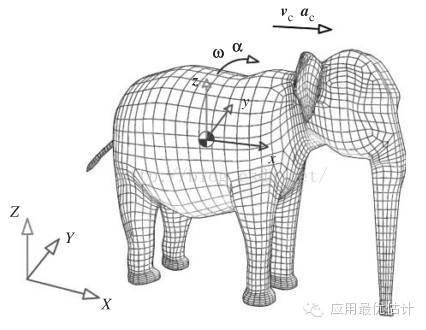
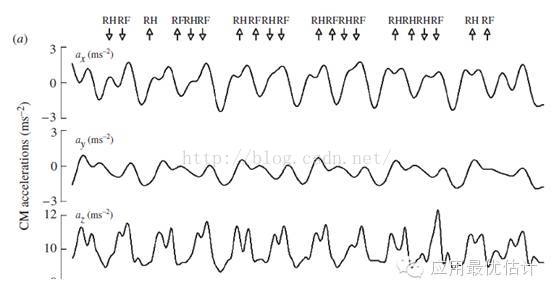
定义大象运动相关物理量了和两个坐标系,一个大象前进方向为x的大地坐标系,一个大象本地坐标系,测量到的大象质心加速度与步态关系:
4 . 海象[8]
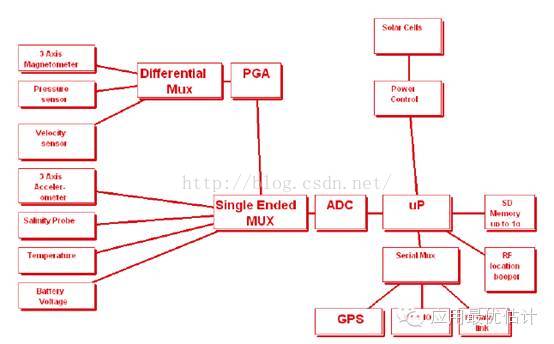
Gabriel HughElkaim等为了海洋生物行为研究,开发了一个传感器标签(sensor tag),上面有GPS、惯性传感器、深度传感器、盐度及温度传感器,所有的数据都离线保存在本地SD中,文章也提到DR算法使用了三种进行模拟仿真:开环积分,深度传感器负反馈以及kalman滤波算法,三中算法精度都很好,满足要求,但增加深度传感器噪声,kalman滤波算法鲁棒性表现最好。
传感器标签内部PCBA图:

传感器标签系统框图:
最后传感器标签安装在一只坦(wū)然(gū)表情的海象脑袋上:

5.企鹅[9,10]
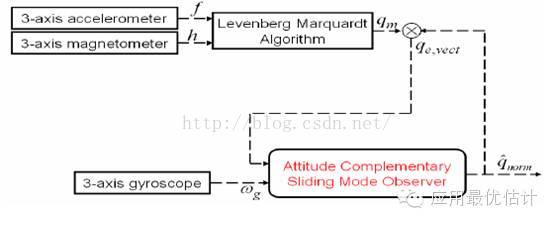
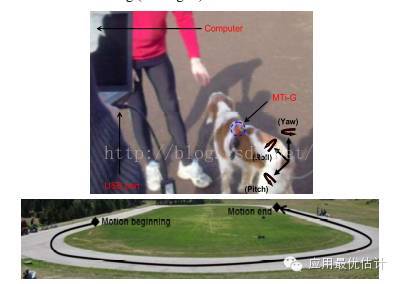
H. Fourati等人要搞海洋生物(企鹅)研究,先是使用一个狗狗验证算法,然后才对企鹅下的手,在文献[10]中,用一个9-axis的IMU和一个GPS,其中姿态算法利用一种叫互补滑动模型观测(complementary sliding mode observer)的滤波算法,算法描述框图:
验证CSMO算法的狗:
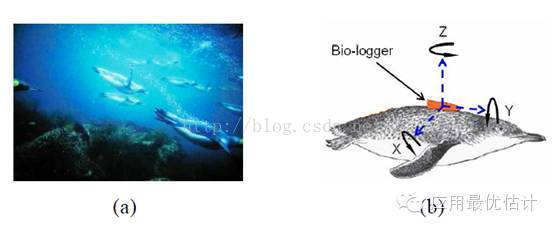
算法验证之后,作者开发了一个称为Bio-logger的传感器标签,本地SD进行离线数据保存:

