




 本文详细介绍STM32F4 ADC的硬件设计,包括ADC的通道配置、库函数使用,如ADC初始化、转换、中断及平均值计算。通过实例讲解了PB0和PC4通道的配置,并演示了如何测量电池电压和电位器值。
本文详细介绍STM32F4 ADC的硬件设计,包括ADC的通道配置、库函数使用,如ADC初始化、转换、中断及平均值计算。通过实例讲解了PB0和PC4通道的配置,并演示了如何测量电池电压和电位器值。
ADC ,即 Analog-to-Digital Converter 的缩写。
指模/数转换器或者模拟/数字转换器。是指将连续变量的模拟信号转换为离散的数字信号的器件。
典型的模拟数字转换器将模拟信号转换为表示一定比例电压值的数字信号。
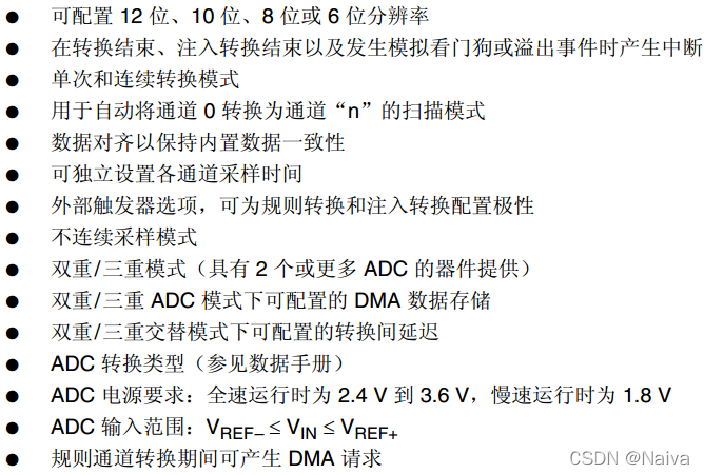
STM32F4x ADC特点:
STM32F40x大容量芯片带3个ADC控制器:
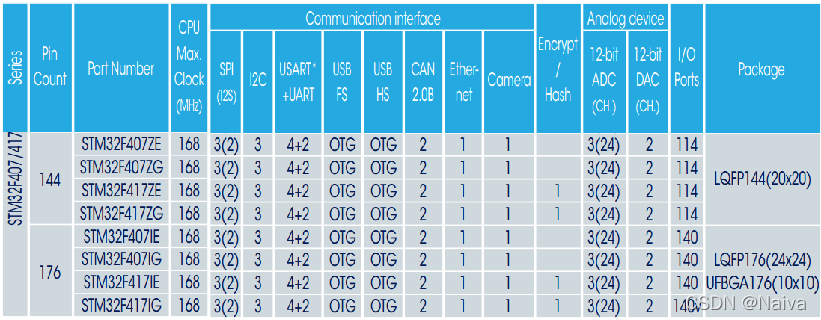
其中144脚的芯片因为带PF脚,所以多8个通道,为24个外部通道。小于144脚芯片只有16个外部通道。
STM32F40x系列ADC外部通道和引脚对应关系:

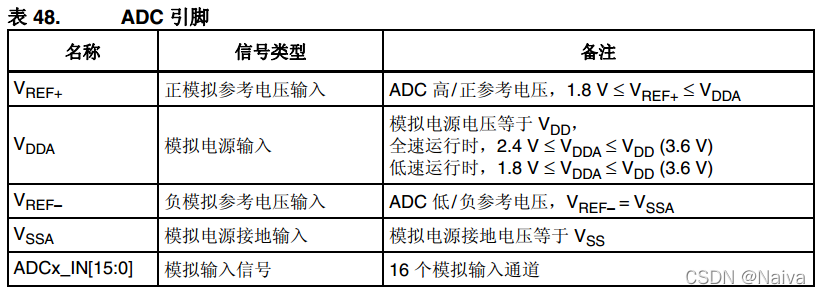
ADC引脚:
ADC框图:
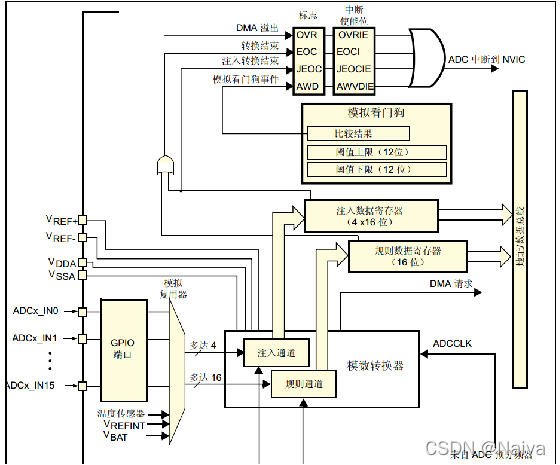
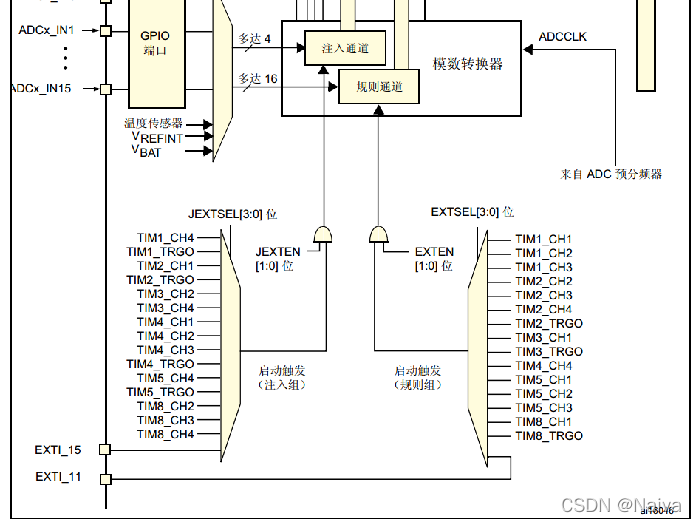
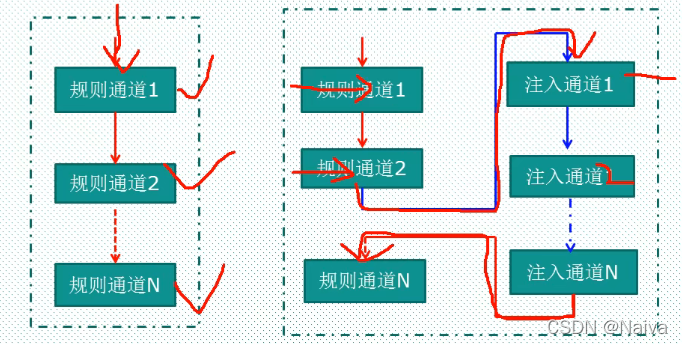
STM32通道组
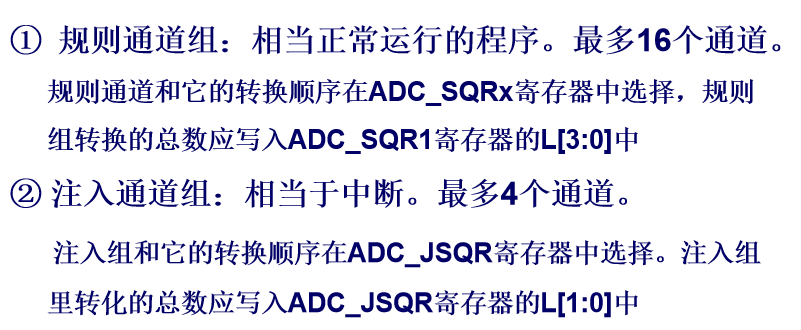
注入通道相当于中断。规则通道和注入通道都可以在寄存器当中配置。
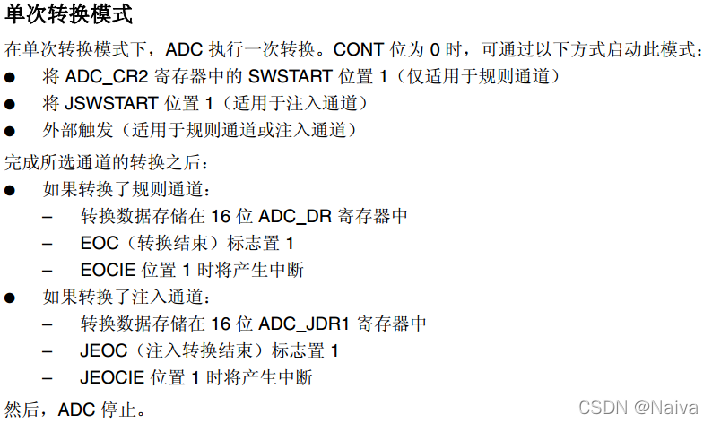
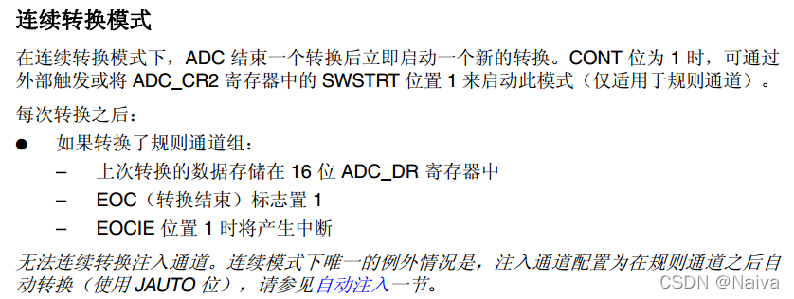
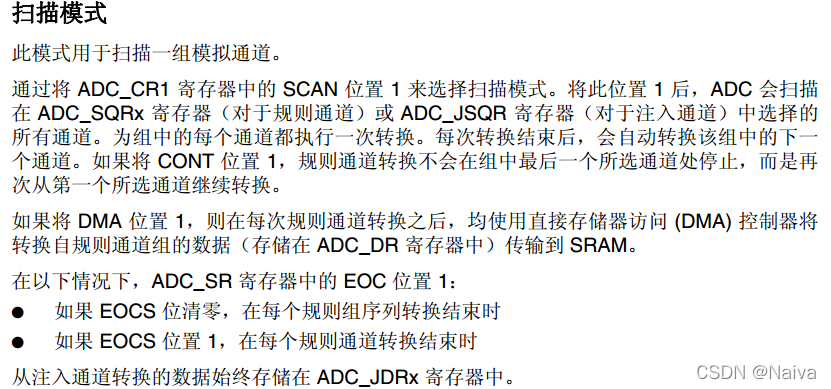
STM32F4的ADC的各通道可以单次,连续,扫描或者间断模式执行。
单次转换 VS 连续转换:
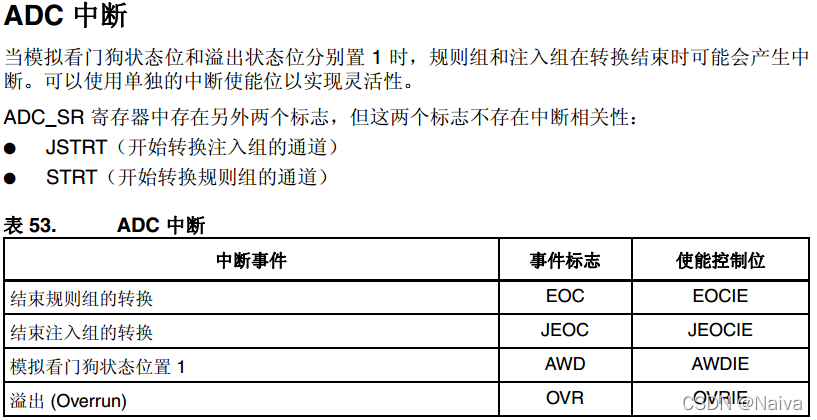
ADC中断:
ADC 常用的库函数
- ADC通用初始化函数
void ADC_CommonInit (ADC_CommonInitTypeDef* ADC_CommonInitStruct);
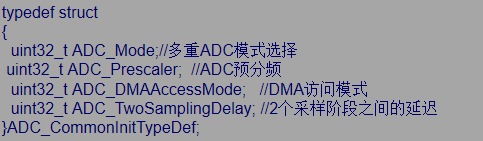
用来配置ADC_CCR寄存器的相关参数,结构体指针类型参数ADC_CommonInitTypeDef* ADC_CommonInitStruct 结构体成员变量如下:
-
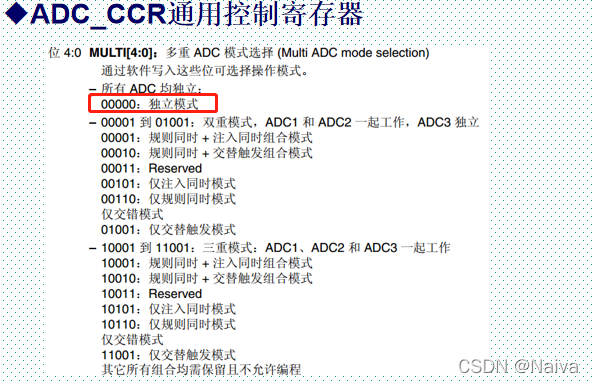
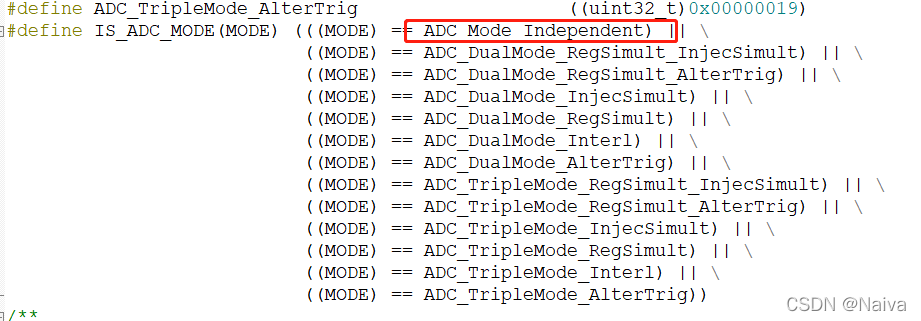
- ADC_Mode :独立模式 - ADC_Mode_Independent ,或多重模式(如下图2);
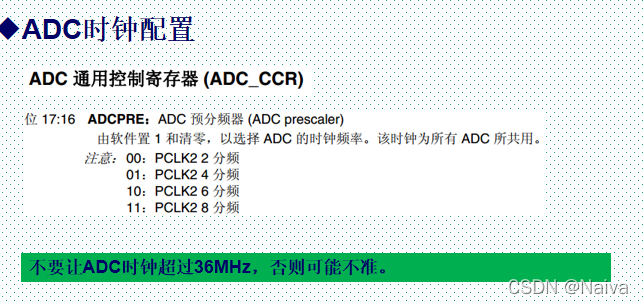
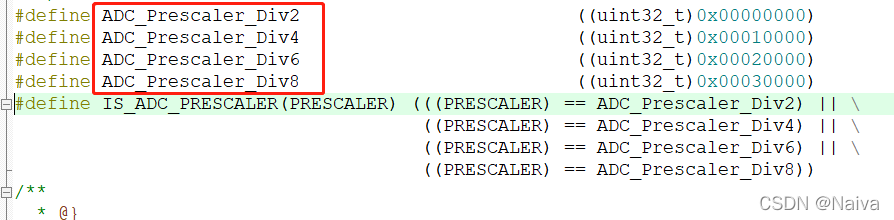
- ADC_Prescaler :预分频器 (保证 ADC1 的时钟频率不超过 36MHz)-- ADC_Prescaler_Div2~ADC_Prescaler_Div8;
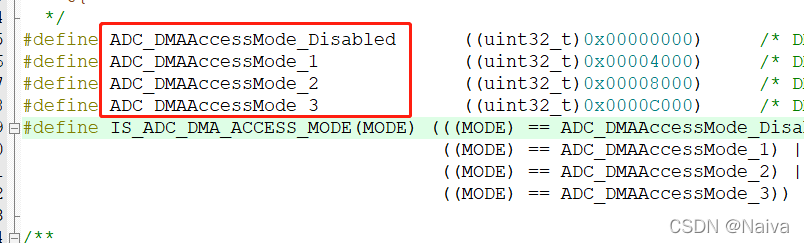
- ADC_DMAAccessMode :DMA 模式禁止或者使能相应 DMA 模式 – ADC_DMAAccessMode_Disabled或 ADC_DMAAccessMode_1~ADC_DMAAccessMode_3;
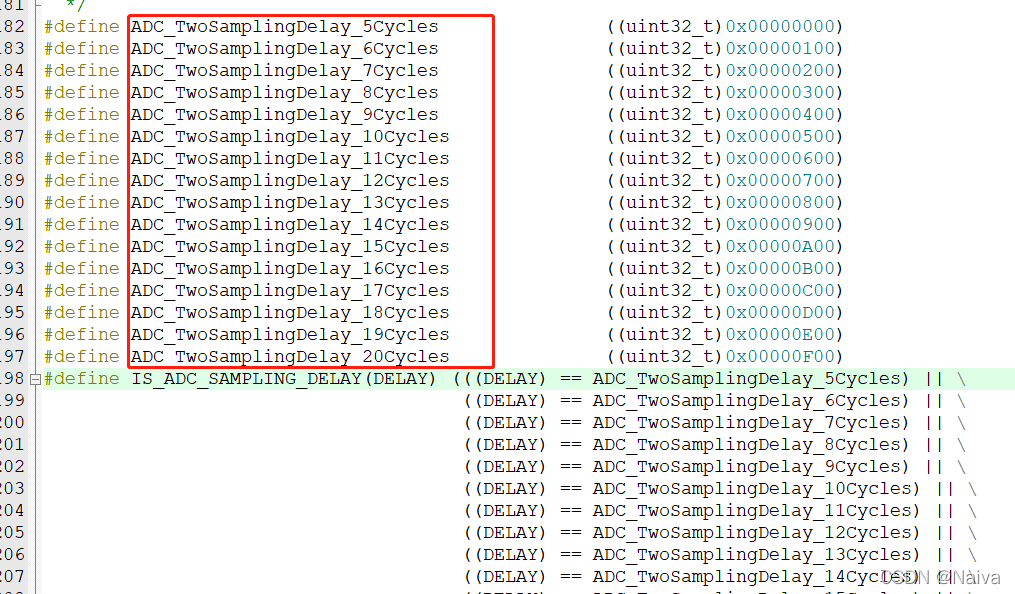
- ADC_TwoSamplingDelay :采样阶段之间的延迟周期数 - ADC_TwoSamplingDelay_5Cycles~ ADC_TwoSamplingDelay_20Cycles;
鼠标左键点击函数后右键选择 go to definition… 查看ADC_CommonInit 函数定义 :
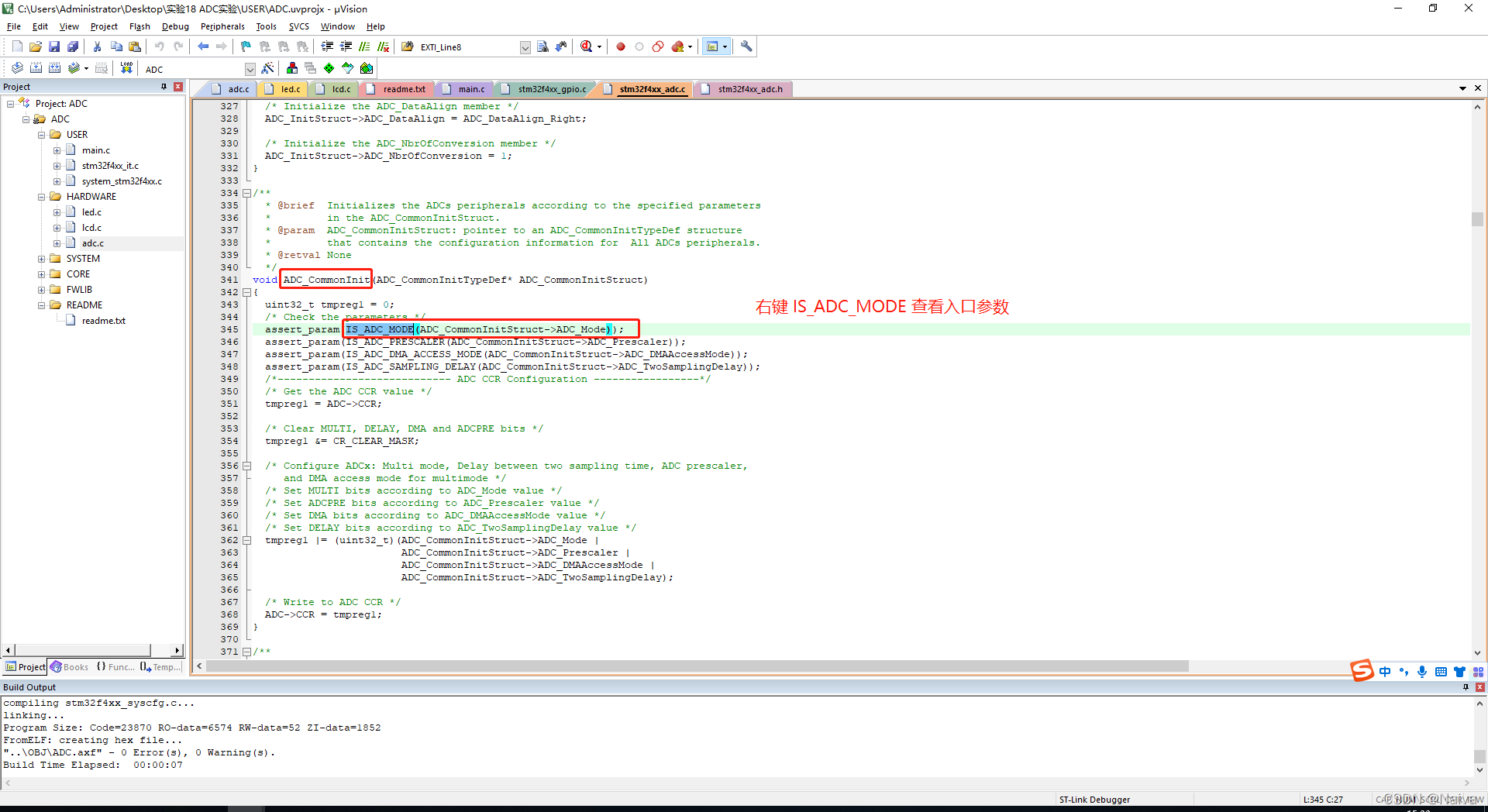
点击 IS_ADC_MODE 右键 go to definition… 查看入口参数 的有效性:
例如:
ADC_CommonInitTypeDef ADC_CommonInitStructure;// 定义一个结构体类型
ADC_CommonInitStructure.ADC_Mode = ADC_Mode_Independent;//独立模式
ADC_CommonInitStructure.ADC_TwoSamplingDelay = ADC_TwoSamplingDelay_5Cycles;//两个采样阶段之间的延迟5个时钟
