









哪些文件被编入二进制映像
有两种方式使用DT。第一种可包含多个dtb,编入dt.img,最后放入boot.img。第二种只包含一个dtb,直接追加到kernelimage后面,放入boot.img。
第二种方式没看到后续如何放入 boot.img。对于第一种方式,会用”device/qcom/common/generate_extra_images.mk“中定义的下面规则编出”dt.img“,
$(INSTALLED_DTIMAGE_TARGET): $(DTBTOOL) $(INSTALLED_KERNEL_TARGET)
$(build-dtimage-target)
在”build/core/Makefile“中用下面语句使它被编入boot.img。
ifeq ($(strip $(BOARD_KERNEL_SEPARATED_DT)),true)
INTERNAL_BOOTIMAGE_ARGS += --dt $(INSTALLED_DTIMAGE_TARGET)
BOOTIMAGE_EXTRA_DEPS := $(INSTALLED_DTIMAGE_TARGET)
endif
dts加载流程
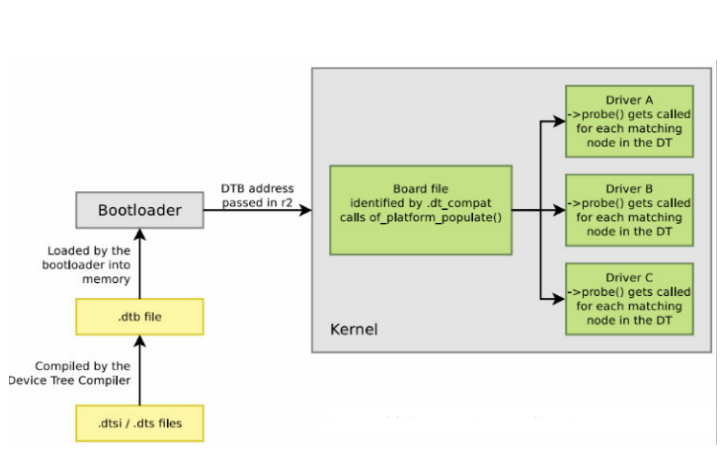
启动过程中,bootloader(默认是bootable/bootloader/lk)会根据机器硬件信息选择合适的devicetree装入内存,把地址等相关信息传给kernel。kernel中,会根据传入的信息创建设备。
msm8974目前实际用的应该是方式1。在下面boot_linux_from_mmc()中,调用dev_tree_get_entry_info(),里面会根据硬件(chipset和platform的id,系统实际跑时的信息在系统boot的更早阶段由N侧设置并传来,而DT中的信息由根节点的”qcom,msm-id“属性定义)来选择合适的DT,后面会把该DT装入内存,把地址等信息传给kernel(据说是通过CPU寄存器)。
qcom,msm-id = <126 8 0x20002>,
<185 8 0x20002>,
<186 8 0x20002>;
从lk中的处理
Lk/arch/arm/crt0.S文件中语句:bl kmain
调用的是lk/kernel/main.c文件中的函数:kmain()
kmain()
|bootstrap2()
|arch_init()
|platform_init()
|target_init()
|apps_init()//call init() of APPs defined using APP_START macro
|aboot_init()
|boot_linux_from_mmc()
|//for device tree approach 1
|dev_tree_get_entry_info()
|__dev_tree_get_entry_info()
|memmove((void *)hdr->tags_addr, (char *)dt_table_offset + dt_entry.offset, dt_entry.size);
|//for device tree approach 2
|dev_tree_appended()
|boot_linux()
|update_device_tree()
|entry(0, machtype, (unsigned*)tags_phys);//pass control to kernel
详细过程
Aboot.c (bootable\bootloader\lk\app\aboot)
APP_START(aboot)
.init = aboot_init,
APP_END
在下面aboot_init()—> boot_linux_from_mmc()中,调用dev_tree_get_entry_info(),里面会根据硬件(chipset和platform的id,系统实际跑时的信息在系统boot的更早阶段由N侧设置并传来,而DT中的信息由根节点的”qcom,msm-id“属性定义)来选择合适的DT,后面会把该DT装入内存,把地址等信息传给kernel(通过CPU寄存器)。
void boot_linux(void *kernel, unsigned *tags,
const char *cmdline, unsigned machtype,
void *ramdisk, unsigned ramdisk_size)
{
#if DEVICE_TREE
//更新Device Tree
ret = update_device_tree((void *)tags, final_cmdline, ramdisk, ramdisk_size);
}
/* Top level function that updates the device tree. */
int update_device_tree(void *fdt, const char *cmdline,
void *ramdisk, uint32_t ramdisk_size)
{
int ret = 0;
uint32_t offset;
/* Check the device tree header */
//核查其magic数是否正确:version和size
ret = fdt_check_header(fdt);
/* Add padding to make space for new nodes and properties. */
//Move or resize dtb buffer
ret = fdt_open_into(fdt, fdt, fdt_totalsize(fdt) + DTB_PAD_SIZE);
/* Get offset of the memory node */
ret = fdt_path_offset(fdt, "/memory");
offset = ret;
ret = target_dev_tree_mem(fdt, offset);
/* Get offset of the chosen node */
ret = fdt_path_offset(fdt, "/chosen");
offset = ret;
/* Adding the cmdline to the chosen node */
ret = fdt_setprop_string(fdt, offset, (const char*)"bootargs", (const void*)cmdline);
/* Adding the initrd-start to the chosen node */
ret = fdt_setprop_u32(fdt, offset, "linux,initrd-start", (uint32_t)ramdisk);
if (ret)
/* Adding the initrd-end to the chosen node */