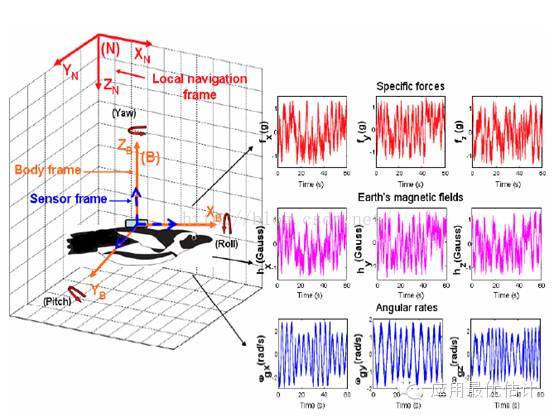
最后安装到企鹅身上并定义了测量物理量和相关的坐标系:
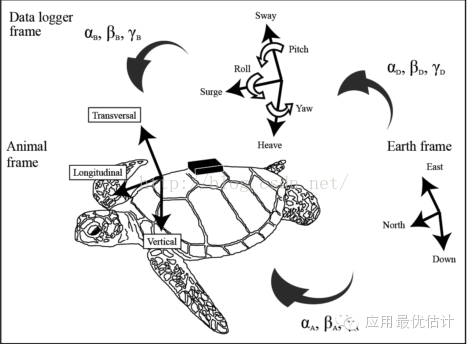
6. 海龟[11]
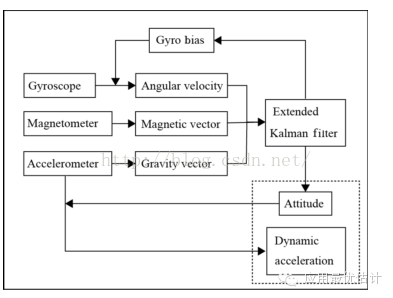
Takuji Noda等做的和前面一些应用很类似,也开发了一个datalogger(里面包含9-axis的IMU),用来对海龟的运动进行研究,姿态算法使用的EKF,算法描述框图:
海龟运动分析相关的物理量及坐标系定义:
7.海豹[12]
和前面的海象、海龟应用类似,通过GPS+9-axis IMU分析海豹在哪些区域活动,在海里消耗多少能量,要吃多少食物才能存活等。

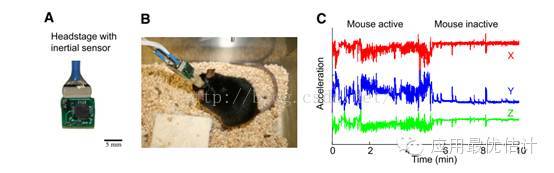
这个有点重口味,一句话描述,SubramaniamVenkatraman等把一只小白鼠开颅并神经信号取出来,线材上固定一个惯性传感器到头部,采集神经信号和惯性传感器信号来描述对比神经动作纠正信号与实际脑部动作的关系。
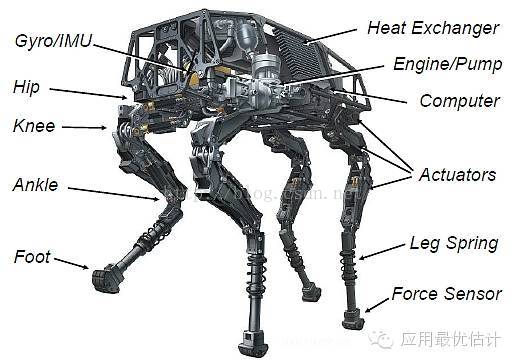
9. 大狗[14]
这个不解释了…..
参考文献
[1] NOITOM. www.noitom.com[J].
[2] XSENS. www.xsens.com [J].
[3] NEURON P. https://neuronmocap.com/[J].
[4] NOITOM. www.myswing.com[J].
[5] GERENCSER L, VASARHELYI G, NAGY M, et al. Identification ofbehaviour in freely moving dogs (Canis familiaris) using inertial sensors [J].PLoS One, 2013, 8(10): e77814.
[6] TIM W. Transforming Agriculture through Pervasive Wireless SensorNetworks [M]//PETER C, PAVAN S, LASSE K, et al. 2007: 50-7.
[7] REN L, HUTCHINSON J R. The three-dimensional locomotor dynamicsof African (Loxodonta africana) and Asian (Elephas maximus) elephants reveal asmooth gait transition at moderate speed [J]. J R Soc Interface, 2008, 5(19):195-211.
[8] ELKAIM G H. marine mammal marker(mammark) dead reckoning sensorfor in situ environmental monitoring [J].
[9] FOURATI H. Sensing technique of dynamic marine mammal's attitudeby use of low-cost inertial and magnetic sensors [J]. 2010,
[10] FOURATI H, MANAMANNI N, JEMAA A B, et al. A quaternion-basedComplementary Sliding Mode Observer for attitude estimation: Application infree-ranging animal motions [J]. 2010, 5056-61.
[11] NODA T, OKUYAMA J, KOIZUMI T, et al. Monitoring attitude anddynamic acceleration of free-moving aquatic animals using a gyroscope [J].Aquatic Biology, 2012, 16(3): 265-76.
[12] NOAA. http://www.pifsc.noaa.gov/hawaiian_monk_seal/news/instruments_attached_to_seals_to_understand_their_foraging_in_the_main_hawaiian_islands.php[J]. 2014,
[13] VENKATRAMAN S, JIN X, COSTA R M, et al. Investigating neuralcorrelates of behavior in freely behaving rodents using inertial sensors [J]. JNeurophysiol, 2010, 104(1): 569-75.
[14] EDN. BigDog robot: a sensor-based enhancement of human capabilities(http://www.edn.com/Home/PrintView?contentItemId=4414219)[J]. 2013,
欢迎关注公众号获取更多前言技术解读。















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