ADC_CommonInitStructure.ADC_DMAAccessMode = ADC_DMAAccessMode_Disabled; //DMA失能
ADC_CommonInitStructure.ADC_Prescaler = ADC_Prescaler_Div4;//预分频4分频。ADCCLK=PCLK2/4=84/4=21Mhz,ADC时钟最好不要超过36Mhz
ADC_CommonInit(&ADC_CommonInitStructure);//初始化
-
ADC初始化函数
void ADC_Init (ADC_TypeDef* ADCx, ADC_InitTypeDef* ADC_InitStruct);- 入口参数1 ADCx :ADC1, ADC2,ADC3
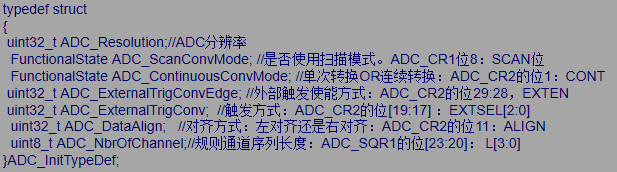
- 入口参数2 ADC_InitStruct :结构体指针如下
-
-
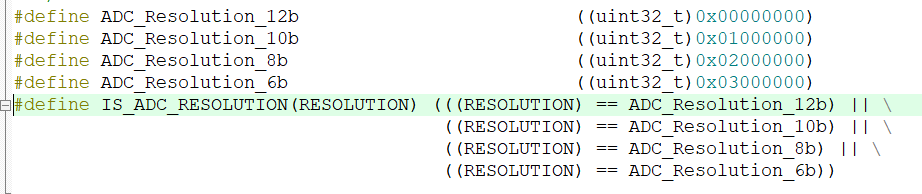
ADC_Resolution :设置ADC转换分辨率
-
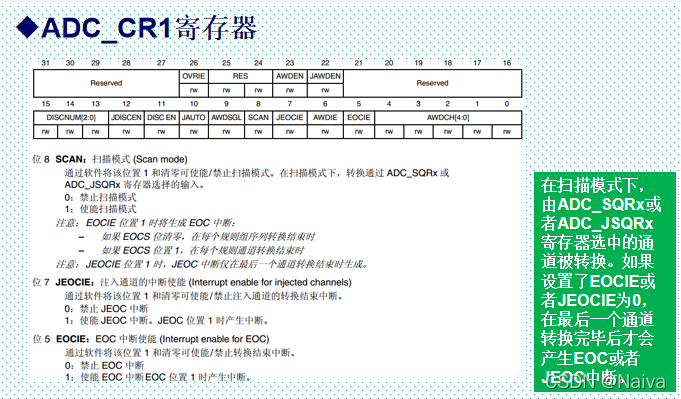
ADC_ScanConvMode :设置是否打开扫描模式

-
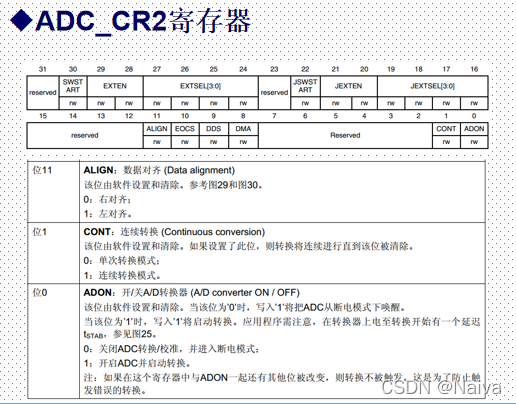
ADC_ContinuousConvMode :设置是单次转换模式还是连续转换模式

-
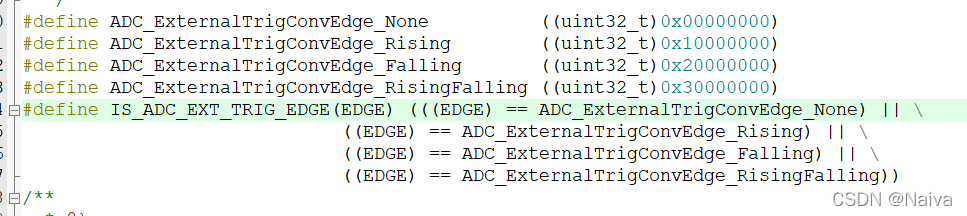
ADC_ExternalTrigConvEdge :设置外部通道的触发使能和检测方式
-
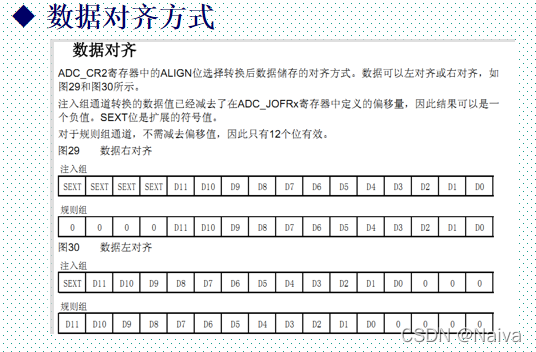
ADC_DataAlign :数 据 对 齐 方 式

-
ADC_NbrOfConversion :置规则序列的长度,这里只使用1个通道转换,设置为 1 即可。
-
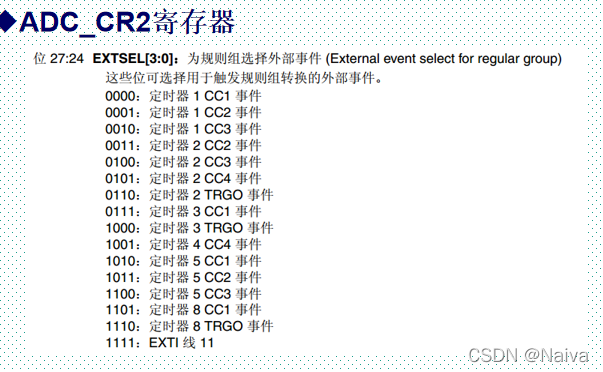
ADC_ExternalTrigConv :为规则组选择外部事件
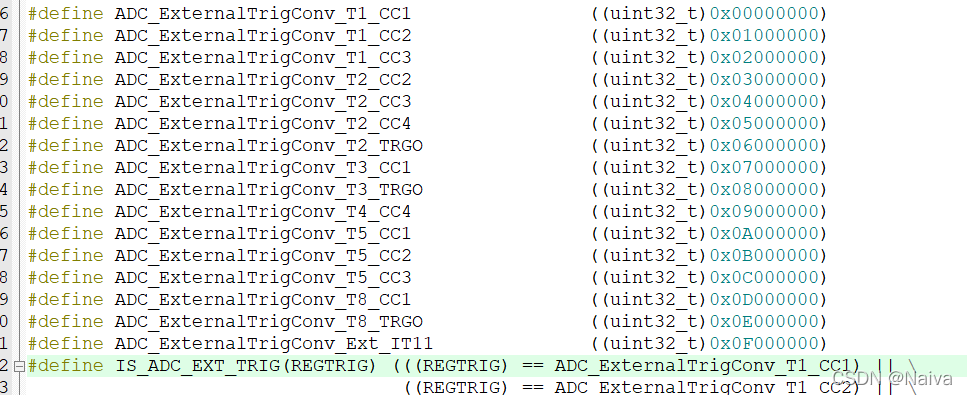
-
还有个参数 ADC_ExternalTrigConv 是用来为规则组选择外部事件。 因为前面配置的是软件触发,所以这里可以不用配置。如果选择其他触发方式方式,这里需要配置。
例如:
ADC_InitTypeDef ADC_InitStructure;//
ADC_InitStructure.ADC_Resolution = ADC_Resolution_12b;//12位模式
ADC_InitStructure.ADC_ScanConvMode = DISABLE;//非扫描模式
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;//关闭连续转换
ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None;//禁止触发检测,使用软件触发
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;//右对齐
ADC_InitStructure.ADC_NbrOfConversion = 1;//1个转换在规则序列中 也就是只转换规则序列1
ADC_Init(ADC1, &ADC_InitStructure);//ADC初始化
-
void ADC_DeInit ( ADC_TypeDef* ADCx); -
ADC使能函数
void ADC_Cmd(ADC_TypeDef* ADCx, FunctionalState NewState);
比如:
ADC_Cmd(ADC1, ENABLE);//开启AD转换器
void ADC_ITConfig ( ADC_TypeDef* ADCx, uint16_t ADC_IT, FunctionalState NewState);- ADC使能软件转换函数
void ADC_SoftwareStartConvCmd ( ADC_TypeDef* ADCx , FunctionalState NewState);
比如:
ADC_SoftwareStartConvCmd(ADC1,ENABLE);//使能ADC1的软件转换启动
- ADC 规则通道配置函数
void ADC_RegularChannelConfig ( ADC_TypeDef* ADCx, uint8_t ADC_Channel , uint8_t Rank , uint8_t ADC_SampleTime );
比如:
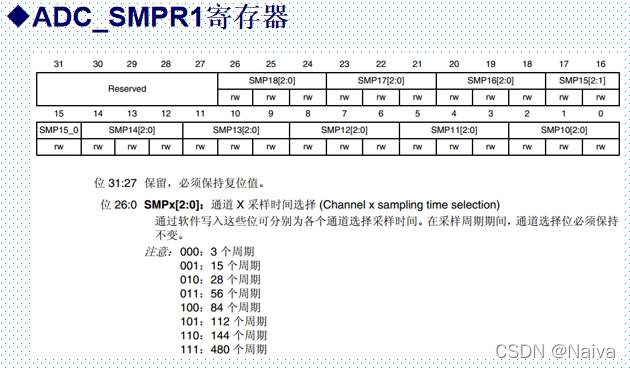
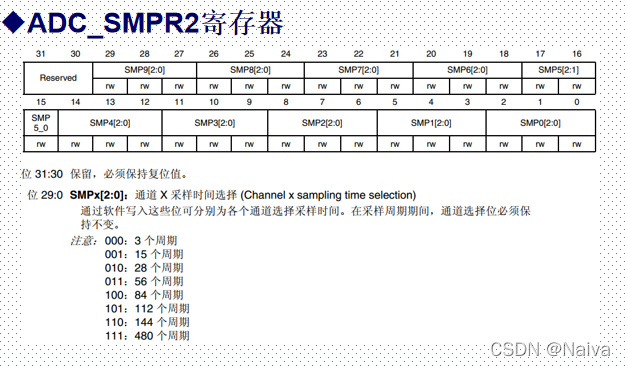
ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_480Cycles );//ADC1,ADC通道,采样时间为480周期
////ADC1,ADC通道ch=哪个通道,1指的是通道的数量,480个周期,提高采样时间可以提高精确度
- ADC 获取转换结果函数
uint16_t ADC_GetConversionValue ( ADC_TypeDef* ADCx);
比如:
ADC_GetConversionValue(ADC1); //获取ADC1规则组的转换结果
ADC 实验
硬件设计
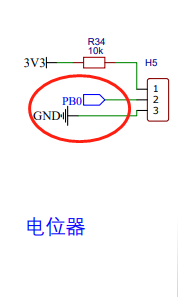
PB0 - ADC1 的通道8
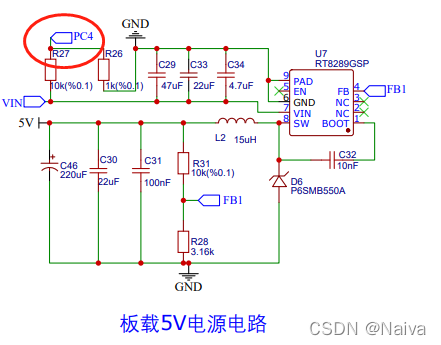
PC4 - ADC1 的通道14
#define Battery_Ch 14 //电池电压,ADC通道14
#define Potentiometer 8 //电位器,ADC通道8
实验步骤

说明:基于STM32F407
adc.h
#ifndef __ADC_H
#define __ADC_H
#include "sys.h"
#include "system.h"
#define Battery_Ch 14 //Battery voltage, ADC channel 14 //电池电压,ADC通道14
#define Potentiometer 8 //Potentiometer, ADC channel 8 //电位器,ADC通道8
void Adc_Init(void);
u16 Get_Adc(u8 ch);
float Get_battery_volt(void) ;
u16 Get_adc_Average(u8 chn, u8 times);
extern float Voltage,Voltage_Count,Voltage_All;
#endif
adc.c
#include "adc.h"
float Voltage,Voltage_Count,Voltage_All; //电池电压采样相关的变量
const float Revise=1.03;
/**************************************************************************
函数功能:ADC初始化电池电压检测
入口参数:无
返回 值:无
**************************************************************************/
void Adc_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_CommonInitTypeDef ADC_CommonInitStructure;
ADC_InitTypeDef ADC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB|RCC_AHB1Periph_GPIOC, ENABLE);//使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); //使能ADC1时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//PB0 通道8
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;//模拟输入
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;//不带上下拉
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;//PC4 通道14
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;//模拟输入
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;//不带上下拉
GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化
RCC_APB2PeriphResetCmd(RCC_APB2Periph_ADC1,ENABLE); //ADC1复位
RCC_APB2PeriphResetCmd(RCC_APB2Periph_ADC1,DISABLE); //复位结束
ADC_CommonInitStructure.ADC_Mode = ADC_Mode_Independent;//独立模式
ADC_CommonInitStructure.ADC_TwoSamplingDelay = ADC_TwoSamplingDelay_5Cycles;//两个采样阶段之间的延迟5个时钟
ADC_CommonInitStructure.ADC_DMAAccessMode = ADC_DMAAccessMode_Disabled; //DMA失能
