







最近在做re-di任务时,经常要用到parts信息,因此slice层是非常有用的,但是caffe中这一层的参数需要弄明白,这里将slice层的代码解读一下。
——————————————————————–caffe.proto———————————————————————–
message SliceParameter {
// The axis along which to slice -- may be negative to index from the end
// (e.g., -1 for the last axis).
// By default, SliceLayer concatenates blobs along the "channels" axis (1).
//默认是在channel维进行切分
optional int32 axis = 3 [default = 1];
//切分点,个数要比输出个数少1
repeated uint32 slice_point = 2;
// DEPRECATED: alias for "axis" -- does not support negative indexing.
optional uint32 slice_dim = 1 [default = 1];
}—————————————————————SliceLayer::LayerSetUp————————————————————–
template <typename Dtype>
void SliceLayer<Dtype>::LayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
//获取本层参数
const SliceParameter& slice_param = this->layer_param_.slice_param();
CHECK(!(slice_param.has_axis() && slice_param.has_slice_dim()))
<< "Either axis or slice_dim should be specified; not both.";
//vector清空,并从参数将切分点拷贝进来
slice_point_.clear();
std::copy(slice_param.slice_point().begin(),
slice_param.slice_point().end(),
std::back_inserter(slice_point_));
}—————————————————————SliceLayer::Reshape————————————————————–
template <typename Dtype>
void SliceLayer<Dtype>::Reshape(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
//获取输入blob维度,为4
const int num_axes = bottom[0]->num_axes();
const SliceParameter& slice_param = this->layer_param_.slice_param();
//如果指定切分维度的话,则在指定维度上进行切分,比如在H维
if (slice_param.has_slice_dim()) {
slice_axis_ = static_cast<int>(slice_param.slice_dim());
// Don't allow negative indexing for slice_dim, a uint32 -- almost
// certainly unintended.
CHECK_GE(slice_axis_, 0) << "casting slice_dim from uint32 to int32 "
<< "produced negative result; slice_dim must satisfy "
<< "0 <= slice_dim < " << kMaxBlobAxes;
CHECK_LT(slice_axis_, num_axes) << "slice_dim out of range.";
}
//不指定的话默认在channel维进行切分
else {
slice_axis_ = bottom[0]->CanonicalAxisIndex(slice_param.axis());
}
vector<int> top_shape = bottom[0]->shape();
//获取指定维度的大小,比如channel=16,切分点为[4, 8, 12]
const int bottom_slice_axis = bottom[0]->shape(slice_axis_);
//计算每次切分在一个batch中需要切分的次数,若在channel维进行切分,等于batchsize
num_slices_ = bottom[0]->count(0, slice_axis_);
//计算每次切分最小feature map的大小,若在channel维进行切分,等于HxW
slice_size_ = bottom[0]->count(slice_axis_ + 1);
//统计输出切分维度的大小
int count = 0;
if (slice_point_.size() != 0) {
CHECK_EQ(slice_point_.size(), top.size() - 1);
CHECK_LE(top.size(), bottom_slice_axis);
int prev = 0;
vector<int> slices;
for (int i = 0; i < slice_point_.size(); ++i) {
CHECK_GT(slice_point_[i], prev);
//统计每次切分的跨度,为[4, 4, 4, 4]
slices.push_back(slice_point_[i] - prev);
prev = slice_point_[i];
}
slices.push_back(bottom_slice_axis - prev);
//根据切分跨度,对输出进行reshape,并统计每个输出切分维度的大小
for (int i = 0; i < top.size(); ++i) {
top_shape[slice_axis_] = slices[i];
top[i]->Reshape(top_shape);
count += top[i]->count();
}
} else {
CHECK_EQ(bottom_slice_axis % top.size(), 0)
<< "Number of top blobs (" << top.size() << ") should evenly "
<< "divide input slice axis (" << bottom_slice_axis << ")";
top_shape[slice_axis_] = bottom_slice_axis / top.size();
for (int i = 0; i < top.size(); ++i) {
top[i]->Reshape(top_shape);
count += top[i]->count();
}
}
//check一下
CHECK_EQ(count, bottom[0]->count());
}—————————————————————SliceLayer::Forward_cpu————————————————————–
template <typename Dtype>
void SliceLayer<Dtype>::Forward_cpu(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
int offset_slice_axis = 0;
const Dtype* bottom_data = bottom[0]->cpu_data();
//获取要切分的维度大小,bottom_slice_axis = 16
const int bottom_slice_axis = bottom[0]->shape(slice_axis_);
//做法就是对每个输出计算输出和输入之间的offset关系,然后拷贝一下数据就ok了
for (int i = 0; i < top.size(); ++i) {
//一个输出的指针
Dtype* top_data = top[i]->mutable_cpu_data();
//获取输出指定切分维度大小
const int top_slice_axis = top[i]->shape(slice_axis_);
//将输入中一个batch的数据,一个一个的按照最小连续feature map拷贝到输出
//比如在channel维切分,num_slices_ = batchsize, top_slice_axis = 4
for (int n = 0; n < num_slices_; ++n) {
//将batch中的一个输入的连续4个feature map拷贝到输出
//输出指针移动4个feature map大小
const int top_offset = n * top_slice_axis * slice_size_;
//输入指针移动到下一个feature map的切分点
const int bottom_offset =
(n * bottom_slice_axis + offset_slice_axis) * slice_size_;
//拷贝数据
caffe_copy(top_slice_axis * slice_size_,
bottom_data + bottom_offset, top_data + top_offset);
}
//移动下一个切分点
offset_slice_axis += top_slice_axis;
}
}————————————————————–SliceLayer::Backward_cpu————————————————————
//反向与前向一样只是得到输入与输出之间的offset关系,然后拷贝数据
template <typename Dtype>
void SliceLayer<Dtype>::Backward_cpu(const vector<Blob<Dtype>*>& top,
const vector<bool>& propagate_down, const vector<Blob<Dtype>*>& bottom) {
if (!propagate_down[0]) { return; }
int offset_slice_axis = 0;
Dtype* bottom_diff = bottom[0]->mutable_cpu_diff();
const int bottom_slice_axis = bottom[0]->shape(slice_axis_);
//从每个top中将diff拷贝到bottom diff中
for (int i = 0; i < top.size(); ++i) {
const Dtype* top_diff = top[i]->cpu_diff();
const int top_slice_axis = top[i]->shape(slice_axis_);
for (int n = 0; n < num_slices_; ++n) {
//将top diff按照切分大小分别拷贝的bottom diff中,每次移动top_slice_axis = 4个feature map
const int top_offset = n * top_slice_axis * slice_size_;
//而bottom diff则每次要移动16个feature map,对应不同的输入
const int bottom_offset =
(n * bottom_slice_axis + offset_slice_axis) * slice_size_;
//拷贝数据
caffe_copy(top_slice_axis * slice_size_,
top_diff + top_offset, bottom_diff + bottom_offset);
}
//bottom diff指针移动到下一个切分点,然后继续从top diff中拷贝
offset_slice_axis += top_slice_axis;
}
}————————————————————————–用法举例————————————————————————–
将每个feature map切分成块
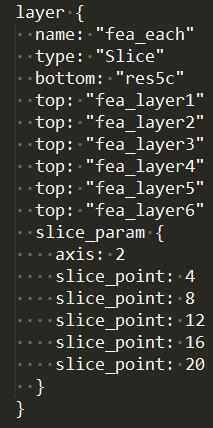
结果如图所示















 9258
9258











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