ret = fdt_setprop_u32(fdt, offset, "linux,initrd-end", ((uint32_t)ramdisk + ramdisk_size));
fdt_pack(fdt);
return ret;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
Kernel中的处理
在下面的setup_machine_fdt()中,会通过用各机器描述(machine description)的”dt_compat“属性和传入DT的根节点的”compatible”属性进行匹配来选择适当的machine description。会在下面board_dt_populate()处理中,会根据devicetree信息创建设备。
主要的数据流包括:
(1)初始化流程,即扫描dtb并将其转换成Device Tree Structure。
(2)传递运行时参数传递以及platform的识别
(3)将Device Tree Structure并入linux kernel的设备驱动模型。
汇编部分的代码分析
linux/arch/arm/kernel/head.S文件定义了bootloader和kernel的参数传递要求:
MMU = off, D-cache = off, I-cache = dont care, r0 = 0, r1 = machine nr, r2 = atags or dtb pointer.
目前的kernel支持旧的tag list的方式,同时也支持device tree的方式。r2可能是device tree binary file的指针(bootloader要传递给内核之前要copy到memory中),也可以是tag list的指针。在ARM的汇编部分的启动代码中(主要是head.S和head-common.S),machine type ID和指向DTB或者atags的指针被保存在变量__machine_arch_type和__atags_pointer中,这么做是为了后续C代码进行处理。
start_kernel()
|setup_arch()
|setup_machine_fdt()//select machine description according to DT info
customize_machine()//called because it is an arch_initcall
|msm8974_init()
|board_dt_populate()
|of_platform_bus_create()
|of_platform_device_create_pdata()
|of_device_alloc()
|dev->dev.of_node = of_node_get(np);//pointer to data of struct device_node, that is device node in DT
|of_platform_bus_create()//call it recursively to walk through the DT
获得machine描述符
//根据Device Tree的信息,找到最适合的machine描述符。
struct machine_desc * __init setup_machine_fdt(unsigned int dt_phys)
{
/* 扫描 /chosen node,保存运行时参数(bootargs)到boot_command_line,此外,还处理initrd相关的property,并保存在initrd_start和initrd_end这两个全局变量中 */
of_scan_flat_dt(early_init_dt_scan_chosen, boot_command_line);
/* 扫描根节点,获取 {size,address}-cells信息,并保存在dt_root_size_cells和dt_root_addr_cells全局变量中 */
of_scan_flat_dt(early_init_dt_scan_root, NULL);
/* 扫描DTB中的memory node,并把相关信息保存在meminfo中,全局变量meminfo保存了系统内存相关的信息。*/
of_scan_flat_dt(early_init_dt_scan_memory, NULL);
/* Change machine number to match the mdesc we're using */
__machine_arch_type = mdesc_best->nr;
return mdesc_best;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
运行时参数是在扫描DTB的chosen node时候完成的,具体的动作就是获取chosen node的bootargs、initrd等属性的value,并将其保存在全局变量(boot_command_line,initrd_start、initrd_end)中。
将DTB转换成device node的结构的节点
在系统初始化的过程中,我们需要将DTB转换成节点是device_node的树状结构,以便后续方便操作。具体的代码位于setup_arch->unflatten_device_tree中。
void __init unflatten_device_tree(void)
{
__unflatten_device_tree(initial_boot_params, &allnodes,
early_init_dt_alloc_memory_arch);
/* Get pointer to "/chosen" and "/aliasas" nodes for use everywhere */
of_alias_scan(early_init_dt_alloc_memory_arch);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
unflatten_device_tree函数的主要功能就是扫描DTB,将device node被组织成:
(1)global list。全局变量struct device_node *of_allnodes就是指向设备树的global list
(2)tree。
static void __unflatten_device_tree(struct boot_param_header *blob,
struct device_node **mynodes,
void * (*dt_alloc)(u64 size, u64 align))
{
//此处删除了health check代码,例如检查DTB header的magic,确认blob的确指向一个DTB。
/* scan过程分成两轮,第一轮主要是确定device-tree structure的长度,保存在size变量中 */