ADC_CommonInitStructure.ADC_Prescaler = ADC_Prescaler_Div4;//预分频4分频。ADCCLK=PCLK2/4=84/4=21Mhz,ADC时钟最好不要超过36Mhz
ADC_CommonInit(&ADC_CommonInitStructure);//初始化
ADC_InitStructure.ADC_Resolution = ADC_Resolution_12b;//12位模式
ADC_InitStructure.ADC_ScanConvMode = DISABLE;//非扫描模式
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;//关闭连续转换
ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None;//禁止触发检测,使用软件触发
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;//右对齐
ADC_InitStructure.ADC_NbrOfConversion = 1;//1个转换在规则序列中 也就是只转换规则序列1
ADC_Init(ADC1, &ADC_InitStructure);//ADC初始化
ADC_Cmd(ADC1, ENABLE);//开启AD转换器
}
/**************************************************************************
函数功能:AD采样
入口参数:ADC的通道
返回 值:AD转换结果
**************************************************************************/
u16 Get_Adc(u8 ch)
{
//设置指定ADC的规则组通道,一个序列,采样时间
ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_480Cycles ); //ADC1,ADC通道,采样时间为480周期
ADC_SoftwareStartConv(ADC1); //使能指定的ADC1的软件转换启动功能
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC )); //等待转换结束
return ADC_GetConversionValue(ADC1); //返回最近一次ADC1规则组的转换结果
}
/**************************************************************************
函数功能:采集多次ADC值求平均值函数
入口参数:ADC通道和采集次数
返 回 值:AD转换结果
**************************************************************************/
u16 Get_adc_Average(u8 chn, u8 times)
{
u32 temp_val=0;
u8 t;
for(t=0;t<times;t++)
{
temp_val+=Get_Adc(chn);
delay_ms(5);
}
return temp_val/times;
}
/**************************************************************************
函数功能:读取电池电压
入口参数:无
返回 值:电池电压,单位mv
**************************************************************************/
float Get_battery_volt(void)
{
float Volt;
//电阻分压,具体根据原理图简单分析可以得到 // 将电源3.3*11.0*Revise/1.0 分成2^12=4096分
Volt=Get_Adc(Battery_Ch)*3.3*11.0*Revise/1.0/4096; // Revise = 1.03 ,2^12(采样率)=4096
return Volt;
}
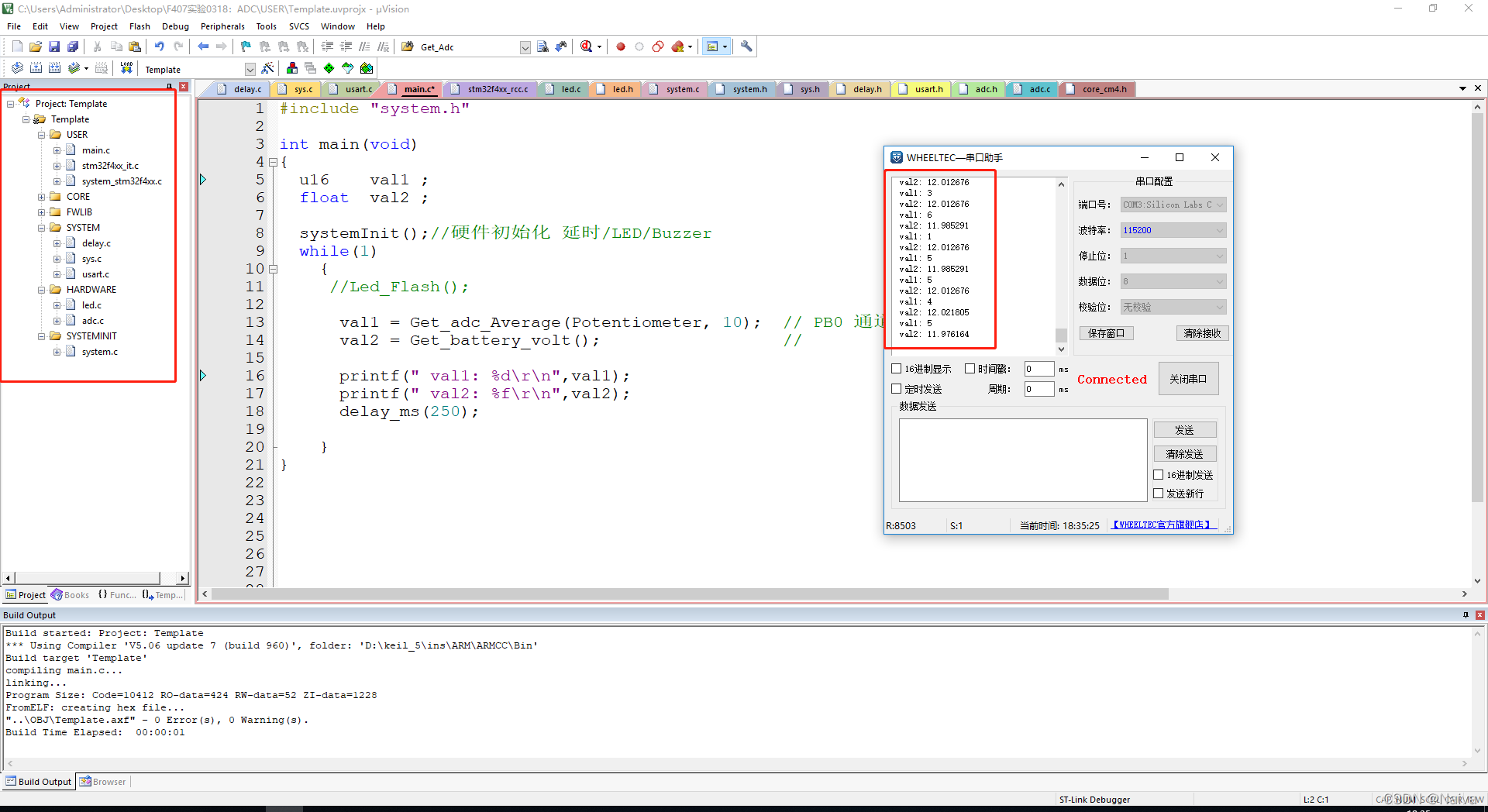
main.c
#include "system.h"
int main(void)
{
u16 val1 ;
float val2 ;
systemInit();//硬件初始化 延时/LED/Buzzer
while(1)
{
//Led_Flash();
val1 = Get_adc_Average(Potentiometer, 10); //Potentiometer PB0 通道8 采样10次取平均
val2 = Get_battery_volt(); //Battery_Ch PC4 通道14
printf(" val1: %d\r\n",val1);
