








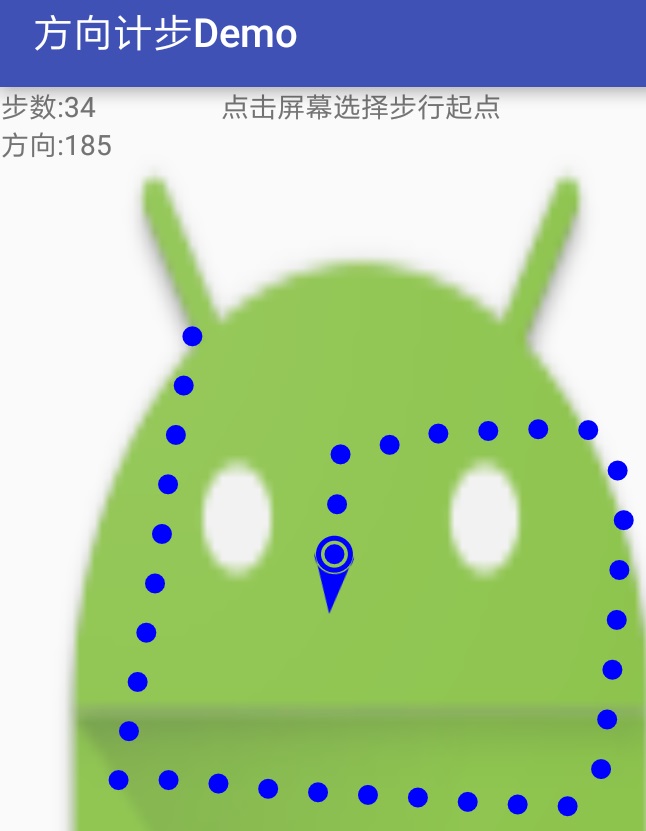
使用方向传感器,定位手机y轴方向(y轴与北方夹角0-360度)
y轴: 手机长边方向
x轴:手机短边方向
z轴:与手机平面垂直方向
本文源码:https://github.com/lioilwin/StepOrient
一.使用
public class MainActivity extends AppCompatActivity implements OrientSensor.OrientCallBack{
.........
@Override
public void Orient(float orient) {
// 方向回调,手机长边y轴与北方夹角0-360度
orientText.setText("方向:" + (int) orient);
}
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
orientText = (TextView) findViewById(R.id.orient_text);
// 开启方向监听
orientSensor = new OrientSensor(this, this);
if (!orientSensor.registerOrient()) {
Toast.makeText(this, "方向传感器不可用!", Toast.LENGTH_SHORT).show();
}
}
.......
}
二.方向传感器类
/**
* 方向传感器
*/
public class OrientSensor implements SensorEventListener {
private static final String TAG = "OrientSensor";
private SensorManager sensorManager;
private OrientCallBack orientCallBack;
private Context context;
float[] accelerometerValues = new float[3];
float[] magneticValues = new float[3];
public OrientSensor(Context context, OrientCallBack orientCallBack) {
this.context = context;
this.orientCallBack = orientCallBack;
}
public interface OrientCallBack {
/**
* 方向回调
*/
void Orient(int orient);
}
/**
* 注册加速度传感器和地磁场传感器
* @return 是否支持方向功能
*/
public Boolean registerOrient() {
Boolean isAvailable = true;
sensorManager = (SensorManager) context.getSystemService(Context.SENSOR_SERVICE);
// 注册加速度传感器
if (sensorManager.registerListener(this, sensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER),
SensorManager.SENSOR_DELAY_GAME)) {
Log.i(TAG, "加速度传感器可用!");
} else {
Log.i(TAG, "加速度传感器不可用!");
isAvailable = false;
}
// 注册地磁场传感器
if (sensorManager.registerListener(this, sensorManager.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD),
SensorManager.SENSOR_DELAY_GAME)) {
Log.i(TAG, "地磁传感器可用!");
} else {
Log.i(TAG, "地磁传感器不可用!");
isAvailable = false;
}
return isAvailable;
}
/**
* 注销方向监听器
*/
public void unregisterOrient() {
sensorManager.unregisterListener(this);
}
@Override
public void onSensorChanged(SensorEvent event) {
if (event.sensor.getType() == Sensor.TYPE_ACCELEROMETER) {
accelerometerValues = event.values.clone();
} else if (event.sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD) {
magneticValues = event.values.clone();
}
float[] R = new float[9];
float[] values = new float[3];
SensorManager.getRotationMatrix(R, null, accelerometerValues, magneticValues);
SensorManager.getOrientation(R, values);
int degree = (int) Math.toDegrees(values[0]);//旋转角度
if (degree < 0) {
degree += 360;
}
orientCallBack.Orient(degree);
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
}
}
简书: http://www.jianshu.com/p/066f667c99c3
CSDN博客: http://blog.csdn.net/qq_32115439/article/details/61620059
GitHub博客:http://lioil.win/2017/03/13/Android-Orient.html
Coding博客:http://c.lioil.win/2017/03/13/Android-Orient.html















 7479
7479

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