start = ((unsigned long)blob) +
be32_to_cpu(blob->off_dt_struct);
size = unflatten_dt_node(blob, 0, &start, NULL, NULL, 0);
size = (size | 3) + 1;
/* 初始化的时候,并不是扫描到一个node或者property就分配相应的内存,实际上内核是一次性的分配了一大片内存,这些内存包括了所有的struct device_node、node name、struct property所需要的内存。*/
mem = (unsigned long)
dt_alloc(size + 4, __alignof__(struct device_node));
((__be32 *)mem)[size / 4] = cpu_to_be32(0xdeadbeef);
/* 这是第二轮的scan,第一次scan是为了得到保存所有node和property所需要的内存size,第二次就是实打实的要构建device node tree了 */
start = ((unsigned long)blob) +
be32_to_cpu(blob->off_dt_struct);
unflatten_dt_node(blob, mem, &start, NULL, &allnextp, 0);
//此处略去校验溢出和校验OF_DT_END。
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
并入linux kernel的设备驱动模型
在linux kernel引入统一设备模型之后,bus、driver和device形成了设备模型中的铁三角。在驱动初始化的时候会将代表该driver的一个数据结构(一般是xxx_driver)挂入bus上的driver链表。device挂入链表分成两种情况,一种是即插即用类型的bus,在插入一个设备后,总线可以检测到这个行为并动态分配一个device数据结构(一般是xxx_device,例如usb_device),之后,将该数据结构挂入bus上的device链表。bus上挂满了driver和device,那么如何让device遇到“对”的那个driver呢?就是bus的match函数。
系统应该会根据Device tree来动态的增加系统中的platform_device(这个过程并非只发生在platform bus上,也可能发生在其他的非即插即用的bus上,例如AMBA总线、PCI总线)。 如果要并入linux kernel的设备驱动模型,那么就需要根据device_node的树状结构(root是of_allnodes)将一个个的device node挂入到相应的总线device链表中。只要做到这一点,总线机制就会安排device和driver的约会。当然,也不是所有的device node都会挂入bus上的设备链表,比如cpus node,memory node,choose node等。
没有挂入bus的device node
(1) cpus node的处理
暂无,只有choose node的相关处理。
(2) memory的处理
int __init early_init_dt_scan_memory(unsigned long node, const char *uname,
int depth, void *data)
{
char *type = of_get_flat_dt_prop(node, "device_type", NULL);
/*在初始化的时候,我们会对每一个device node都要调用该call back函数,因此,我们要过滤掉那些和memory block定义无关的node。和memory block定义有的节点有两种,一种是node name是memory@形态的,另外一种是node中定义了device_type属性并且其值是memory。*/
if (type == NULL) {
if (depth != 1 || strcmp(uname, "memory@0") != 0)
return 0;
} else if (strcmp(type, "memory") != 0)
return 0;
/*获取memory的起始地址和length的信息。有两种属性和该信息有关,一个是linux,usable-memory,不过最新的方式还是使用reg属性。*/
reg = of_get_flat_dt_prop(node, "linux,usable-memory", &l);
if (reg == NULL)
reg = of_get_flat_dt_prop(node, "reg", &l);
if (reg == NULL)
return 0;
endp = reg + (l / sizeof(__be32));
/*reg属性的值是address,size数组,那么如何来取出一个个的address/size呢?由于memory node一定是root node的child,因此dt_root_addr_cells(root node的#address-cells属性值)和dt_root_size_cells(root node的#size-cells属性值)之和就是address,size数组的entry size。*/
while ((endp - reg) >= (dt_root_addr_cells + dt_root_size_cells)) {
u64 base, size;
base = dt_mem_next_cell(dt_root_addr_cells, ®);
size = dt_mem_next_cell(dt_root_size_cells, ®);
if (size == 0)
continue;
//将具体的memory block信息加入到内核中。
early_init_dt_add_memory_arch(base, size);
}
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
(3) interrupt controller的处理
初始化是通过start_kernel->init_IRQ->machine_desc->init_irq()实现的。我们用Qualcomm MSM 8974为例来描述interrupt controller的处理过程。下面是machine描述符的定义:/arch/arm/mach-msm/board-8974.c
DT_MACHINE_START(MSM8974_DT, "Qualcomm MSM 8974 (Flattened Device Tree)")
.init_irq = msm_dt_init_irq,
.dt_compat = msm8974_dt_match,
...