printf(" val2: %f\r\n",val2);
delay_ms(250);
}
}
实验效果:
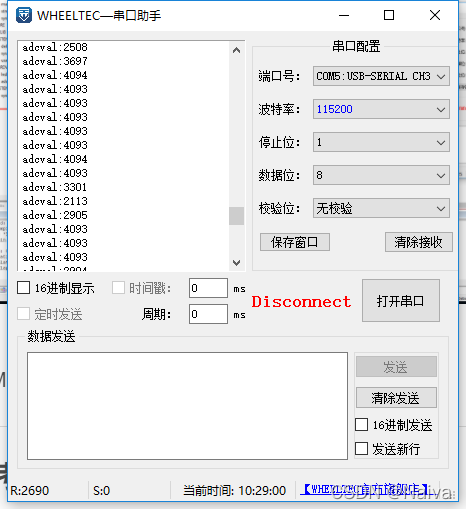
STM32F103 声音传感器ADC 实验 :
说明:详细内容见 参考资料[2]
实验效果:
参考资料
- [1] 【B站】【正点原子】手把手教你学STM32 系列视频之 STM32F4-基于探索者F407 第44~45讲
- [2] 【CSDN】@程序员小哈 :Modbus协议将声音传感器模块ADC转换的电压数据上传至上位机
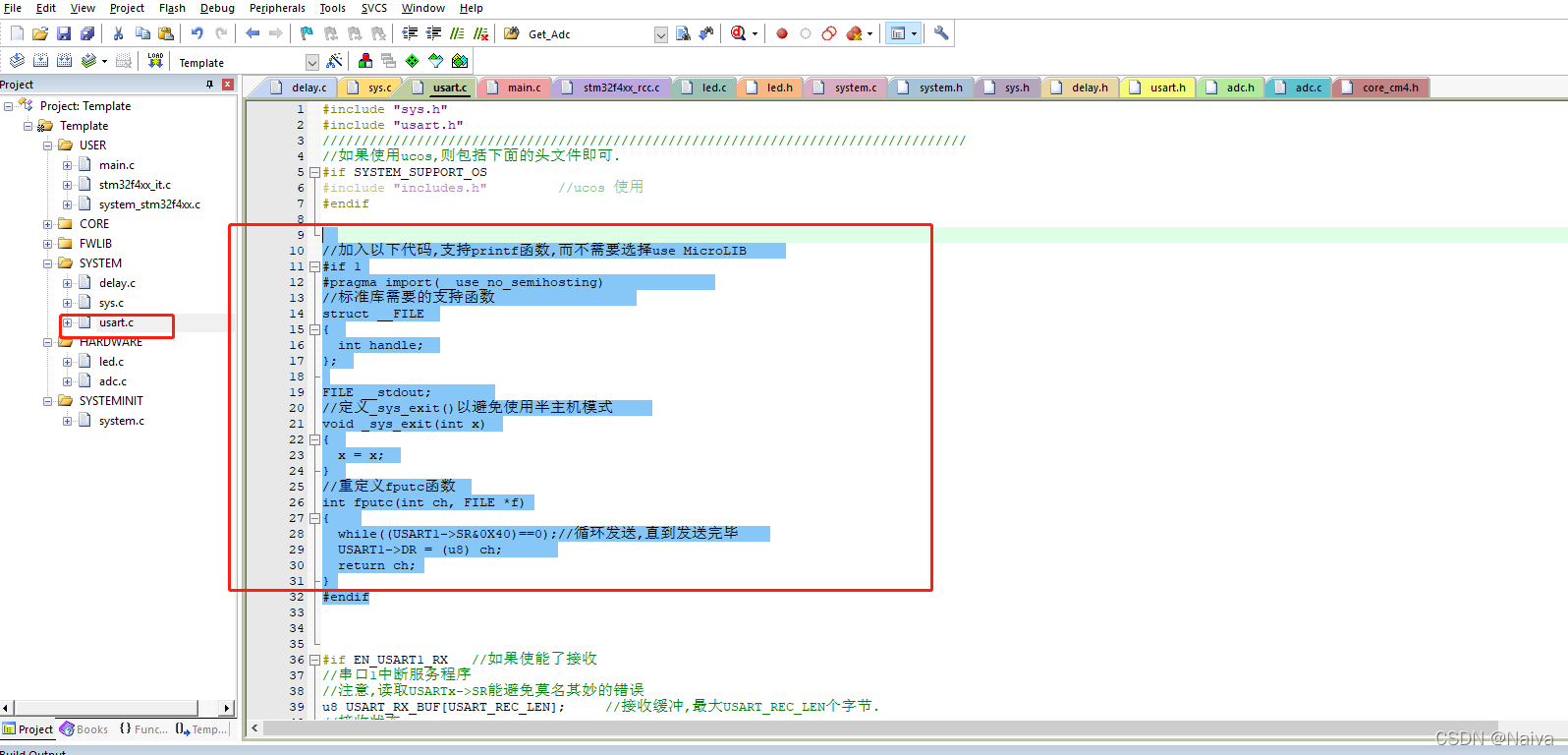
uart.c中加入以下代码,实现支持printf函数打印到串口助手
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
20240703补充记录
[江科大]-ADC单通道
源文件 adc.c
#include "stm32f10x.h" // Device header
/**
* 函 数:AD初始化
* 参 数:无
* 返 回 值:无
*/
void AD_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); //开启ADC1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*设置ADC时钟*/
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //选择时钟6分频,ADCCLK = 72MHz / 6 = 12MHz
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0引脚初始化为模拟输入
/*规则组通道配置*/
// ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_55Cycles5); //规则组序列1的位置,配置为通道0
ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 1, ADC_SampleTime_55Cycles5); //规则组序列1的位置,配置为通道1
/*ADC初始化*/
ADC_InitTypeDef ADC_InitStructure; //定义结构体变量
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //模式,选择独立模式,即单独使用ADC1
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //数据对齐,选择右对齐
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //外部触发,使用软件触发,不需要外部触发
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //连续转换,失能,每转换一次规则组序列后停止
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //扫描模式,失能,只转换规则组的序列1这一个位置
ADC_InitStructure.ADC_NbrOfChannel = 1; //通道数,为1,仅在扫描模式下,才需要指定大于1的数,在非扫描模式下,只能是1
ADC_Init(ADC1, &ADC_InitStructure); //将结构体变量交给ADC_Init,配置ADC1
/*ADC使能*/
ADC_Cmd(ADC1, ENABLE); //使能ADC1,ADC开始运行
/*ADC校准*/
ADC_ResetCalibration(ADC1); //固定流程,内部有电路会自动执行校准
while (ADC_GetResetCalibrationStatus(ADC1) == SET);
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1) == SET);
}
/**
* 函 数:获取AD转换的值
* 参 数:无
* 返 回 值:AD转换的值,范围:0~4095
*/
uint16_t AD_GetValue(void)
{
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //软件触发AD转换一次
while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); //等待EOC标志位,即等待AD转换结束
return ADC_GetConversionValue(ADC1); //读数据寄存器,得到AD转换的结果
}
源文件main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "AD.h"
uint16_t ADValue; //定义AD值变量
float Voltage; //定义电压变量
int main(void)
{
/*模块初始化*/
// OLED_Init(); //OLED初始化
AD_Init(); //AD初始化
// /*显示静态字符串*/
// OLED_ShowString(1, 1, "ADValue:");
// OLED_ShowString(2, 1, "Voltage:0.00V");
while (1)
{
ADValue = AD_GetValue(); //获取AD转换的值
Voltage = (float)ADValue / 4095 * 3.3; //将AD值线性变换到0~3.3的范围,表示电压
// OLED_ShowNum(1, 9, ADValue, 4); //显示AD值
// OLED_ShowNum(2, 9, Voltage, 1); //显示电压值的整数部分
// OLED_ShowNum(2, 11, (uint16_t)(Voltage * 100) % 100, 2); //显示电压值的小数部分
Delay_ms(100); //延时100ms,手动增加一些转换的间隔时间
}
}
数值0对应的就是0V。如果转换后的数值为X,X对应的模拟电压数值为Y,那么下列等式成立:2^12 / 3.3 = X / Y,进一步得到Y = (3.3 × X ) / 2^12
[江科大]-ADC多通道
#include "stm32f10x.h" // Device header
/**
* 函 数:AD初始化
* 参 数:无
* 返 回 值:无
*/
void AD_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); //开启ADC1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*设置ADC时钟*/
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //选择时钟6分频,ADCCLK = 72MHz / 6 = 12MHz
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0、PA1、PA2和PA3引脚初始化为模拟输入
/*不在此处配置规则组序列,而是在每次AD转换前配置,这样可以灵活更改AD转换的通道*/
/*ADC初始化*/
ADC_InitTypeDef ADC_InitStructure; //定义结构体变量
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //模式,选择独立模式,即单独使用ADC1
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //数据对齐,选择右对齐
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //外部触发,使用软件触发,不需要外部触发
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //连续转换,失能,每转换一次规则组序列后停止
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //扫描模式,失能,只转换规则组的序列1这一个位置
ADC_InitStructure.ADC_NbrOfChannel = 1; //通道数,为1,仅在扫描模式下,才需要指定大于1的数,在非扫描模式下,只能是1
ADC_Init(ADC1, &ADC_InitStructure); //将结构体变量交给ADC_Init,配置ADC1
/*ADC使能*/
ADC_Cmd(ADC1, ENABLE); //使能ADC1,ADC开始运行
/*ADC校准*/
ADC_ResetCalibration(ADC1); //固定流程,内部有电路会自动执行校准
while (ADC_GetResetCalibrationStatus(ADC1) == SET);
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1) == SET);
}
/**
* 函 数:获取AD转换的值
* 参 数:ADC_Channel 指定AD转换的通道,范围:ADC_Channel_x,其中x可以是0/1/2/3
* 返 回 值:AD转换的值,范围:0~4095
*/
uint16_t AD_GetValue(uint8_t ADC_Channel)
{
ADC_RegularChannelConfig(ADC1, ADC_Channel, 1, ADC_SampleTime_55Cycles5); //在每次转换前,根据函数形参灵活更改规则组的通道1
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //软件触发AD转换一次