MACHINE_END
源码文件:/arch/arm/mach-msm/board-dt.c
void __init msm_dt_init_irq(void)
{
struct device_node *node;
of_irq_init(irq_match);
node = of_find_matching_node(NULL, mpm_match);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
of_irq_init函数:遍历Device Tree,找到匹配的irqchip。具体的代码如下:
void __init of_irq_init(const struct of_device_id *matches)
{
/*遍历所有的node,寻找定义了interrupt-controller属性的node,如果定义了interrupt-controller属性则说明该node就是一个中断控制器。*/
for_each_matching_node(np, matches) {
if (!of_find_property(np, "interrupt-controller", NULL))
continue;
/*分配内存并挂入链表,当然还有根据interrupt-parent建立controller之间的父子关系。对于interrupt controller,它也可能是一个树状的结构。*/
desc = kzalloc(sizeof(*desc), GFP_KERNEL);
desc->dev = np;
desc->interrupt_parent = of_irq_find_parent(np);
if (desc->interrupt_parent == np)
desc->interrupt_parent = NULL;
list_add_tail(&desc->list, &intc_desc_list);
}
/*正因为interrupt controller被组织成树状的结构,因此初始化的顺序就需要控制,应该从根节点开始,依次递进到下一个level的interrupt controller。 */
while (!list_empty(&intc_desc_list)) {
/*intc_desc_list链表中的节点会被一个个的处理,每处理完一个节点就会将该节点删除,当所有的节点被删除,整个处理过程也就是结束了。*/
list_for_each_entry_safe(desc, temp_desc, &intc_desc_list, list) {
const struct of_device_id *match;
int ret;
of_irq_init_cb_t irq_init_cb;
/*最开始的时候parent变量是NULL,确保第一个被处理的是root interrupt controller。在处理完root node之后,parent变量被设定为root interrupt controller,因此,第二个循环中处理的是所有parent是root interrupt controller的child interrupt controller。也就是level 1(如果root是level 0的话)的节点。*/
if (desc->interrupt_parent != parent)
continue;
list_del(&desc->list);//从链表中删除
match = of_match_node(matches, desc->dev);//匹配并初始化
//match->data是初始化函数
if (WARN(!match->data,
"of_irq_init: no init function for %s\n",
match->compatible)) {
kfree(desc);
continue;
}
irq_init_cb = match->data;//执行初始化函数
ret = irq_init_cb(desc->dev, desc->interrupt_parent);
/*处理完的节点放入intc_parent_list链表,后面会用到*/
list_add_tail(&desc->list, &intc_parent_list);
}
/* 对于level 0,只有一个root interrupt controller,对于level 1,可能有若干个interrupt controller,因此要遍历这些parent interrupt controller,以便处理下一个level的child node。 */
desc = list_first_entry(&intc_parent_list, typeof(*desc), list);
list_del(&desc->list);
parent = desc->dev;
kfree(desc);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
只有该node中有interrupt-controller这个属性定义,那么linux kernel就会分配一个interrupt controller的描述符(struct intc_desc)并挂入队列。通过interrupt-parent属性,可以确定各个interrupt controller的层次关系。在scan了所有的Device Tree中的interrupt controller的定义之后,系统开始匹配过程。一旦匹配到了interrupt chip列表中的项次后,就会调用相应的初始化函数。
以i2c总线为例
以i2c总线为例加载DTS设备节点的流程
/ {
model = "Qualcomm MSM 8974";
compatible = "qcom,msm8974";
interrupt-parent = <&intc>;
aliases {
spi0 = &spi_0;
spi7 = &spi_7;
sdhc1 = &sdhc_1; /* SDC1 eMMC slot */
sdhc2 = &sdhc_2; /* SDC2 SD card slot */
sdhc3 = &sdhc_3; /* SDC3 SDIO slot */
sdhc4 = &sdhc_4; /* SDC4 SDIO slot */
};
memory {
secure_mem: secure_region {
linux,contiguous-region;
reg = <0 0x7800000="">;
label = "secure_mem";
};
adsp_mem: adsp_region {
linux,contiguous-region;
reg = <0 0x2000000="">;