while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); //等待EOC标志位,即等待AD转换结束
return ADC_GetConversionValue(ADC1); //读数据寄存器,得到AD转换的结果
}
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "AD.h"
uint16_t AD0, AD1, AD2, AD3; //定义AD值变量
int main(void)
{
/*模块初始化*/
// OLED_Init(); //OLED初始化
AD_Init(); //AD初始化
// /*显示静态字符串*/
// OLED_ShowString(1, 1, "AD0:");
// OLED_ShowString(2, 1, "AD1:");
// OLED_ShowString(3, 1, "AD2:");
// OLED_ShowString(4, 1, "AD3:");
while (1)
{
AD0 = AD_GetValue(ADC_Channel_0); //单次启动ADC,转换通道0
AD1 = AD_GetValue(ADC_Channel_1); //单次启动ADC,转换通道1
AD2 = AD_GetValue(ADC_Channel_2); //单次启动ADC,转换通道2
AD3 = AD_GetValue(ADC_Channel_3); //单次启动ADC,转换通道3
// OLED_ShowNum(1, 5, AD0, 4); //显示通道0的转换结果AD0
// OLED_ShowNum(2, 5, AD1, 4); //显示通道1的转换结果AD1
// OLED_ShowNum(3, 5, AD2, 4); //显示通道2的转换结果AD2
// OLED_ShowNum(4, 5, AD3, 4); //显示通道3的转换结果AD3
Delay_ms(100); //延时100ms,手动增加一些转换的间隔时间
}
}
[江科大]DMA-ADC多通道
#include "stm32f10x.h" // Device header
uint16_t AD_Value[4]; //定义用于存放AD转换结果的全局数组
/**
* 函 数:AD初始化
* 参 数:无
* 返 回 值:无
*/
void AD_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); //开启ADC1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); //开启DMA1的时钟
/*设置ADC时钟*/
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //选择时钟6分频,ADCCLK = 72MHz / 6 = 12MHz
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0、PA1、PA2和PA3引脚初始化为模拟输入
/*规则组通道配置*/
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_55Cycles5); //规则组序列1的位置,配置为通道0
ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 2, ADC_SampleTime_55Cycles5); //规则组序列2的位置,配置为通道1
ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 3, ADC_SampleTime_55Cycles5); //规则组序列3的位置,配置为通道2
ADC_RegularChannelConfig(ADC1, ADC_Channel_3, 4, ADC_SampleTime_55Cycles5); //规则组序列4的位置,配置为通道3
/*ADC初始化*/
ADC_InitTypeDef ADC_InitStructure; //定义结构体变量
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //模式,选择独立模式,即单独使用ADC1
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //数据对齐,选择右对齐
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //外部触发,使用软件触发,不需要外部触发
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; //连续转换,使能,每转换一次规则组序列后立刻开始下一次转换
ADC_InitStructure.ADC_ScanConvMode = ENABLE; //扫描模式,使能,扫描规则组的序列,扫描数量由ADC_NbrOfChannel确定
ADC_InitStructure.ADC_NbrOfChannel = 4; //通道数,为4,扫描规则组的前4个通道
ADC_Init(ADC1, &ADC_InitStructure); //将结构体变量交给ADC_Init,配置ADC1
/*DMA初始化*/
DMA_InitTypeDef DMA_InitStructure; //定义结构体变量
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&ADC1->DR; //外设基地址,给定形参AddrA
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; //外设数据宽度,选择半字,对应16为的ADC数据寄存器
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外设地址自增,选择失能,始终以ADC数据寄存器为源
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)AD_Value; // //存储器基地址,给定存放AD转换结果的全局数组AD_Value
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; //存储器数据宽度,选择半字,与源数据宽度对应
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //存储器地址自增,选择使能,每次转运后,数组移到下一个位置
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //数据传输方向,选择由外设到存储器,ADC数据寄存器转到数组
DMA_InitStructure.DMA_BufferSize = 4; //转运的数据大小(转运次数),与ADC通道数一致
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //模式,选择循环模式,与ADC的连续转换一致
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //存储器到存储器,选择失能,数据由ADC外设触发转运到存储器
DMA_InitStructure.DMA_Priority = DMA_Priority_Medium; //优先级,选择中等
DMA_Init(DMA1_Channel1, &DMA_InitStructure); //将结构体变量交给DMA_Init,配置DMA1的通道1
/*DMA和ADC使能*/
DMA_Cmd(DMA1_Channel1, ENABLE); //DMA1的通道1使能
ADC_DMACmd(ADC1, ENABLE); //ADC1触发DMA1的信号使能
ADC_Cmd(ADC1, ENABLE); //ADC1使能
/*ADC校准*/
ADC_ResetCalibration(ADC1); //固定流程,内部有电路会自动执行校准
while (ADC_GetResetCalibrationStatus(ADC1) == SET);
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1) == SET);
/*ADC触发*/
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //软件触发ADC开始工作,由于ADC处于连续转换模式,故触发一次后ADC就可以一直连续不断地工作
}
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "AD.h"
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
AD_Init(); //AD初始化
/*显示静态字符串*/
OLED_ShowString(1, 1, "AD0:");
OLED_ShowString(2, 1, "AD1:");
OLED_ShowString(3, 1, "AD2:");
OLED_ShowString(4, 1, "AD3:");
while (1)
{
OLED_ShowNum(1, 5, AD_Value[0], 4); //显示转换结果第0个数据
OLED_ShowNum(2, 5, AD_Value[1], 4); //显示转换结果第1个数据
OLED_ShowNum(3, 5, AD_Value[2], 4); //显示转换结果第2个数据
OLED_ShowNum(4, 5, AD_Value[3], 4); //显示转换结果第3个数据
Delay_ms(100); //延时100ms,手动增加一些转换的间隔时间
}
}


















 2041
2041




 到【灌水乐园】发言
到【灌水乐园】发言