label = "adsp_mem";
};
};
intc: interrupt-controller@F9000000 {
compatible = "qcom,msm-qgic2";
interrupt-controller;
#interrupt-cells = <3>;
reg = <0xf9000000 0x1000="">,
<0xf9002000 0x1000="">;
};
msmgpio: gpio@fd510000 {
compatible = "qcom,msm-gpio";
gpio-controller;
#gpio-cells = <2>;
interrupt-controller;
#interrupt-cells = <2>;
reg = <0xfd510000 0x4000="">;
ngpio = <146>;
interrupts = <0 208="" 0="">;
qcom,direct-connect-irqs = <8>;
};
wcd9xxx_intc: wcd9xxx-irq {
compatible = "qcom,wcd9xxx-irq";
interrupt-controller;
#interrupt-cells = <1>;
interrupt-parent = <&msmgpio>;
interrupts = <72 0="">;
interrupt-names = "cdc-int";
};
timer {
compatible = "arm,armv7-timer";
interrupts = <1 2="" 0="" 1="" 3="" 0="">;
clock-frequency = <19200000>;
};
i2c_0: i2c@f9967000 { /* BLSP#11 */
cell-index = <0>;
compatible = "qcom,i2c-qup";
reg = <0xf9967000 0x1000="">;
#address-cells = <1>;
#size-cells = <0>;
reg-names = "qup_phys_addr";
interrupts = <0 105="" 0="">;
interrupt-names = "qup_err_intr";
qcom,i2c-bus-freq = <100000>;
qcom,i2c-src-freq = <50000000>;
};
i2c_2: i2c@f9924000 {
cell-index = <2>;
compatible = "qcom,i2c-qup";
reg = <0xf9924000 0x1000="">;
#address-cells = <1>;
#size-cells = <0>;
reg-names = "qup_phys_addr";
interrupts = <0 96="" 0="">;
interrupt-names = "qup_err_intr";
qcom,i2c-bus-freq = <100000>;
qcom,i2c-src-freq = <50000000>;
};
spi_0: spi@f9923000 {
compatible = "qcom,spi-qup-v2";
reg = <0xf9923000 0x1000="">;
interrupts = <0 95="" 0="">;
spi-max-frequency = <19200000>;
#address-cells = <1>;
#size-cells = <0>;
gpios = <&msmgpio 3 0>, /* CLK */
<&msmgpio 1 0>, /* MISO */
<&msmgpio 0 0>; /* MOSI */
cs-gpios = <&msmgpio 9 0>;
};
};
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
从上面可知,系统平台上挂载了很多总线,如i2c、spi、uart等等,每一个总线分别被描述为一个节点。Linux在启动后,到C入口时,会执行以下操作,加载系统平台上的总线和设备:
start_kernel() --> setup_arch() --> unflatten_device_tree()
在执行完unflatten_device_tree()后,DTS节点信息被解析出来,保存到allnodes链表中,allnodes会在后面被用到。
随后,当系统启动到board文件时,会调用.init_machine,高通8974平台对应的是msm8974_init()。接着调用of_platform_populate(....)接口,加载平台总线和平台设备。至此,系统平台上的所有已配置的总线和设备将被注册到系统中。注意:不是dtsi文件中所有的节点都会被注册,在注册总线和设备时,会对dts节点的状态作一个判断,如果节点里面的status属性没有被定义,或者status属性被定义了并且值被设为“ok”或者“okay”,其他情况则不被注册到系统中。
上面重复讲了Linux怎样使用DTS注册平台总线和平台设备到系统中,那么其他设备,例如i2c、spi设备是怎样注册到系统中的呢?下面我们就以i2c设备为例,讲解Linux怎样注册i2c设备到系统中。
以高通8974平台为例,在注册i2c总线时,会调用到qup_i2c_probe()接口,该接口用于申请总线资源和添加i2c适配器。在成功添加i2c适配器后,会调用of_i2c_register_devices()接口。此接口会解析i2c总线节点的子节点(挂载在该总线上的i2c设备节点),获取i2c设备的地址、中断号等硬件信息。然后调用request_module()加载设备对应的驱动文件,调用i2c_new_device(),生成i2c设备。此时设备和驱动都已加载,于是drvier里面的probe方法将被调用。后面流程就和之前一样了。
简而言之,Linux采用DTS描述设备硬件信息后,省去了大量板文件垃圾信息。Linux在开机启动阶段,会解析DTS文件,保存到全局链表allnodes中,在掉用.init_machine时,会跟据allnodes中的信息注册平台总线和设备。值得注意的是,加载流程并不是按找从树根到树叶的方式递归注册,而是只注册根节点下的第一级子节点,第二级及之后的子节点暂不注册。Linux系统下的设备大多都是挂载在平台总线下的,因此在平台总线被注册后,会根据allnodes节点的树结构,去寻找该总线的子节点,所有的子节点将被作为设备注册到该总线上。















 4242
4242

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









